





以下控制器調整程式基於 Ziegler 和 Nichols 的研究,他們是四分之一衰減比調整技術的開發者,該技術結合了理論和經驗觀察所得(Corripio 2000)。可嘗試這些技術並使用一個過程控制模擬 VI 進行比較。對於不同的過程,一種方法可能比另一種更容易或更準確。例如,一些最適合在線控制器使用的技術,無法承受此處所述的較大擾動。
要在 LabVIEW 中執行這些測試,請設定控制策略,並在大型條帶圖上顯示 PV(過程變數)、SP(設定點)和輸出,圖表的軸顯示值隨時間的變化。請參考本章的「閉環(極限增益)調整程式」和「開環(步階測試)調整程式」部分,以了解有關擾動迴路和從圖表確定回應的更多訊息。更多有關這些程式的訊息,請參閱本手冊「相關文獻」部分中列出的 Corripio(2000)。
閉環(極限增益)調整程式
雖然閉環(極限增益)調整程式非常精確,但必須使過程進入穩定的振盪狀態,並在條帶圖上觀察 PV。執行閉環調整程式的步驟如下:
- 將 PID 控制器上的微分時間和積分時間均設定為 0。
- 在控制器處於自動模式下,小心地以小增量增加比例增益 (Kc)。在每次增加後進行小的 SP 改變來擾動迴路。隨著 Kc 的增加,PV 的值應開始振盪。繼續調整,直到振盪保持穩定,不隨時間增長或衰減。
- 記錄控制器的比例帶 (PBu),以百分比表示,PBu = 100 / Kc。
- 記錄振盪週期 (Tu),以分鐘為單位。
- 按照表 3-1 中顯示的係數乘以測得的值,並將新的調整參數輸入到控制器中。表 3-1 提供了四分之一衰減比的適當值。
| 調整參數 | 調整係數 |
| 比例增益 (Kc) | Kc = 100 / PBu |
| 積分時間 (Ti) | Ti = (1/2) * Tu |
| 微分時間 (Td) | Td = (1/8) * Tu |
表 3-1:閉環–四分之一衰減比值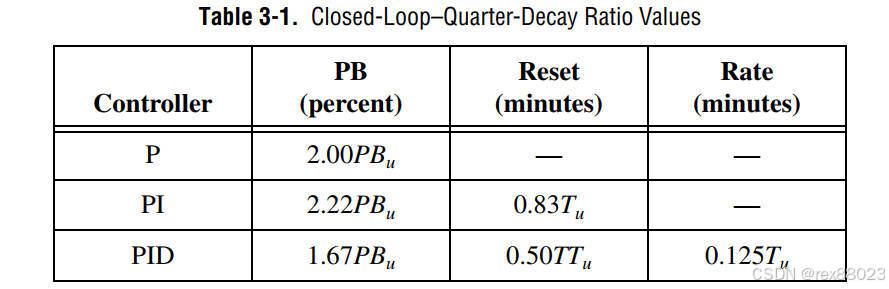
開環(步驟測試)調整程式
開環(步驟測試)調整程式假設您可以將任何過程建模為一階延遲和純滯後。這種方法需要比閉環調整程式更多的分析,但您的過程不需要達到持續的振盪。因此,對於許多過程來說,開環調整程式可能更快且更可靠。請在顯示時間作為 x 軸的條形圖上觀察輸出和過程變數 (PV)。
執行開環調整程式的步驟如下:
- 將控制器設定為手動模式,將輸出設定為名義執行值,並允許 PV 完全穩定。記錄 PV 和輸出值。
- 進行輸出的步驟變化。記錄新的輸出值。
- 等待 PV 穩定。從圖表中確定從圖 3-4 顯示的樣本推導出的值。
這些變數代表以下值:
- Td—滯後時間(以分鐘為單位)。
- T—時間常數(以分鐘為單位)。
- K—過程增益 = (PV 的變化)/(輸出的變化)。
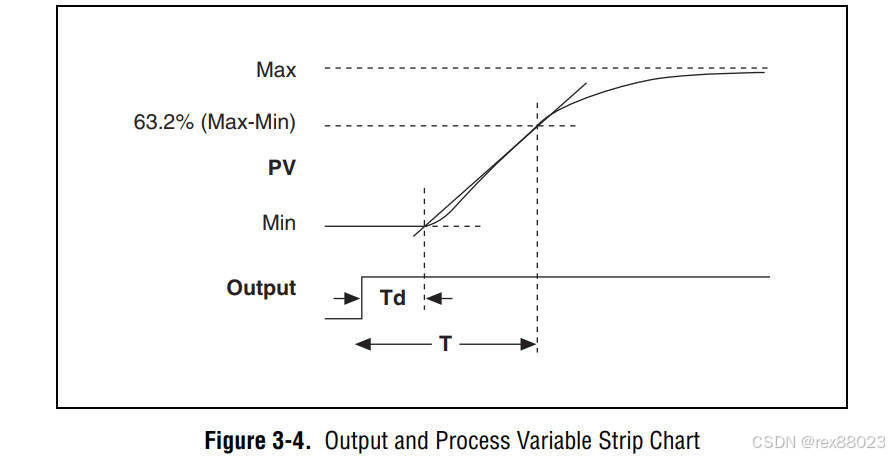 圖 3-4. 輸出和過程變數條形圖。
圖 3-4. 輸出和過程變數條形圖。
4. 將測得的值乘以表 3-2 中顯示的係數,並將新的調整參數輸入到控制器中。該表提供了四分之一衰減比的適當值。如果您希望減少超調,請降低增益 Kc。
表 3-2:開環–四分之一衰減比值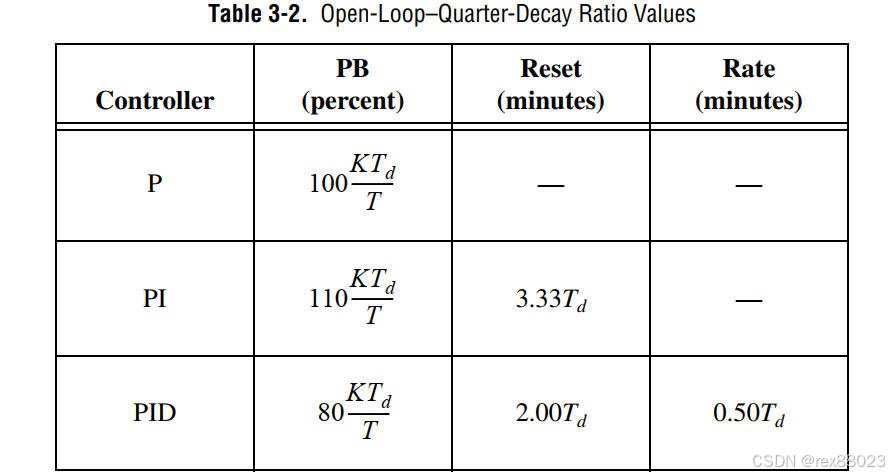

















 7402
7402

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









