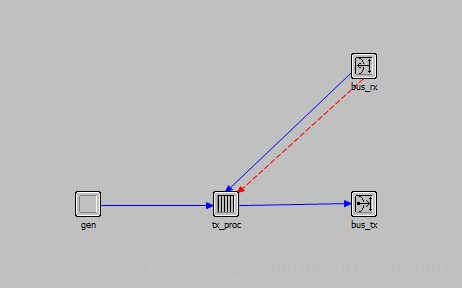
节点模型 lmz_cct_csma_tx
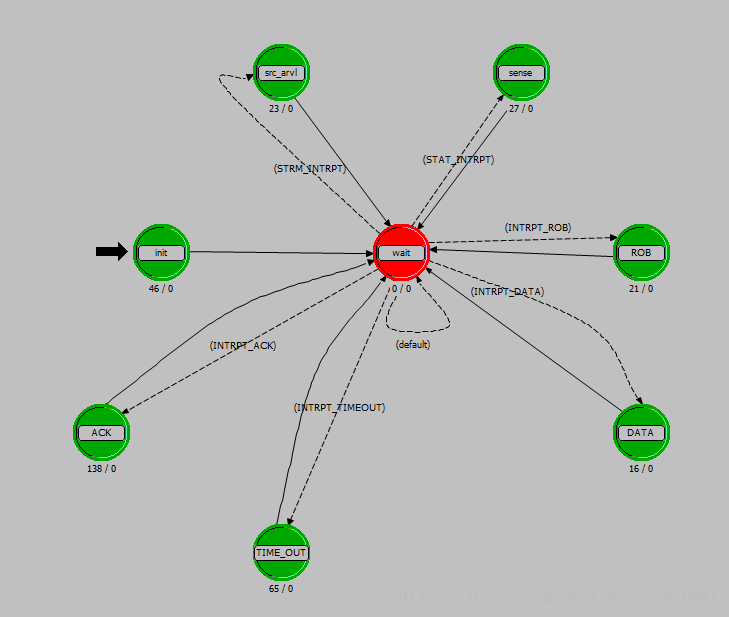
进程模型 bbbccc_csma_tx
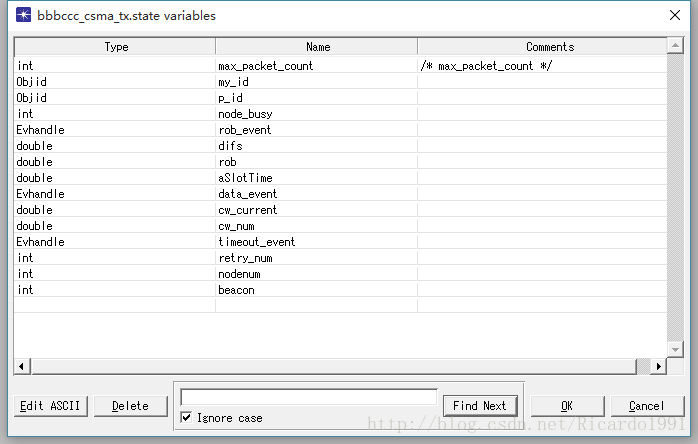
SV
TV
char node_name [128 ];
char module_name [128 ];
int namelength;
int i;
int i_temp;
HB
#define IN_STRM 0
#define ACK_STRM 1
#define OUT_STRM 0
#define CH_BUSY_STAT 0
#define STRM_INTRPT ((op_intrpt_type() == OPC_INTRPT_STRM) && (op_intrpt_strm() == IN_STRM) && beacon == 1)
#define STAT_INTRPT (op_intrpt_type() == OPC_INTRPT_STAT && beacon == 1)
#define INTRPT_ROB ((op_intrpt_type() == OPC_INTRPT_SELF) && (op_intrpt_code() == ROB_INIT) && beacon == 1)
#define INTRPT_DATA ((op_intrpt_type() == OPC_INTRPT_SELF) && (op_intrpt_code() == DATA_INIT) && beacon == 1)
#define INTRPT_TIMEOUT ((op_intrpt_type() == OPC_INTRPT_SELF) && (op_intrpt_code() == TIMEOUT_INIT) && beacon == 1)
#define INTRPT_ACK ((op_intrpt_type() == OPC_INTRPT_STRM) && (op_intrpt_strm() == ACK_STRM) )
extern int subm_pkts;
extern int sending;
extern int sended;
#define FREE (op_stat_local_read (CH_BUSY_STAT) == 0.0)
#define PKTS_QUEUED (!op_subq_empty (0))
#define ROB_INIT 0
#define DATA_INIT 1
#define TIMEOUT_INIT 2
#include <string.h>
#include <math.h>
init
my_id = op_id_self ();
p_id = op_topo_parent(my_id);
op_ima_obj_attr_get (p_id, "name", node_name);
op_ima_obj_attr_get (my_id, "name", module_name);
printf("%s ",node_name);
printf("%s ",module_name);
printf("initing...\n");
namelength = strlen(node_name);
nodenum = 0;
i_temp = 0;
for(i=5;i<=namelength - 1;i++)
{
i_temp = node_name[i] - '0';
nodenum = 10*nodenum + i_temp;
}
printf("node number is %d\n",nodenum);
node_busy = 0;
difs = 0.01;
rob = -1;
aSlotTime = 0.02;
cw_current = 0;
cw_num = 2;
retry_num = 0;
beacon = 0;
sending = 0;
sended = 0;
src_arvl
Packet* data_pkt
data_pkt = op_pk_get(IN_STRM)
//op_pk_nfd_set (data_pkt , "src" , nodenum)
//op_pk_print (data_pkt )
op_subq_pk_insert (0 , data_pkt , OPC_QPOS_TAIL)
if (FREE && node_busy == 0 )
{
rob_event = op_intrpt_schedule_self (op_sim_time() + difs, ROB_INIT)
node_busy = 1
}
sense
if (!FREE)
{
printf ("one\n" );
if (op_ev_valid(rob_event) == OPC_TRUE)
{
op_ev_cancel(rob_event);
node_busy = 0 ;
printf ("two\n" );
}
}
if (FREE && node_busy == 0 && PKTS_QUEUED)
{
rob_event = op_intrpt_schedule_self (op_sim_time() + difs, ROB_INIT);
node_busy = 1 ;
printf ("three\n" );
}
printf ("four\n" );
ROB
cw_current = pow(2 ,cw_num)-1 ;
rob = aSlotTime*( int )op_dist_uniform(cw_current);
printf ("rob time is %f \n" ,rob);
printf ("cw_num is %f \n" ,cw_num);
printf ("cw_current is %f \n" ,cw_current);
cw_num++;
data_event = op_intrpt_schedule_self (op_sim_time() + rob, DATA_INIT);
DATA
Packet* data_pkt
timeout_event = op_intrpt_schedule_self (op_sim_time() + 0.018 , TIMEOUT_INIT)
printf("time out event scheduling...\n" )
data_pkt = op_pk_create_fmt ("aaa_csma_ca_data" )
op_pk_nfd_set (data_pkt , "src" , nodenum)
op_pk_nfd_set (data_pkt , "time" , op_pk_creation_time_get (op_subq_pk_access (0 , 0 ) ))
op_pk_print (data_pkt )
op_pk_send(data_pkt ,OUT_STRM)
printf("data sending...\n" )
TIME_OUT
if (retry_num <= 10 )
{
retry_num++;
//cw _current = 2 ^cw_num-1 ;
cw_current = pow(2 ,cw_num)-1 ;
rob = aSlotTime*( int )op_dist_uniform(cw_current);
printf ("rob time is %f \n" ,rob);
printf ("cw_num is %f \n" ,cw_num);
printf ("cw_current is %f \n" ,cw_current);
printf ("retry num is %d \n" ,retry_num);
++cw_num;
data_event = op_intrpt_schedule_self (op_sim_time() + 0 .002 +rob, DATA_INIT);
}
else
{
op_subq_pk_remove (0 , 0 );
node_busy = 0 ;
cw_num = 2 ;
retry_num = 0 ;
cw_current = 0 ;
if (beacon == 1 )
{
sended++;
if (sended == sending)
{
Packet* beacon_pkt;
beacon_pkt = op_pk_create_fmt ("aaa_packet_beacon_on" );
op_pk_nfd_set (beacon_pkt, "on" , 0 );
op_pk_print (beacon_pkt);
op_pk_send(beacon_pkt,OUT_STRM);
sended = 0 ;
sending = 0 ;
}
}
}
ACK
Packet* pkptr;
int node_flag;
int node_src;
int node_on;
pkptr = op_pk_get(ACK_STRM);
op_pk_nfd_get_int32 (pkptr, "flag" , &node_flag);
if (node_flag == 1 )
{
op_pk_nfd_get_int32 (pkptr, "dest" , &node_src);
if (node_src == nodenum)
{
printf("ack packet received!\n" );
node_busy = 0 ;
cw_num = 2 ;
retry_num = 0 ;
cw_current = 0 ;
if (beacon == 1 )
{
sended++;
if (sended == sending)
{
Packet* beacon_pkt;
beacon_pkt = op_pk_create_fmt ("aaa_packet_beacon_on" );
op_pk_nfd_set (beacon_pkt, "on" , 0 );
op_pk_print (beacon_pkt);
op_pk_send(beacon_pkt,OUT_STRM);
sended = 0 ;
sending = 0 ;
}
}
if (op_ev_valid(timeout_event) == OPC_TRUE)
{
op_ev_cancel(timeout_event);
printf("timeout_event canceled\n" );
}
op_pk_destroy(pkptr);
op_subq_pk_remove (0 , 0 );
if (op_subq_empty (0 ) == OPC_TRUE)
{
printf("subqueue is empty!\n" );
}
}
else
{
op_pk_destroy(pkptr);
}
}
if (node_flag == 0 )
{
printf("data packet received!" );
op_pk_destroy(pkptr);
}
if (node_flag == 3 )
{
op_pk_nfd_get_int32 (pkptr, "on" , &node_on);
if (node_on == 1 )
{
beacon = 1 ;
if (!op_subq_empty (0 ) == OPC_TRUE)
{
sending++;
}
}
else
{
beacon = 0 ;
}
printf("beacon packet received!\n" );
printf("beacon status is %d\n" ,beacon);
op_pk_destroy(pkptr);
}
if (node_flag == 4 )
{
op_pk_destroy(pkptr);
}
if (node_flag == 5 )
{
op_pk_destroy(pkptr);
}























 1270
1270

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









