









文件格式以及原理参考老外的文章:https://librenepal.com/article/reading-srtm-data-with-python/
GDAL包:https://github.com/OSGeo/gdal/releases/tag/v3.1.3
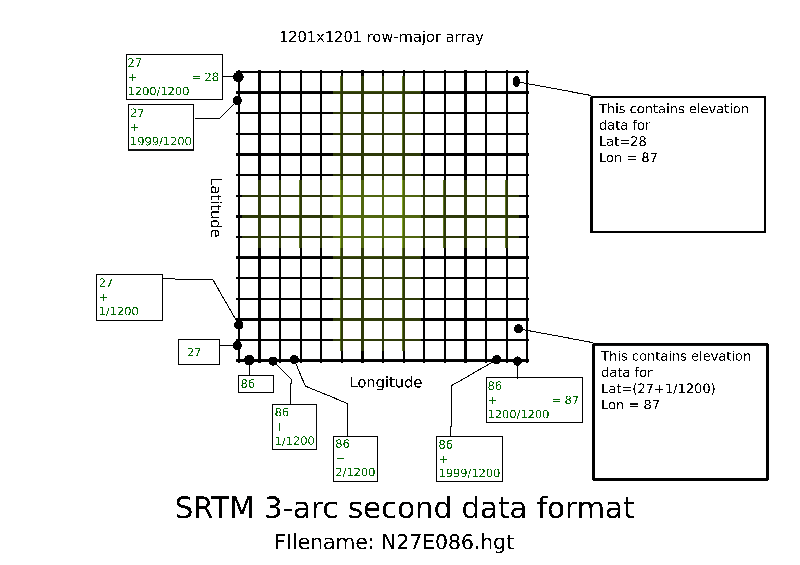
其实文件格式很容易理解,比如是1/3弧度的精度情况下,就是1度分为1/1200份,所以一个文件表示经度和维度各1度的方格,就是切成1200x1200份,存储为二维矩阵是1201x1201,因为边界占了1行1列:
其中二维数组是按照地图来存储的,所以从低维度和低经度取索引时候需要计算下:
老外是用python写的,我用c++重写的,歌词大意如下:
#pragma once
#include <math.h>
#include <string.h>
#include <stdio.h>
#include <string>
#include <math.h>
#include <iostream>
#include <memory>
#include <algorithm>
#include <map>
#include <mutex>
#include <thread>
//#include "include/gdal.h"
#include <gdal_priv.h>
#ifdef _DEBUG
#pragma comment(lib, "gdal_i_d.lib")
#else
#pragma comment(lib, "gdal_i.lib")
#endif
using namespace std;
// 数据结构
class SRTM
{
public:
SRTM()
{
if (runOnce == false)
{
GDALAllRegister();
// windows操作系统使用GBK
CPLSetConfigOption("GDAL_FILENAME_IS_UTF8", "NO");
runOnce = true;
}
}
~SRTM()
{
if (pData != nullptr)
delete[] pData;
//std::cerr << "SRTM析构释放数据" << endl;
};
// 分辨率
const int sample = 1200;
static bool runOnce;
private:
SRTM(const SRTM & other) = delete;
SRTM & operator = (const SRTM & other) = delete;
SRTM(SRTM && other) = delete;
SRTM & operator = (SRTM && other) = delete;
unsigned int nWidth = 1201;
unsigned int nHeight = 1201;
// c++17以前不支持动态数组使用shared_ptr管理
// std::unique_ptr<short[]> data;
short int *pData = nullptr;
double minLat;
double maxLat;
double minLon;
double maxLon;
static double Mercator2Lon(double lon)//墨卡托转WGS84:经度
{
return lon / 20037508.34 * 180.0;
}
static double Mercator2Lat(double lat)//墨卡托转WGS84:纬度
{
double result = 0;
double mid = lat / 20037508.34 * 180.0;
result = 180.0 / M_PI * (2.0 * atan(exp(mid * M_PI / 180.0)) - M_PI / 2.0);
return result;
}
public:
// 从二维数组中查询,但是编号是二维数组的左下角,需要重新计算一下index
bool query(short & height, double lat, double lon)
{
if (pData == nullptr)
return false;
int lat_row = int(round((lat - int(lat)) * sample));
int lon_row = int(round((lon - int(lon)) * sample));
//lat_row = int(round((lat - minLat) * sample));
//lon_row = int(round((lon - minLon) * sample));
lat_row = abs(lat_row);
lon_row = abs(lon_row);
size_t index = (nHeight - 1 - lat_row) * nWidth + lon_row;
if (index >= sample * sample)
return false;
height = pData[index];
return true;
}
bool load(const std::string fileName)
{
return load(fileName.c_str());
}
bool load(const char * fileName)
{
GDALDataset *poDataSet;
GDALRasterBand *pBand;
poDataSet = (GDALDataset*)GDALOpen(fileName, GA_ReadOnly);
if (poDataSet == nullptr)
return false;
this->nWidth = poDataSet->GetRasterXSize();//获取图像宽度
this->nHeight = poDataSet->GetRasterYSize();//获取图像高度
// 存储边界信息
double adfGeoTransform[6];
double value[6];
if (poDataSet->GetGeoTransform(adfGeoTransform) == CE_None)
{
value[0] = adfGeoTransform[0]; // 起点,左上经度
value[1] = adfGeoTransform[3]; // 起点,左上维度
value[2] = adfGeoTransform[1] * (double)nWidth + adfGeoTransform[0]; // 右侧经度
value[3] = adfGeoTransform[5] * (double)nHeight + adfGeoTransform[3]; // 右下
if (value[0] > 180 || value[0] < -180)//墨卡托转WGS84
{
value[0] = Mercator2Lon(value[0]);
value[1] = Mercator2Lat(value[1]);
value[2] = Mercator2Lon(value[2]);
value[3] = Mercator2Lat(value[3]);
}
}
this->minLon = value[0];
this->maxLon = value[2];
this->minLat = value[3];
this->maxLat = value[1];
if (pData != nullptr)
delete[] pData;
this->pData = new short[nWidth * nHeight];
pBand = poDataSet->GetRasterBand(1);
pBand->RasterIO(GF_Read, 0, 0, nWidth, nHeight, pData, nWidth, nHeight,
pBand->GetRasterDataType(), 0, 0);
//int i = pData[1000 * nWidth + 1];
GDALClose(poDataSet);//关闭数据集
return true;
}
public:
// 通过经纬度计算标准文件名
static std::string getFileName(double lat, double lon)
{
char ns;
char ew;
if (lat >= 0)
ns = 'N';
else
ns = 'S';
if (lon >= 0)
ew = 'E';
else
ew = 'W';
char buffer[20];
int i_lat = abs(int(lat));
int i_lon = abs(int(lon));
//snprintf(buffer, 20, "%.1s", &ns);
snprintf(buffer, 20, "%.1s%02d%.1s%03d.hgt", &ns, i_lat, &ew, i_lon);
return buffer;
}
};
// 初始化
bool SRTM::runOnce = false;
// c++ 17
//namespace fs = std::filesystem;
// 对缓存进行管理
class SRTM_Cache
{
public:
SRTM_Cache(const char * dir) : rootDir(dir)
{
setRootPath(dir);
}
~SRTM_Cache()
{
// 自动释放资源
//dataMap.clear();
}
void setRootPath(const char * dir)
{
rootDir = dir;
// 去掉末尾的\\
size_t off = rootDir.rfind('\\', rootDir.size());
if (off > 0 && (off == rootDir.size()-1))
rootDir = rootDir.substr(0, off);
}
bool query(short & height, double lat, double lon)
{
std::string fileName = SRTM::getFileName(lat, lon);
bool ret = false;
std::shared_ptr<SRTM> ptr = nullptr;
{ // 添加作用域,提早解锁
std::lock_guard<std::mutex> autoLock(mapMutex); // 加锁
auto it = dataMap.find(fileName);
if (it == dataMap.end())
{
// 尝试加载文件
std::string filePath = rootDir + "\\" + fileName;
ptr = std::make_shared<SRTM>();
ret = ptr->load(filePath);
if (ret)
{
dataMap.insert(std::pair<std::string, std::shared_ptr<SRTM> >(fileName, ptr));
}
else
{
return false;
}
return ret;
}
else
{
std::shared_ptr<SRTM> ptr = it->second;
}
} // 添加作用域,提早解锁
//std::cout << ptr.use_count() << endl;
if (ptr != nullptr)
{
ret = ptr->query(height, lat, lon);
return ret;
}
return false;
} // end of query
private:
SRTM_Cache(const SRTM_Cache & other) = delete;
SRTM_Cache& operator =(const SRTM_Cache & other) = delete;
// 用智能指针管理数据类实例,因为已经禁止了赋值和拷贝构造,
std::map<std::string, std::shared_ptr<SRTM> > dataMap;
std::string rootDir;
// 添加多线程互斥
std::mutex mapMutex;
};
使用的方法如下:
// readDEM.cpp : 此文件包含 "main" 函数。程序执行将在此处开始并结束。
//
#include <iostream>
#include "SRTM.h"
int main()
{
SRTM_Cache manager("D:\\DEM数据\\SRTM3-90米全国DEM\\");
double lat = 39.990618;
double lon = 116.169644;
short heiht;
bool ret = manager.query(heiht, lat, lon);
if (ret == false)
{
std::cout << "false" << endl;
}
else
{
string str;
str.resize(100, '\0');
snprintf(const_cast<char *>(str.data()), 100, "%.5f, %.5f 高程:%d", lat, lon, heiht);
std::cout << str.c_str() << endl;
}
lat = 41.56;
ret = manager.query(heiht, lat, lon);
if (ret == false)
{
std::cout << "false" << endl;
}
else
{
string str;
str.resize(100, '\0');
snprintf(const_cast<char *>(str.data()), 100, "%.5f, %.5f 高程:%d", lat, lon, heiht);
std::cout << str.c_str() << endl;
}
}
结果:
39.99062, 116.16964 高程:509
41.56000, 116.16964 高程:1792备注:
使用vcpkg管理各种开源包真的非常的方便,比自己一个一个找强多了。















 3703
3703











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









