







一、CNN基础
因本身有图像处理和图像深度学习方面的基础,故在此只罗列一些重要概念词,后续再补上:
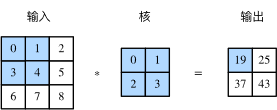
二维互相关运算:二维互相关(cross-correlation)运算的输入是一个二维输入数组和一个二维核(kernel)数组,输出也是一个二维数组,其中核数组通常称为卷积核或过滤器(filter)。卷积核的尺寸通常小于输入数组,卷积核在输入数组上滑动,在每个位置上,卷积核与该位置处的输入子数组按元素相乘并求和,得到输出数组中相应位置的元素。下图展示了一个互相关运算的例子,阴影部分分别是输入的第一个计算区域、核数组以及对应的输出。
二维卷积层:二维卷积层将输入和卷积核做互相关运算,并加上一个标量偏置来得到输出。卷积层的模型参数包括卷积核和标量偏置。
特征图:二维卷积层输出的二维数组可以看作是输入在空间维度(宽和高)上某一级的表征,也叫特征图(feature map)。
感受野:影响元素 x x x的前向计算的所有可能输入区域(可能大于输入的实际尺寸)叫做 x x x的感受野(receptive field)。
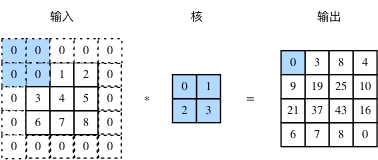
填充:填充(padding)是指在输入高和宽的两侧填充元素(通常是0元素),下图中我们在原输入高和宽的两侧分别添加了值为0的元素。
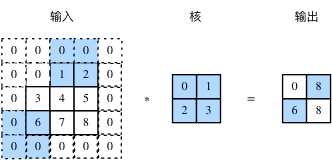
步幅:在互相关运算中,卷积核在输入数组上滑动,每次滑动的行数与列数即是步幅(stride)。此前我们使用的步幅都是1,下图展示了在高上步幅为3、在宽上步幅为2的二维互相关运算。
对于不同卷积的可视化,可以参考conv-visulization
池化层:池化层主要用于缓解卷积层对位置的过度敏感性。同卷积层一样,池化层每次对输入数据的一个固定形状窗口(又称池化窗口)中的元素计算输出,池化层直接计算池化窗口内元素的最大值或者平均值,该运算也分别叫做最大池化或平均池化。
卷积后的输出空间尺寸计算公式:
⌊ ( n h + p h − k h + s h ) / s h ⌋ × ⌊ ( n w + p w − k w + s w ) / s w ⌋ \lfloor(n_h+p_h-k_h+s_h)/s_h\rfloor \times \lfloor(n_w+p_w-k_w+s_w)/s_w\rfloor ⌊(nh+p
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 663
663











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









