






/*
*Copyright (c) 2015 烟台大学计算机与控制工程学院
*All right reserved.
*文件名称:shunxuzhan.cpp
*作者:孙钰坤
*完成日期:2015年10月9日
*问题描述:定义顺序栈存储结构,实现其基本运算,并完成测试。头文件:sqstack.h,
包含定义顺序栈数据结构的代码、宏定义、要实现算法的函数的声明;源文件:sqstack.cpp,
包含实现各种算法的函数的定义在同一项目(project)中建立一个源文件(如main.cpp),
编制main函数,完成相关的测试工作。
*/
*Copyright (c) 2015 烟台大学计算机与控制工程学院
*All right reserved.
*文件名称:shunxuzhan.cpp
*作者:孙钰坤
*完成日期:2015年10月9日
*问题描述:定义顺序栈存储结构,实现其基本运算,并完成测试。头文件:sqstack.h,
包含定义顺序栈数据结构的代码、宏定义、要实现算法的函数的声明;源文件:sqstack.cpp,
包含实现各种算法的函数的定义在同一项目(project)中建立一个源文件(如main.cpp),
编制main函数,完成相关的测试工作。
*/
#ifndef SQSTACK_H_INCLUDED
#define SQSTACK_H_INCLUDED
#define MaxSize 100
typedef char ElemType;
typedef struct
{
ElemType data[MaxSize];
int top; //栈指针
} SqStack; //顺序栈类型定义
void InitStack(SqStack *&s); //初始化栈
void DestroyStack(SqStack *&s); //销毁栈
bool StackEmpty(SqStack *s); //栈是否为空
int StackLength(SqStack *s); //返回栈中元素个数——栈长度
bool Push(SqStack *&s,ElemType e); //入栈
bool Pop(SqStack *&s,ElemType &e); //出栈
bool GetTop(SqStack *s,ElemType &e); //取栈顶数据元素
void DispStack(SqStack *s); //输出栈
#endif // SQSTACK_H_INCLUDED
#include <stdio.h>
#include <malloc.h>
void InitStack(SqStack *&s)
{
s=(SqStack *)malloc(sizeof(SqStack));
s->top=-1;
}
void DestroyStack(SqStack *&s)
{
free(s);
}
int StackLength(SqStack *s) //返回栈中元素个数——栈长度
{
return(s->top+1);
}
bool StackEmpty(SqStack *s)
{
return(s->top==-1);
}
bool Push(SqStack *&s,ElemType e)
{
if (s->top==MaxSize-1) //栈满的情况,即栈上溢出
return false;
s->top++;
s->data[s->top]=e;
return true;
}
bool Pop(SqStack *&s,ElemType &e)
{
if (s->top==-1) //栈为空的情况,即栈下溢出
return false;
e=s->data[s->top];
s->top--;
return true;
}
bool GetTop(SqStack *s,ElemType &e)
{
if (s->top==-1) //栈为空的情况,即栈下溢出
return false;
e=s->data[s->top];
return true;
}
void DispStack(SqStack *s) //输出栈
{
int i;
for (i=s->top;i>=0;i--)
printf("%c ",s->data[i]);
printf("\n");
}
#include <stdio.h>
int main()
{
ElemType e;
SqStack *s;
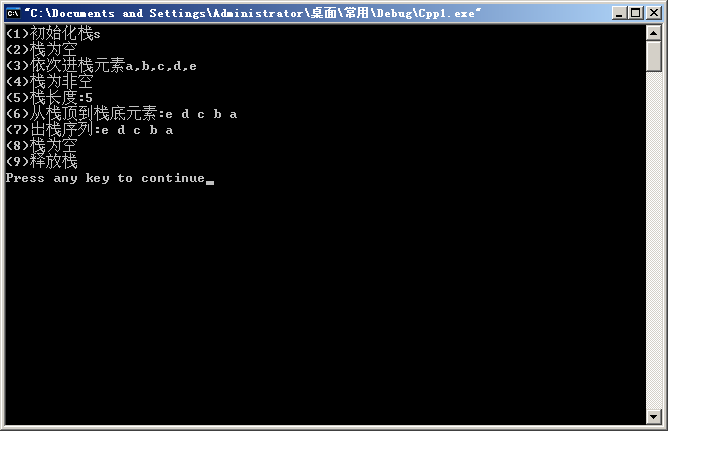
printf("(1)初始化栈s\n");
InitStack(s);
printf("(2)栈为%s\n",(StackEmpty(s)?"空":"非空"));
printf("(3)依次进栈元素a,b,c,d,e\n");
Push(s,'a');
Push(s,'b');
Push(s,'c');
Push(s,'d');
Push(s,'e');
printf("(4)栈为%s\n",(StackEmpty(s)?"空":"非空"));
printf("(5)栈长度:%d\n",StackLength(s));
printf("(6)从栈顶到栈底元素:");DispStack(s);
printf("(7)出栈序列:");
while (!StackEmpty(s))
{
Pop(s,e);
printf("%c ",e);
}
printf("\n");
printf("(8)栈为%s\n",(StackEmpty(s)?"空":"非空"));
printf("(9)释放栈\n");
DestroyStack(s);
return 0;
}
运算结果:
心得体会:栈是最常用和最重要的数据结构之一,从数据结构的定义来看,栈属于线性表的一种,与线性表的不同在于栈的插入,删除和运算均受某种特殊限制。栈可以采用顺序存储结构,分配一块连续的存储区域来存放栈中元素,并用一个变量指向当前的栈顶元素以反映栈中元素的变化。采用顺序存储的栈叫做顺序栈。















 636
636

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









