最近一段时间把研究生课题算是确定下来了,虽然破费周折。我的科研题目暂定为基于视频的车辆综合信息提取及其硬件实现。需要做的主要是提取车辆的长宽高的三维信息。我决定使用双目视觉的方法来实现。虽然微软的kinect可以很方便的求取图像的深度图,但是我仍觉得机器视觉是一个不错的方法。最近一段时间在看相关信息,所以进行一个总结。
1 立体视觉:
立体视觉是计算机视觉领域的一个重要课题,目的在于重构场景的三维几何信息,具有很多的应用价值。
一般而言,有三种研究方法
1 直接利用测距器获得程距信息,建立三维描述的方法。
2 仅仅利用一幅图像所提供的信息推断三维形状的方法
3 利用不同视点上的,也许不同时间,不同角度的 两幅图或多幅图像提供的信息重构三维结构的方法。:双目视觉是一种特例。
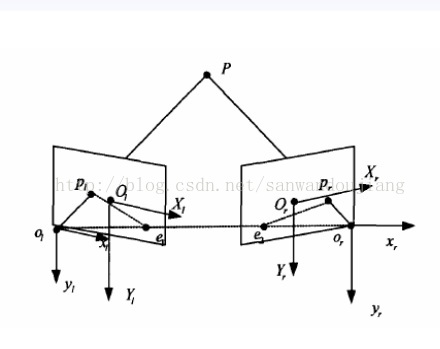
2 双目视觉:
尽管图像中包含丰富的信息,但从一幅图像无法直接获取沿某条投影的深度。所以至少需要两幅图像才可以通过三角测量方法得到点的深度。
原理: 双目视觉技术是仿照人类利用双目线索感知深度信息方法实现对三维信息的感知。即运用两个摄像机对同一个景物从不同位置成像,进而从视差中恢复深度信息。
构成: 双目像机(或者一个像机),固定支架, 标定模板,后续图像处理
实现流程:先用双目系统分别从不同位置拍摄已知世界坐标系(标定板),进而得出该系统在当前位置下内参数。然后再用该系统去看未知被测物,反算出被测的三维信息。
核心技术:双目系统标定的精度保证;两图像间的点点对应精度提取,即物体特征点准确提取。

双目测量系统核心技术有2点:系统标定和特征点提取
2.1 双目标定
标定就是系统的初始化, 标定的精度直接决定测量结果。
提高精度的方法有: 1 稳定可靠的数学模型和软件实现方式
2 高精度的标定板
3 良好的光照环境
4 对比度良好的图像
2.2 后续图像处理
标定工作的完成意味着测量工具的制作完成,后面三维信息获取时,首先要得到三维信息的特征点。 在特征点提取时可以用到一些图像处理的算法:灰度化,二值化,边缘检测,焦点检测,边界跟踪,圆形检测等。
2.3 图像立体匹配
(后续会进行补充)


























 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









