







立体匹配主要是通过找出每对图像间的对应关系,根据三角测量原理,得到视差图;在获得了视差信息后,根据投影模型很容易地可以得到原始图像的深度信息和三维信息。立体匹配技术被普遍认为是立体视觉中最困难也是最关键的问题,主要是以下因素的影响:
(1) 光学失真和噪声(亮度、色调、饱和度等失衡)

(2) 平滑表面的镜面反射

(3) 投影缩减(Foreshortening)

(4) 透视失真(Perspective distortions)

(5) 低纹理(Low texture)

(6) 重复纹理(Repetitive/ambiguous patterns)

(7) 透明物体

(8) 重叠和非连续

目前立体匹配算法是计算机视觉中的一个难点和热点,算法很多,但是一般的步骤是:
A、匹配代价计算
匹配代价计算是整个立体匹配算法的基础,实际是对不同视差下进行灰度相似性测量。常见的方法有灰度差的平方SD(squared intensity differences),灰度差的绝对值AD(absolute intensity differences)等。另外,在求原始匹配代价时可以设定一个上限值,来减弱叠加过程中的误匹配的影响。以AD法求匹配代价为例,可用下式进行计算,其中T为设定的阈值。

图18
B、 匹配代价叠加
一般来说,全局算法基于原始匹配代价进行后续算法计算。而区域算法则需要通过窗口叠加来增强匹配代价的可靠性,根据原始匹配代价不同,可分为:
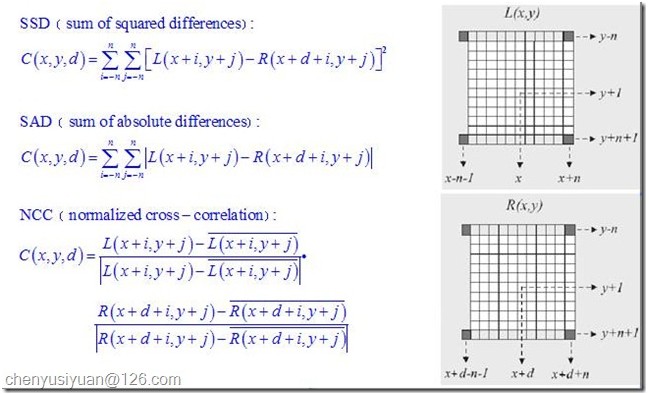
图19
C、 视差获取
对于区域算法来说,在完成匹配代价的叠加以后,视差的获取就很容易了,只需在一定范围内选取叠加匹配代价最优的点(SAD和SSD取最小值,NCC取最大值)作为对应匹配点,如胜者为王算法WTA(Winner-take-all)。而全局算法则直接对原始匹配代价进行处理,一般会先给出一个能量评价函数,然后通过不同的优化算法来求得能量的最小值,同时每个点的视差值也就计算出来了。
D、视差细化(亚像素级)
大多数立体匹配算法计算出来的视差都是一些离散的特定整数值,可满足一般应用的精度要求。但在一些精度要求比较高的场合,如精确的三维重构中,就需要在初始视差获取后采用一些措施对视差进行细化,如匹配代价的曲线拟合、图像滤波、图像分割等。















 11万+
11万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









