









In many papers(such as [1], [2]), we need to solve the polar decomposition of a matrix which decompose a matrix A into a rotation matrix R and a symmetric matrix S, s.t. A = RS
Here, we will be using Eigen library to solve this problem contained in paper [2].
In Eigen library, there is no method can solve polar decomposition directly. Thus, we must find another ways to do this. Fortunately, up to now, I have already found two ways to deal with this problem. So let's cut into our theme:
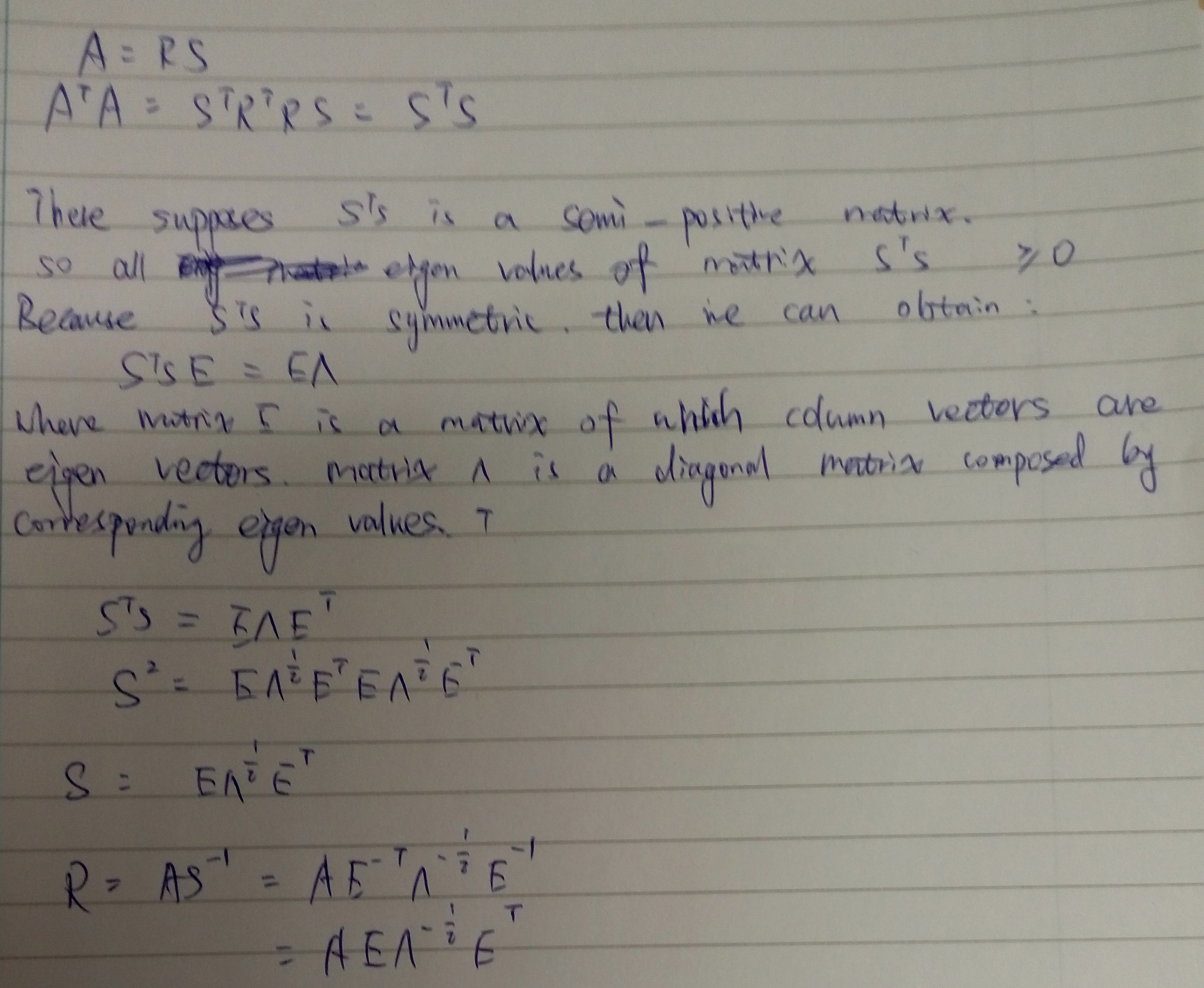
First, I would like to introduce something about how to obtain matrix R, S from the polar decomposition, please look at the following picture:
Then CGAL source code is presented:
bool polar_eigen(const Matrix& A, Matrix& R)
{
if(A.determinant() < 0)
{ return false; }
typedef Matrix::Scalar Scalar;
const Scalar th = std::sqrt(Eigen::NumTraits<Scalar>::dummy_precision());
Eigen::SelfAdjointEigenSolver<Matrix> eig;
CGAL::feclearexcept(FE_UNDERFLOW);
eig.computeDirect(A.transpose()*A);//solve eigen values and eigen vectors
if(CGAL::fetestexcept(FE_UNDERFLOW) || eig.eigenvalues()(0)/eig.eigenvalues()(2)<th) // to make sure the matrix is semi-positive
{ return false; }
Vector S = eig.eigenvalues().cwiseSqrt();
R = A * eig.eigenvectors() * S.asDiagonal().inverse()
* eig.eigenvectors().transpose();
if(std::abs(R.squaredNorm()-3.) > th || R.determinant() < 0)// because R is an orthonormal matrix the squared norms of which column vectors should be 1
{ return false; }
R.transposeInPlace(); // the optimal rotation matrix should be transpose of decomposition result, only in paper[2], generally we don't need tranpose it
return true;
}
feclearexcept and fetestexcept are used to detect some excetion which are defined in the source code below:
// Copyright (c) 2010-2011 GeometryFactory Sarl (France)
//
// This file is part of CGAL (www.cgal.org); you can redistribute it and/or
// modify it under the terms of the GNU Lesser General Public License as
// published by the Free Software Foundation; either version 3 of the License,
// or (at your option) any later version.
//
// Licensees holding a valid commercial license may use this file in
// accordance with the commercial license agreement provided with the software.
//
// $URL$
// $Id$
//
//
// Author(s) : Laurent Rineau
#include <cfloat>
#ifndef FE_INVALID
# define FE_INEXACT _EM_INEXACT
# define FE_UNDERFLOW _EM_UNDERFLOW
# define FE_OVERFLOW _EM_OVERFLOW
# define FE_DIVBYZERO _EM_ZERODIVIDE
# define FE_INVALID _EM_INVALID
#endif
namespace CGAL {
// replacement for C99 functions
inline int
feclearexcept(int exceptions) {
_clearfp();
return 0;
}
inline int
fetestexcept(int exceptions)
{
#if defined(_M_IX86) && _M_IX86_FP > 0
// On x86/x64 processors, when SSE is used.
unsigned int i1;
unsigned int i2;
_statusfp2(&i1, &i2);
return (i1 & exceptions) | (i2 & exceptions);
#else
// On x86 processors without SSE, or on other processors supported by MSVC
return _statusfp() & exceptions;
#endif
}
} // end namespace CGAL
the second way is to use single value decomposition which written in CGAL like below:
/// Computes the closest rotation to `m` and places it into `R`
void compute_close_rotation(const Matrix& m, Matrix& R)
{
Eigen::JacobiSVD<Eigen::Matrix3d> solver;
solver.compute( m, Eigen::ComputeFullU | Eigen::ComputeFullV );
const Matrix& u = solver.matrixU(); const Matrix& v = solver.matrixV();
R = v * u.transpose();
if( R.determinant() < 0 ) {
Matrix u_copy = u;
u_copy.col(2) *= -1; // singular values sorted ascendingly
R = v * u_copy.transpose(); // re-extract rotation matrix
}
}Here R is denoted as the way in the paper [2] needs. Normally R should be expressed as R = U * V.transpose();
[1] Meshless Deformations Based on Shape Matching
[2] As-Rigid-As-Possible surface Modeling















 523
523

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









