








{3.2. Conformal stiffness energy
LConformal(T)=∥T11−T22∥2+∥T22−T33∥2+∥T33−T11∥2+∥T12+T21∥2+∥T23+T32∥2+∥T31+T13∥2
where
Minimizing this objective function is equivalent to the following equation set:
∥T11−T22∥=0
∥T22−T33∥=0
∥T33−T11∥=0
∥T12+T21∥=0
∥T23+T32∥=0
∥T31+T13∥=0
[see the fourth one in http://blog.csdn.net/seamanj/article/details/51803822 , which can be applied in following derivations]
which can be written in matrix form:
}
{consist energe
∀i,∀j∈N(i)
,
∥Ti(v0j−v0i)+v0i+ti−(v0j+tj)∥=0
writing in matrix form leads to:
Collecting all the unknown variables into a column vector yields us:
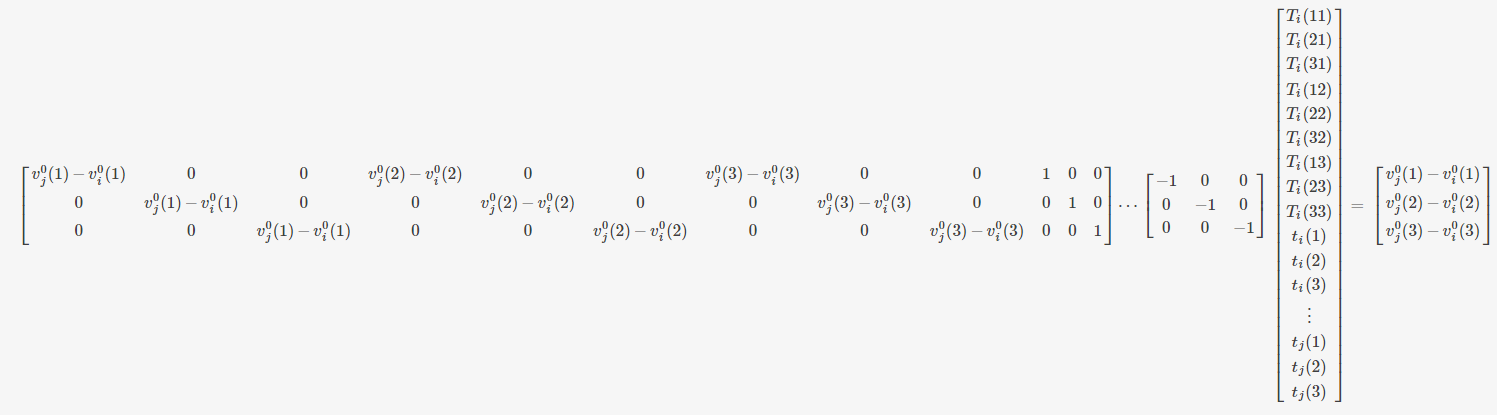
}
{smooth energe
∀i,∀j∈N(i)
,
∥Ti(v0j−v0i)+Tj(v0i−v0j)∥=0
writing in matrix form leads to:
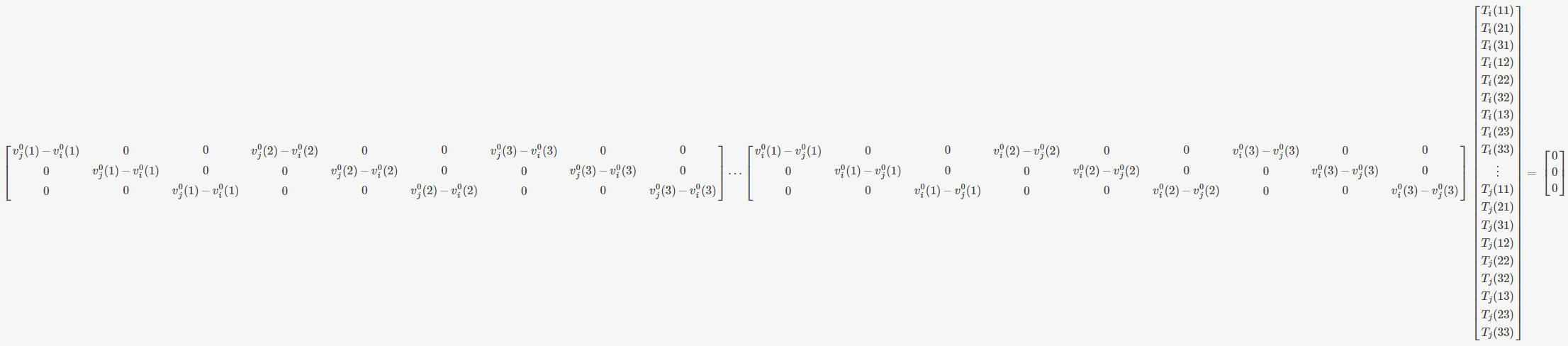
}
At last, I would like release the matlab source of this paper:
clear;
consist = 1;
smooth = 1;
conformal = 1;
feature = 1;
closest = 1;
X0=read_obj('sphere_before.obj');
V=X0.xyz'; % list of vertex positions
F=X0.tri'; % list of triangles indices
N=X0.vertex_mean_normal';
n = size(V,1); %number of vertices
if( feature || closest )
X1=read_obj('sphere_ffd.obj');
V_target=X1.xyz'; % list of vertex positions
F_target=X1.tri';
end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%finding neighbour%%%%%%%%%%%%%%%%%%%%%%%%%%%%
neighbour_matrix = zeros(n,n);
for i=1:n
neighbour = find(F(:,1)==i | F(:,2)==i | F(:,3)==i);
neighbour = F(neighbour,:);
neighbour = setdiff(neighbour(:),i);
neighbour_matrix(i,neighbour(:)) = ones(1,size(neighbour,2));
end
neighbour_count = sum(sum(neighbour_matrix,2),1);
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%consist%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
if(consist)
E_consist_A=zeros(3*neighbour_count, 12*n);
E_consist_b=zeros(3*neighbour_count, 1);
tic
%%construct matrix for consist energe
count = 1;
for i = 1:n
for j = 1:n
if( neighbour_matrix(i,j) && i~=j)
E_consist_A((count-1)*3+1 : count*3, (i-1)*12 + 1 : i*12) = ...
[eye(3)*(V(j,1)-V(i,1)) eye(3)*(V(j,2)-V(i,2)) eye(3)*(V(j,3)-V(i,3)) eye(3)];
E_consist_A((count-1)*3+1 : count*3, (j-1)*12 + 10 : j*12) = ...
-1 * eye(3);
E_consist_b((count-1)*3+1 : count*3,1) = V(j,:)' - V(i,:)';
count = count + 1;
end
end
end
t = toc;
fprintf('construction for consist energe completes: %gs\n',t);
end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%smooth%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
if(smooth)
E_smooth_A=zeros(3*neighbour_count, 12*n);
E_smooth_b=zeros(3*neighbour_count, 1);
tic
%construct matrix for smooth energe
count = 1;
for i = 1:n
for j = 1:n
if( neighbour_matrix(i,j) && i~=j)
% E_smooth_A_temp = sparse(3, 12*n);
E_smooth_A( (count-1)*3+1 : count*3, (i-1)*12 + 1 : (i-1)*12 + 9) = ...
[eye(3)*(V(j,1)-V(i,1)) eye(3)*(V(j,2)-V(i,2)) eye(3)*(V(j,3)-V(i,3))];
E_smooth_A( (count-1)*3+1 : count*3, (j-1)*12 + 1 : (j-1)*12 + 9) = ...
[eye(3)*(V(i,1)-V(j,1)) eye(3)*(V(i,2)-V(j,2)) eye(3)*(V(i,3)-V(j,3))];
count = count + 1;
end
end
end
t = toc;
fprintf('construction for smooth energe completes: %gs\n',t);
end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%conformal%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
if(conformal)
tic
%construct matrix for linear conformal energe
E_lconformal_A = zeros(6*n, 12*n);
E_lconformal_b = zeros(6*n, 1);
for i = 1:n
E_lconformal_A( (i-1)*6 + 1 : i*6, (i-1)*12 + 1 : (i-1)*12 + 9) = ...
[ 1 0 0 0 -1 0 0 0 0;
0 0 0 0 1 0 0 0 -1;
-1 0 0 0 0 0 0 0 1;
0 1 0 1 0 0 0 0 0;
0 0 0 0 0 1 0 1 0;
0 0 1 0 0 0 1 0 0];
end
t = toc;
fprintf('construction for linear conformal energe completes: %gs\n',t);
end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%feature%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
if(feature)
tic
%construct matrix for feature point constraints
feature_matching_pairs = [1:200; 1:200]';
E_feature_A = zeros(3*n, 12*n);
E_feature_b = zeros(3*n, 1);
for i = 1:size(feature_matching_pairs,1)
template_index = feature_matching_pairs(i,1);
target_index = feature_matching_pairs(i,2);
E_feature_A( (template_index-1)*3+1 : template_index*3, (template_index-1)*12+10 : template_index*12) = ...
eye(3);
E_feature_b((template_index-1)*3+1 : template_index*3) = V_target(target_index,:) - V(template_index,:);
end
t = toc;
fprintf('construction for feature point constraints completes: %gs\n',t);
end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%closest%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
if(closest)
tic
%construct matrix for closest point constraints
closest_matching_pairs = [1:200; 1:200]';
E_closest_A = zeros(3*n, 12*n);
E_closest_b = zeros(3*n, 1);
for i = 1:size(closest_matching_pairs,1)
template_index = closest_matching_pairs(i,1);
target_index = closest_matching_pairs(i,2);
E_closest_A( (template_index-1)*3+1 : template_index*3, (template_index-1)*12+10 : template_index*12) = ...
eye(3);
VP = V_target(target_index,:) - V(template_index,:);
Normal = N(template_index,:);
E_closest_b((template_index-1)*3+1 : template_index*3) = dot(VP,Normal).*Normal;
end
t = toc;
fprintf('construction for cloest point constraints completes: %gs\n',t);
end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%total%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
tic
%construct the total system
A=[];
b=[];
if(consist)
A = [A; E_consist_A];
b = [b; E_consist_b];
end
if(smooth)
A = [A; E_smooth_A];
b = [b; E_smooth_b];
end
if(conformal)
A = [A; E_lconformal_A];
b = [b; E_lconformal_b];
end
if(feature)
A = [A; E_feature_A];
b = [b; E_feature_b];
end
if(closest)
A = [A; E_closest_A];
b = [b; E_closest_b];
end
t = toc;
fprintf('construction for total system completes: %gs\n',t);
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%solving%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
tic
%solve the whole system
%T=linsolve(A'*A,A'*b);%7.13842s
T = (A'*A)\(A'*b);%6.63639s
%T=pcg(A'*A,A'*b,1e-12,2000);%9.59388s
%pcg converged at iteration 649 to a solution with relative residual 8.8e-13.
% A = sparse(A);
% b = sparse(b);
% [L,U,P,Q,R] = lu(A);
% T = Q*(U\(L\(P*(R\b))));%0.724697s
t = toc;
fprintf('solving completes: %gs\n',t);
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%update%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
for i = 1:n
V(i,:) = V(i,:) + T((i-1)*12+10 : i*12)';
end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%figure%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
hold on
trimesh(F,V(:,1),V(:,2),V(:,3),'EdgeColor','b');
%trimesh(F_target,V_target(:,1),V_target(:,2),V_target(:,3),'EdgeColor','r');
axis equal
view(3)
disp('done!')
>> acap
construction for consist energe completes: 0.0397842s
construction for smooth energe completes: 0.0420681s
construction for linear conformal energe completes: 0.0217301s
construction for feature point constraints completes: 0.0140695s
construction for cloest point constraints completes: 0.0417374s
construction for total system completes: 1.08451s
solving completes: 4.71639s
done!
>> the figure after running seems like:
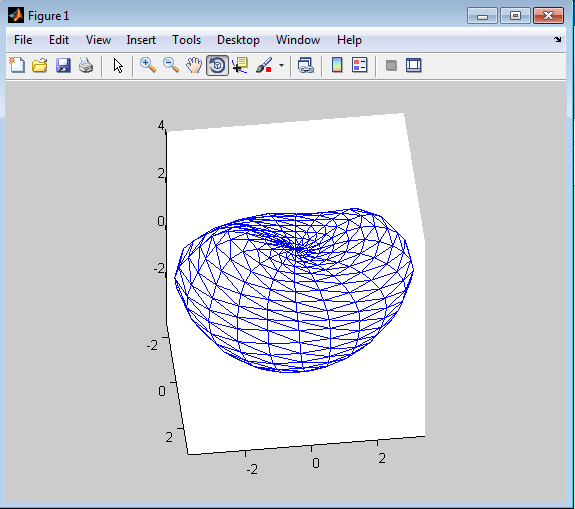














 7699
7699











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









