







The goal is to find
X
such that
Using gradient descent algorithm to obtain the minimum value of the funtion.
let
y=f(x)
Init:
x=x0,y0=f(x0)
, iterative step
α
, convergent precision
ϵ
The ith iterative formula can be expressed as:
xi=xi−1−α∇f(xi−1)
Example: solve the minimum of function f(x)=x2+3x+2
let x0=0 , step \alpha = 0.1, convergent precision ϵ=10−4
f = @(x) x.^2 - 3*x + 2;
hold on
for x=0:0.001:3
plot(x, f(x),'k-');
end
x = 0;
y0 = f(x);
plot(x, y0, 'ro-');
alpha = 0.1;
epsilon = 10^(-4);
gnorm = inf;
while (gnorm > epsilon)
x = x - alpha*(2*x-3);
y = f(x);
gnorm = abs(y-y0);
plot(x, y, 'ro');
y0 = y;
end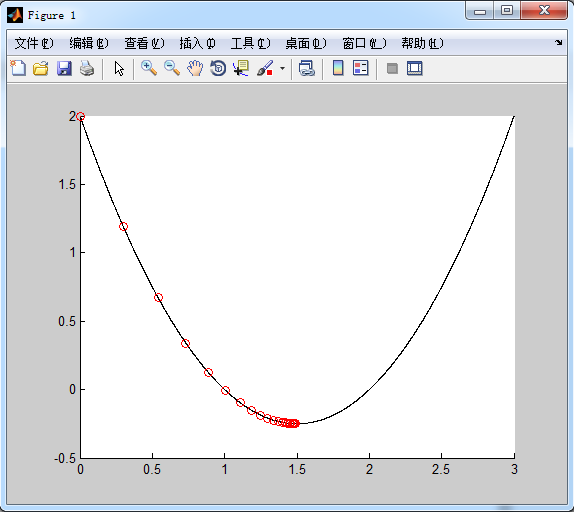
let’s move into multi-variable case, say we have m samples, each sample has n features. X is expressed as:
where
Then X can be denoted as :
Assuming
h(x.)=∑j=1najx.j=xT.a
Here,
Now the objective function is minaf(a)=12(Xa−y)T(Xa−y)
Before the derivation, I would like to introduce some facts:
tr(AB)=tr(BA)
………………………………..(1)
tr(ABC)=tr(BCA)=tr(CAB)
………………………………..(2)
tr(A)=tr(AT)
………………………………..(3)
if
a∈R
,
tr(a)=a
………………………………..(4)
∇Atr(AB)=BT
………………………………..(5)
∇Atr(ABATC)=CAB+CTABT
………………………………..(6)
In order to obtain the critical points of
f(a)
, we take the derivative of
f(a)
w.r.t
a
and set it to be zero.
we can easily get a as follows:
a=(XTX)−1XTy
function [xopt,fopt,niter,gnorm,dx] = grad_descent(varargin)
% grad_descent.m demonstrates how the gradient descent method can be used
% to solve a simple unconstrained optimization problem. Taking large step
% sizes can lead to algorithm instability. The variable alpha below
% specifies the fixed step size. Increasing alpha above 0.32 results in
% instability of the algorithm. An alternative approach would involve a
% variable step size determined through line search.
%
% This example was used originally for an optimization demonstration in ME
% 149, Engineering System Design Optimization, a graduate course taught at
% Tufts University in the Mechanical Engineering Department. A
% corresponding video is available at:
%
% http://www.youtube.com/watch?v=cY1YGQQbrpQ
%
% Author: James T. Allison, Assistant Professor, University of Illinois at
% Urbana-Champaign
% Date: 3/4/12
if nargin==0
% define starting point
x0 = [3 3]';
elseif nargin==1
% if a single input argument is provided, it is a user-defined starting
% point.
x0 = varargin{1};
else
error('Incorrect number of input arguments.')
end
% termination tolerance
tol = 1e-6;
% maximum number of allowed iterations
maxiter = 1000;
% minimum allowed perturbation
dxmin = 1e-6;
% step size ( 0.33 causes instability, 0.2 quite accurate)
alpha = 0.1;
% initialize gradient norm, optimization vector, iteration counter, perturbation
gnorm = inf; x = x0; niter = 0; dx = inf;
% define the objective function:
f = @(x1,x2) x1.^2 + x1.*x2 + 3*x2.^2;
% plot objective function contours for visualization:
figure(1); clf; ezcontour(f,[-5 5 -5 5]); axis equal; hold on
% redefine objective function syntax for use with optimization:
f2 = @(x) f(x(1),x(2));
% gradient descent algorithm:
while and(gnorm>=tol, and(niter <= maxiter, dx >= dxmin))
% calculate gradient:
g = grad(x);
gnorm = norm(g);
% take step:
xnew = x - alpha*g;
% check step
if ~isfinite(xnew)
display(['Number of iterations: ' num2str(niter)])
error('x is inf or NaN')
end
% plot current point
plot([x(1) xnew(1)],[x(2) xnew(2)],'ko-')
refresh
% update termination metrics
niter = niter + 1;
dx = norm(xnew-x);
x = xnew;
end
xopt = x;
fopt = f2(xopt);
niter = niter - 1;
% define the gradient of the objective
function g = grad(x)
g = [2*x(1) + x(2)
x(1) + 6*x(2)];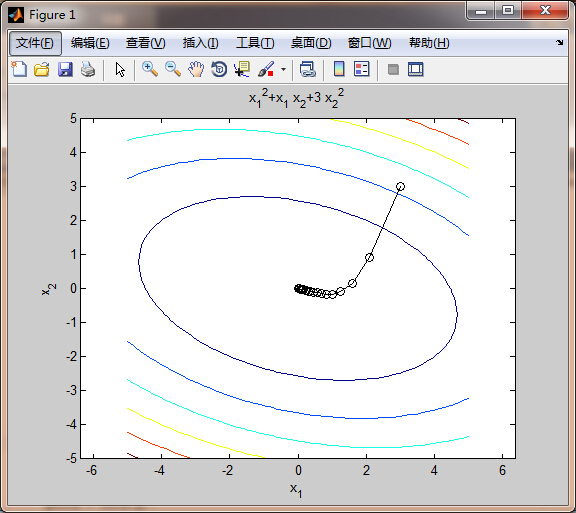
function [xopt,fopt,niter,gnorm,dx] = grad_descent(varargin)
if nargin==0
% define starting point
x0 = [3 3]';
elseif nargin==1
% if a single input argument is provided, it is a user-defined starting
% point.
x0 = varargin{1};
else
error('Incorrect number of input arguments.')
end
% termination tolerance
tol = 1e-6;
% maximum number of allowed iterations
maxiter = 1000;
% minimum allowed perturbation
dxmin = 1e-6;
% step size ( 0.33 causes instability, 0.2 quite accurate)
alpha = 0.1;
% initialize gradient norm, optimization vector, iteration counter, perturbation
gnorm = inf; x = x0; niter = 0; dx = inf;
% define the objective function:
f = @(x1,x2) x1.^2 + x1.*x2 + 3*x2.^2;
m = -5:0.1:5;
[X,Y] = meshgrid(m);
Z = f(X,Y);
% plot objective function contours for visualization:
figure(1); clf; meshc(X,Y,Z); hold on
% redefine objective function syntax for use with optimization:
f2 = @(x) f(x(1),x(2));
% gradient descent algorithm:
while and(gnorm>=tol, and(niter <= maxiter, dx >= dxmin))
% calculate gradient:
g = grad(x);
gnorm = norm(g);
% take step:
xnew = x - alpha*g;
% check step
if ~isfinite(xnew)
display(['Number of iterations: ' num2str(niter)])
error('x is inf or NaN')
end
% plot current point
plot([x(1) xnew(1)],[x(2) xnew(2)],'ko-')
plot3([x(1) xnew(1)],[x(2) xnew(2)], [f(x(1),x(2)) f(xnew(1),xnew(2))]...
,'r+-');
refresh
% update termination metrics
niter = niter + 1;
dx = norm(xnew-x);
x = xnew;
end
xopt = x;
fopt = f2(xopt);
niter = niter - 1;
% define the gradient of the objective
function g = grad(x)
g = [2*x(1) + x(2)
x(1) + 6*x(2)];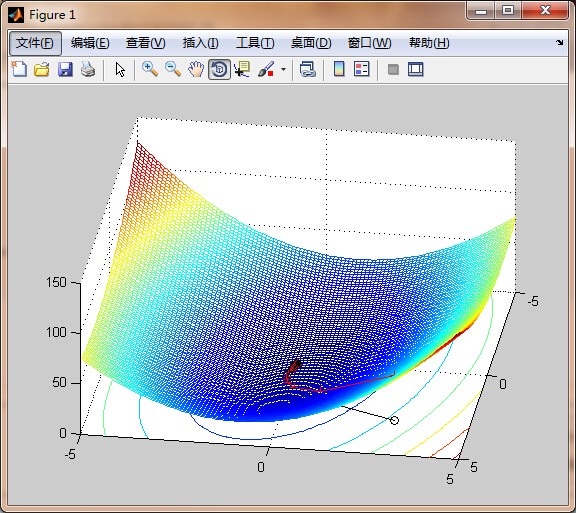















 1460
1460











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









