







1) 图1, 先通过discriptor算出每点的值, 然后算出function map,即matrix C C . 左图是说明discriptor每有区分左右, 中图加了对应约束使其左右交换, 右图为了说明function map满足代数运算, 左图减去中图就得到保方向的function map
2) section 4
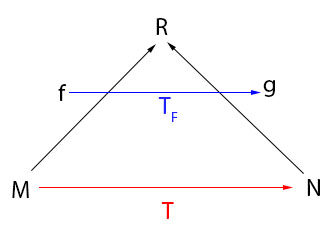
注意 是从manifold上面到实数的函数, T,T−1 T , T − 1 是从一个manifold到另一个manifold人映射, TF,T−1F T F , T F − 1 是从一个函数到另一个函数的映射。
TF(f)=g=f∘T−1 T F ( f ) = g = f ∘ T − 1
3) Note that
C
C
has a particularly …
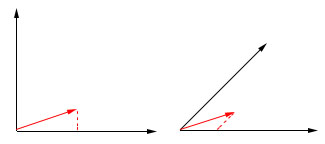
只有正交的时候内积才是投影
4) 图2主要说明near-isometric maps 的funtion map是一个稀疏,大体对角的矩阵。
5) 5.1 Indeed, … applications.
基为每点单色, 但是基的数量会很多, 并不compact. 然后图3阐述了不同数量的eigenvector作为基,最后得到的平均geodesic error.
关键句: maps that correspond to bigger deformations require more basis vectors, capturing the intuition that near-isometric maps are more compactly represented.
Note that the eigenfunctions of the unweighted discretization of Laplace-Beltrami operator provide a more compact representation of the map for the same quality of reconstruction.
6) 图4主要说明near-isometric maps induce matrices that are nearly sparse
the functional matrix
C
C
stops being diagonal very quickly under even mild non-isometric deformations.
7) 图5主要说明functional representation的连续性, 这里通过插值的方式表现出来
8) 5.3讲各种constraints
9) Theorem5.1 看后面附录的证明,
Dj,i=<SF(ϕNj),ϕMi>=∫MϕNj∘T(x)ϕM(x)μM(x)
D
j
,
i
=<
S
F
(
ϕ
j
N
)
,
ϕ
i
M
>=
∫
M
ϕ
j
N
∘
T
(
x
)
ϕ
M
(
x
)
μ
M
(
x
)
里面积分式一样, 外面体积一样, 所以 C=DT C = D T
10) 6.1 事件复杂度,建树 O(VNlogVN) O ( V N l o g V N ) , 查找 O(VMlogVN) O ( V M l o g V N )
这里我想说说如何从函数的映射关系推导出点对点的映射关系,
注意看
δ
δ
函数在基下面的映射
δx=limt→∞e−tλiϕMi(x)ϕNi(⋅)
δ
x
=
l
i
m
t
→
∞
e
−
t
λ
i
ϕ
i
M
(
x
)
ϕ
i
N
(
⋅
)
,
推导见【A Concise and Provably Informative Multi-Scale Signature
Based on Heat Diffusion】
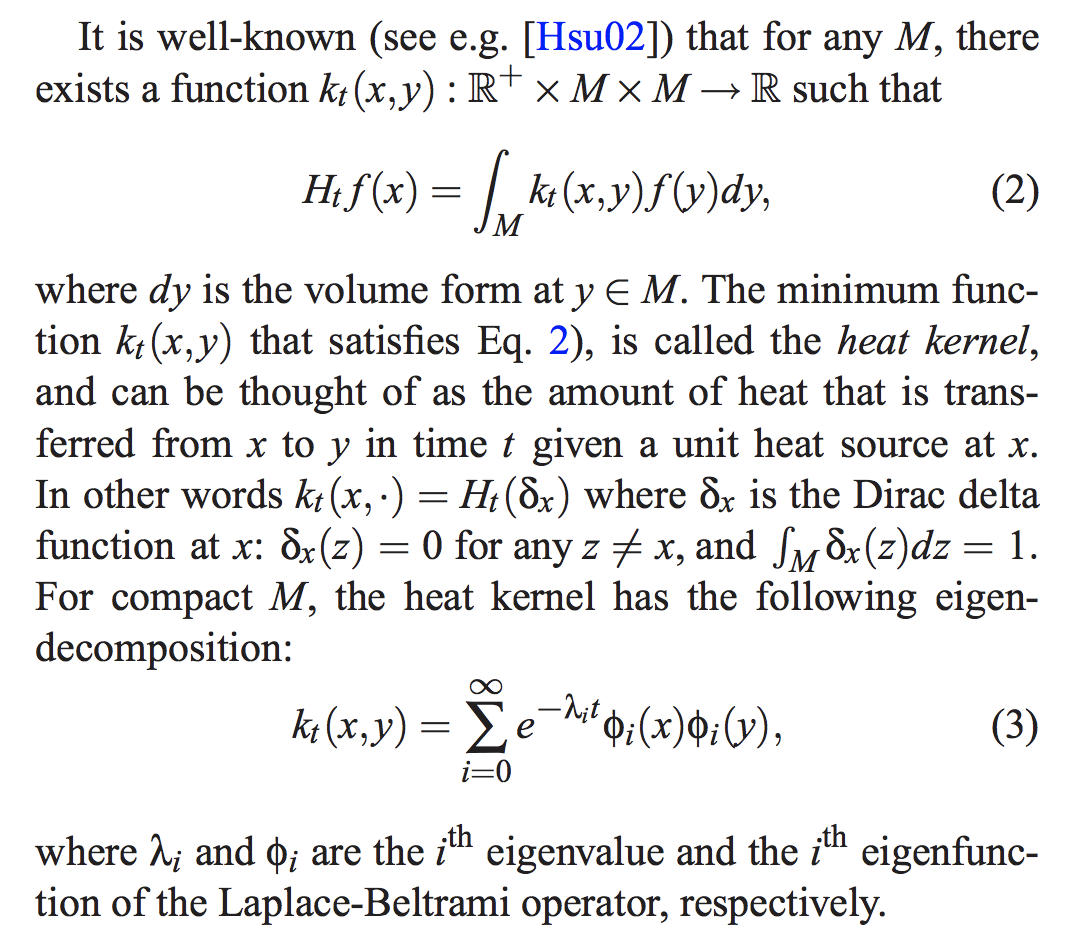
当 t→0 t → 0 时, e−tλi e − t λ i 趋于1, 所以在点x处的 δ δ 函数在Laplacian-Beltrami基下面( BM×VM B M × V M , BM B M 为LB基的数量)的系数为 ϕMi(x) ϕ i M ( x ) ,即矩阵 ϕ ϕ 第x列,该系数向量共有 BM B M 个。
然后矩阵 C C 是将维的系数转到 BN B N 维上的系数, (假设的 C C 维数是, 根据需要自己转置, 反正就是从一个基的维度转到另一个基的维度),然后这里的系数刚好又是 ϕM ϕ M .
后面那个公式说明函数的差值跟系数差值成正比, 所以为了找出M上一点x对应于N上的某一点, 只需要找出 δx δ x 的系数,然后通过矩阵 C C ,转到N下面的系数, 再于N下面函数的系数作比较, 找出系数差距最小, 即找到了函数值差距最小。
整个过程是,对于M上的某一点x, 其 δx δ x 函数即在M的LB基下面的系数为 ϕM(x) ϕ M ( x ) , 转到N的LB基下的系数为 CϕMi(x) C ϕ i M ( x ) ,该向量为 BN×1 B N × 1 维,然后与N的LB基的每一列 ϕN(y) ϕ N ( y ) 算距离( ϕN ϕ N 的维数为 BN×VN B N × V N ),距离出最小的第y列,即为x的对应点。
11) 图6 说明他的方法比别人牛逼,竖轴为匹配部分的百分比
12) 图7 说明maps跟mesh的拓扑结构无关, 这里只用了x,y,z的坐标信息然后分别渲染到R,G,B通道
13) 图8说明他们的方法能帮别人提升(通过6.2), 图9也是
14) 8.2是说一堆shape(shape collection)的匹配问题, 图10 a是原始错误, b是运行ICSM后的错误, c用diffusion运行在ICSM结果上。图11也是
15)说明segmentation的方法, 对于原模型的segmentation,每个区域用一个indicator function,然后转移到新的模型上
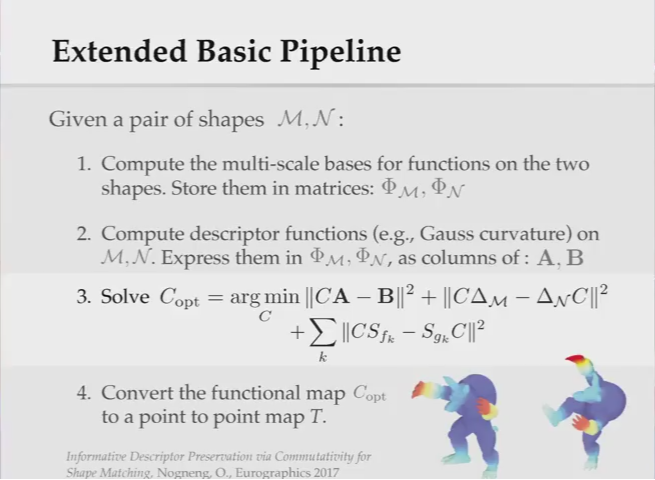
第一项是求funtional map C C , 第二项是保isometric, 第三项是operator commutativity
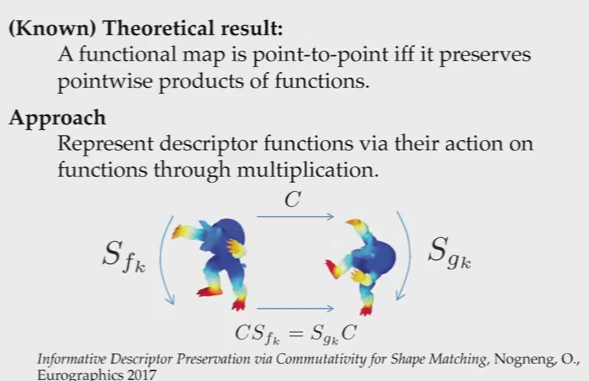
注意这里和 Sgk S g k 是从一个函数变到另一个函数, 并且这两个函数都是作用于同一个manifold















 753
753

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









