







IGH主站&&从站控制代码流程
1.EtherCAT介绍:机器人控制LinuxCNC与EtherCAT介绍&&PDO&SDO,搭建环境步骤
2.安装IGH主站:linux系统学习笔记7——一次性安装igh-ethercat主站
3.c语言控制:IGH主站通信测试csp模式(DC同步 preemrt)连通一从站并实现控制
| 主站通信的必要流程 |
| MAIN函数主要分为两个线程,一个负责通信,一个负责操作电机急停,增减速度等 |
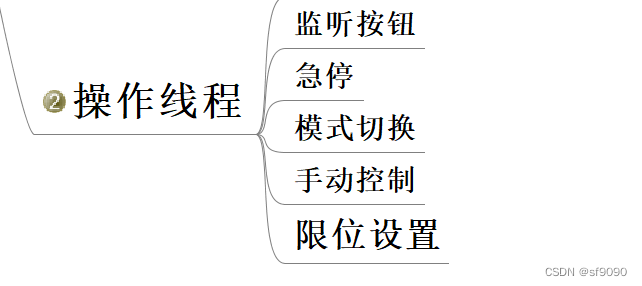
| 操作线程设置 |
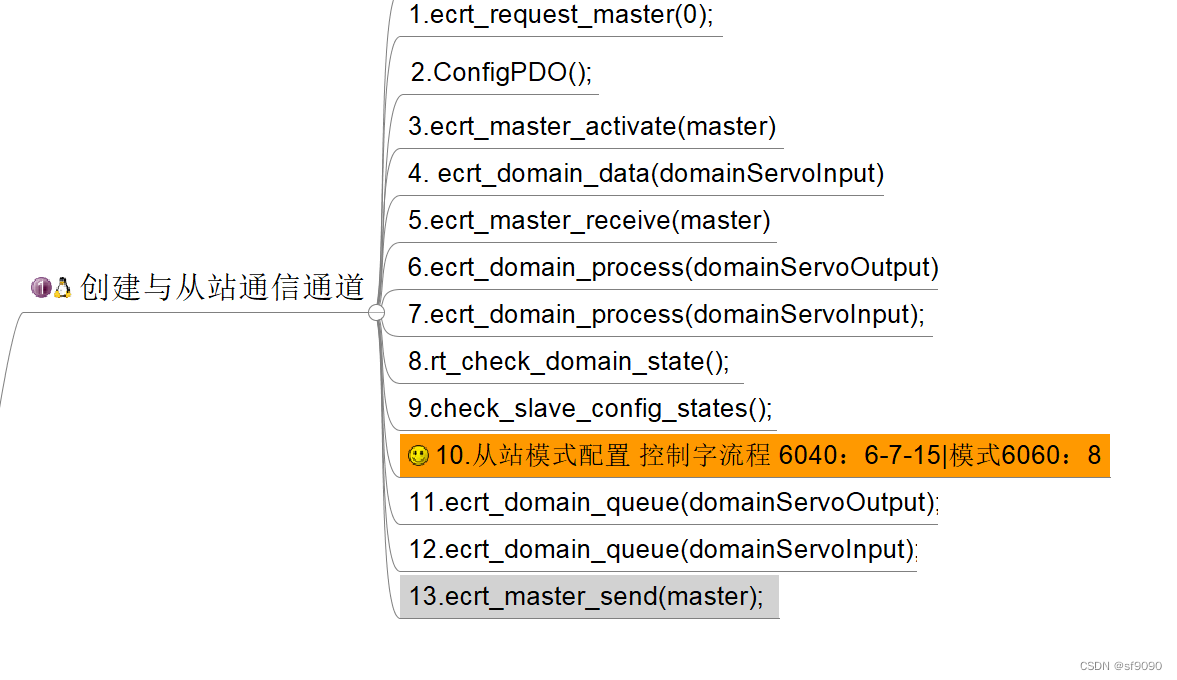
| 通信线程流程 |
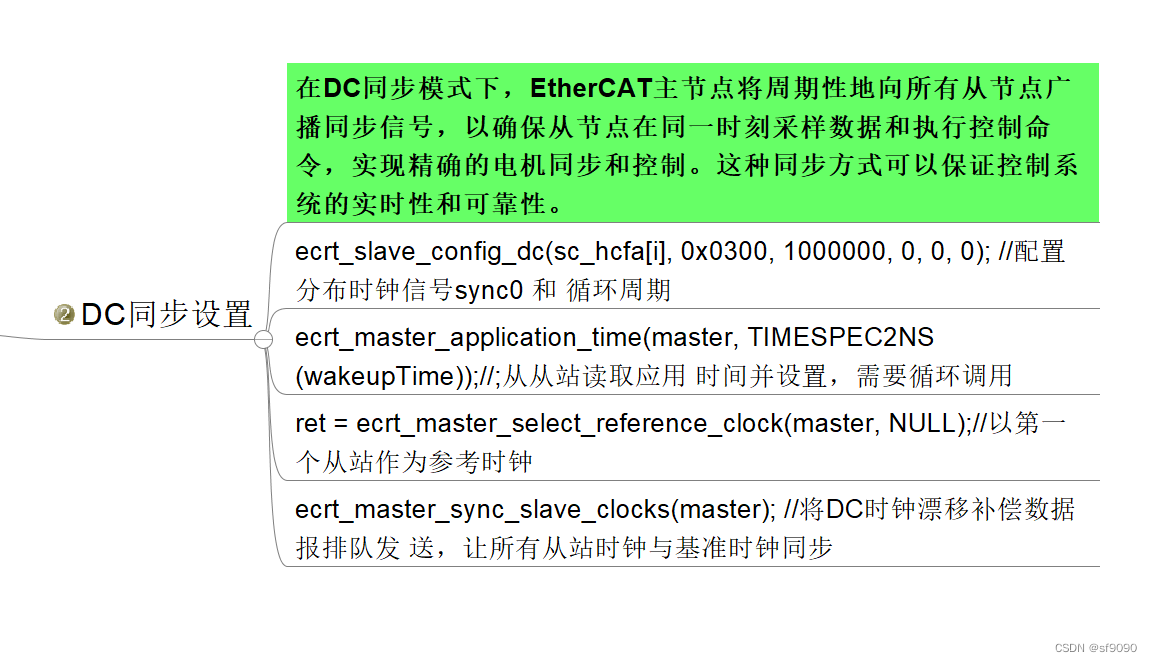
| DC同步设置 |

| 【关注微信公众号一起来交流】 |



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











