






 本文介绍了EKF/INS-GPS松组合导航技术,通过IMU和GPS数据融合,利用15状态变量和NED坐标系提高导航精度。该技术在航空航天、无人机等领域有广泛应用,有望推动定位技术发展。
本文介绍了EKF/INS-GPS松组合导航技术,通过IMU和GPS数据融合,利用15状态变量和NED坐标系提高导航精度。该技术在航空航天、无人机等领域有广泛应用,有望推动定位技术发展。
EKF INS/GPS松组合导航,15状态,地理系采用NED(北东地)
ID:38650730223417186
喜欢撸代码的博士僧
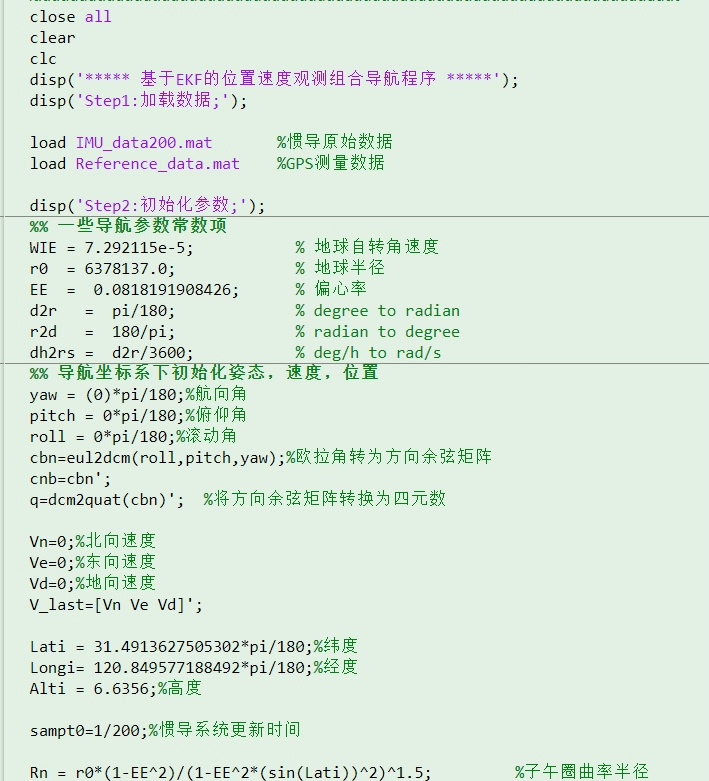
EKF INS GPS松组合导航,15状态,地理系采用NED(北东地)
随着现代定位技术的快速发展,精准导航已经成为许多领域的必需品。在实际导航过程中,传统的导航方式往往会受到各种干扰和误差的影响,导致导航精度下降。为了解决这一问题,EKF(Extended Kalman Filter)INS(Inertial Navigation System)GPS(Global Positioning System)松组合导航技术应运而生。
EKF INS GPS松组合导航技术以惯性测量单元(IMU)和全球定位系统(GPS)为主要输入源,通过结合两者的优势,提供更高精度、更可靠的导航解决方案。其中,地理系采用NED(北东地)坐标系,进一步简化了导航计算的工作量。
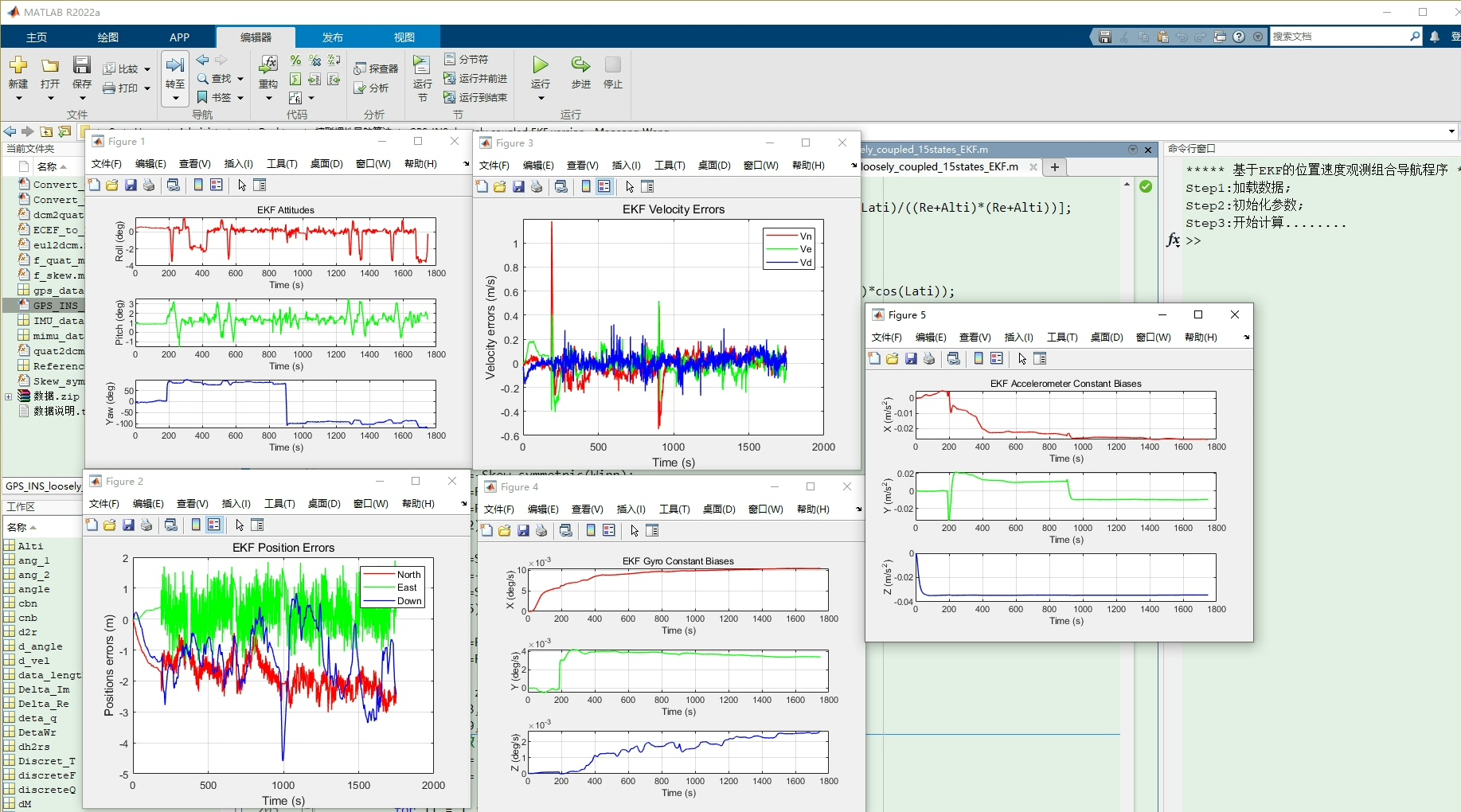
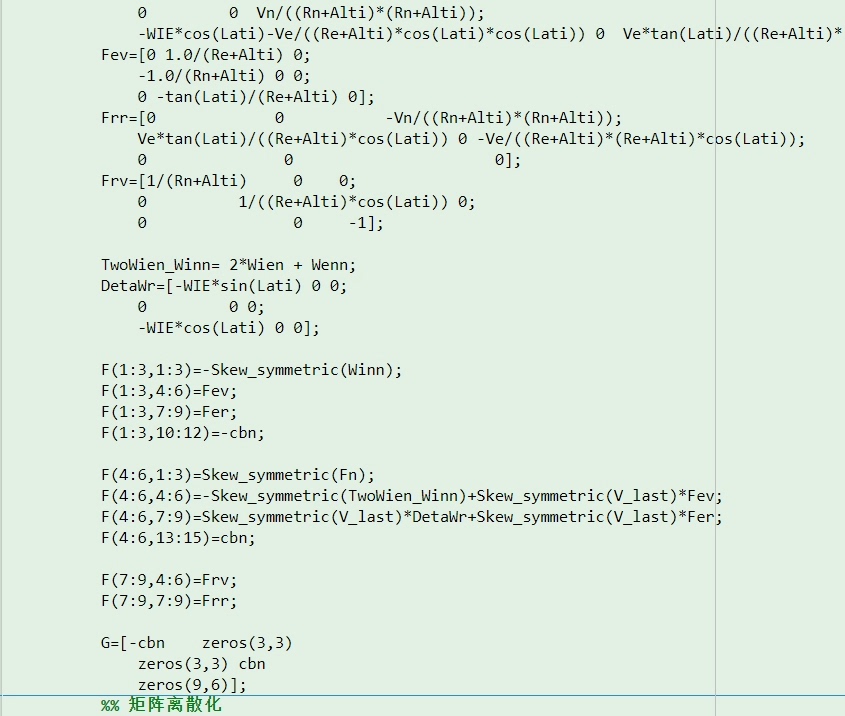
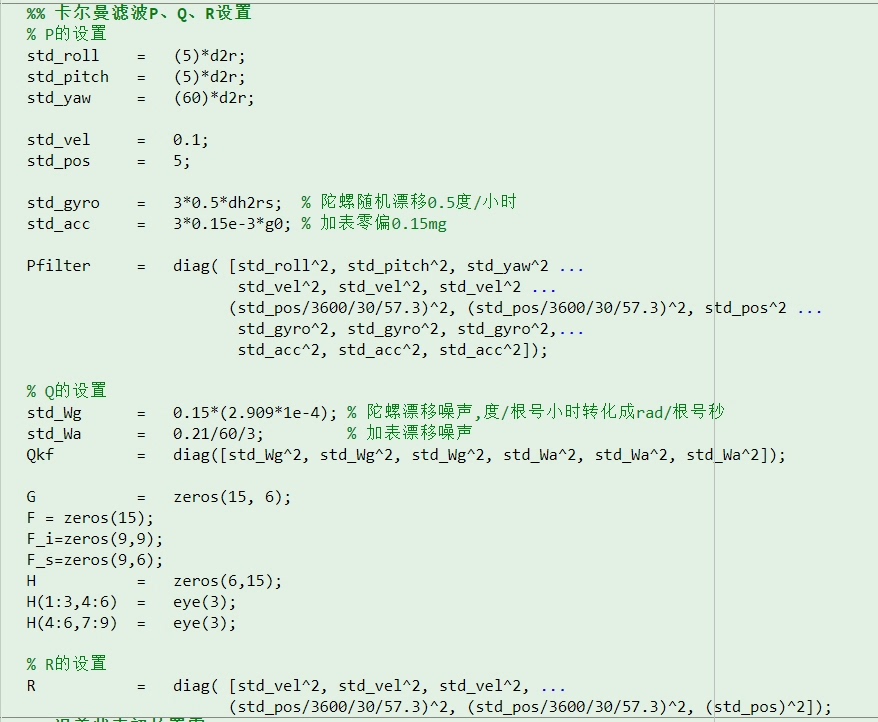
EKF是一种扩展卡尔曼滤波器,广泛应用于导航领域。它通过融合多个状态量的测量结果,对系统状态进行实时估计和校正,从而提高导航精度。在EKF INS GPS松组合导航中,常采用15个状态变量来描述整个导航系统,包括位置、速度、姿态、偏航角等。通过对这些状态变量进行预测和观测更新,可以实现导航过程中的误差补偿和精度提升。
其中,IMU是导航系统的关键组件之一,它通过内部的加速度计和陀螺仪对运动状态进行测量。IMU的输出结果常常受到漂移、噪声等因素的干扰,导致导航解算的不稳定性。而GPS作为一种全球定位系统,可以提供全球范围内的高精度定位信息,但在某些特定环境下(如城市峡谷地带、建筑物遮挡区域等),GPS信号容易受到干扰,导致定位精度下降。因此,将IMU和GPS的信息进行优化整合,可以充分发挥两者的优势,提高导航精度和鲁棒性。
在EKF INS GPS松组合导航中,地理系采用NED坐标系的优势主要体现在两个方面。首先,NED坐标系与地球表面的实际运动方向一致,便于理解和描述导航系统状态。其次,NED坐标系可以直接使用外部地理信息,如地形高度、地球引力等,进一步提高导航计算的准确性。通过采用NED地理系,EKF INS GPS松组合导航技术能够更加贴合实际应用场景,并提供更精确、稳定的导航解算结果。
综上所述,EKF INS GPS松组合导航技术以其优秀的导航性能在航空航天、无人机、水下机器人等领域得到了广泛的应用。通过融合IMU和GPS的信息,利用EKF算法对导航系统状态进行估计和校正,提高了导航精度和鲁棒性。地理系采用NED坐标系的选择,进一步简化了导航计算的复杂性,并提供了更贴合实际的导航解算结果。未来,随着定位技术的不断改进和发展,EKF INS GPS松组合导航技术有望在更多领域发挥重要作用,为社会的发展和进步做出更大的贡献。
【相关代码 程序地址】: http://nodep.cn/730223417186.html















 2302
2302











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









