









服务配置支持按需配置服务,并根据业务场景,支持多种增值服务。当前支持的增值服务包括启动控制、按需启动、命令执行、定时启动、fd代持、**沙盒**。
基本概念
-
init服务参数选项列表
-
init会根据用户的服务配置,把服务分成三类,在不同的阶段并行启动。
- “boot”类型:对应系统中需要优先启动的服务,该类服务在“init”阶段启动。
- “normal”类型:默认配置,对应系统中的普通服务,该类服务在“post-init"阶段启动。
- “condition”类型:必须通过启动命令启动,通过在jobs中添加“start xxxx”来启动对应服务。
-
init提供服务命令执行能力,在服务执行的不同阶段执行不同的命令。
- "on-start":在服务进程被fork后在子进程中执行,只对该进程产生影响。
- "on-stop":在服务停止时执行,在init进程中执行。
- "on-restart":在服务重启时执行,在init进程中执行。
参考配置如下:
"services" : [{ "name" : "serviceName", "path" : ["/system/bin/serviceName"] "jobs" : { "on-boot" : "boot", "on-start" : "services:serviceName_start", "on-stop" : "services:serviceName_stop", "on-restart" : "services:serviceName_restart" } },通过并行启动和命令执行能力,可以实现进程的并行启动。
-
配置按需启动后,init进程不会启动对应的服务,只有服务被需要时才会被拉起。通过"ondemand"标记来控制服务是否被拉起。
“ondemand”参考配置如下:
"services" : [{ "name" : "serviceName", "path" : ["/system/bin/serviceName"] "ondemand" : true }]-
SA进程按需启动
具体参考 **samgr组件(说明3)**。
-
socket进程按需启动
- init进程在pre-fork阶段为socket类进程创建好socket,init进程中监听创建好的socket上的读写事件。
- socket上有读写事件后,init进程拉起socket进程对应的native服务,并取消对socket的监听,将socket交由相应的native服务管理。
- native服务无报文处理后,可以自动退出。init进程在回收子进程时会根据服务配置重新监听socket。
-
热插拔服务进程按需启动
进程可根据系统参数的变化进行热插拔事件按需启动处理。
-
-
init进程启动&回收能力增强
进程启动时,支持在配置文件中配置服务进程的绑核、优先级、MAC信息以及AccessToken信息。
- init提供修改*.cfg配置文件,为服务进程提供CPU绑核功能。
- init提供修改*.cfg配置文件,为服务进程提供优先级设置。
- init提供修改*.cfg配置文件,为服务提供MAC信息设置,即服务的SELinux标签(需要selinux支持)。
- init提供修改*.cfg配置文件,为服务提供设置AccessToken, 为系统服务进程设置其分布式Capability能力(仅标准系统以上提供)。
- init提供修改*.cfg配置文件,为服务提供抑制机制。
服务进程启动&回收能力增强配置,如下:
"services" : [{ "name" : "serviceName", "path" : ["/system/bin/serviceName"] "importance" : 1, // 服务进程提供优先级设置 "cpucore" : [0], // 服务进程提供CPU绑核功能 "critical" : [1, 5, 10], // 服务提供抑制机制 "apl" : "normal", // 系统服务进程设置其分布式Capability能力 "d-caps" : ["OHOS_DMS"], // 系统服务进程设置其分布式Capability能力 "secon" : "u:r:distributedsche:s0" // 服务的SELinux标签, "u:r:distributedsche:s0"为要设置的SELinux标签信息 } -
添加selinux标签
服务配置selinux策略,需要通过"secon"为服务添加selinux标签。例如为watchdog_service添加selinux标签,如下:
"services" : [{ "name" : "watchdog_service", "secon" : "u:r:watchdog_service:s0" }]对应的需要在selinux中定义此标签,定义方法与配置文件参照selinux指导文档
-
init FD代持(仅标准系统以上提供)
FD代持是按需启动的一个辅助扩展机制,按需启动进程可以保持退出前的fd状态句柄不丢失。按需启动进程退出前可将fd发送给init代持,再次启动后再从init获取fd。
init提供了相关接口供服务调用,服务进程退出前调用接口将fd通过支持IPC通信的socket发送给init代持,待该服务重新启动时,init将持有的该服务相关的fd句柄通过同样的方式返回给服务。
-
定时启动
通过约定时间拉起服务, 若服务已拉起, 则不在重新拉起服务。
timer_start servicename timeout -
沙盒
具体参考 **沙盒指导**。
约束与限制
仅限小型系统、标准系统下使用。
开发指导
场景介绍
通过对*.cfg文件的解析, 获取service中的属性, 设置并启动service。
参数说明
表1 service字段说明 | 字段名 | 支持系统类型 | 字段说明 | 字段解释 | | ---------- |-------- | --------| --------| | name | 小型系统和标准系统 | 当前服务的服务名。(必选) | 类型:字符串; 服务名非空且长度<=32字节。| | path | 小型系统和标准系统 | 当前服务的可执行文件全路径和参数,数组形式。 (必选) | 确保第一个数组元素为可执行文件路径、数组元素个数<=20。
每个元素为字符串形式以及每个字符串长度<=64字节。| | uid | 小型系统和标准系统 | 当前服务进程的uid值。 | 类型:int、字符串。 | | gid | 小型系统和标准系统 | 当前服务进程的gid值。 | 类型:int、int[]、字符串、字符串数组。 | | once | 小型系统和标准系统 | 当前服务进程是否为一次性进程。 | 1:一次性进程,当该进程退出时,init不会重新启动该服务进程。
0 : 常驻进程,当该进程退出时,init收到SIGCHLD信号并重新启动该服务进程。 | | importance | 小型系统和标准系统 |
标准系统:当前服务优先级
小型系统:标记服务重要性 |
标准系统中: 服务优先级取值范围 [-20, 19],超出为无效设置。
小型系统中:0 : 不重启系统;非0 : 重启系统 | | caps | 小型系统和标准系统 | 当前服务所需的capability值,根据安全子系统已支持的capability,评估所需的capability,遵循最小权限原则配置。| 类型:数字或者字符串数组,在配置数字时,按linux标准的capability进行配置。字符串时,使用标准定义的宏的名字进行配置。 | | critical | 标准系统 | 为服务提供抑制机制,服务在配置时间 T 内,频繁重启次数超过设置次数 N 重启系统。 |
标准系统中: 类型:int[],如:"critical" : [M, N, T],
其中M:使能标志位(0:不使能;1:使能), N:频繁拉起服务次数, T:时间(单位:秒)。M > 0; N > 0。
小型系统中 & 标准系统中:类型:int,如:"critical" : M,
其中 M:使能标志位(0:不使能;1:使能)。 默认拉起服务次数:4次, 时间:20秒 。| | cpucore | 标准系统 | 服务需要的绑定的CPU核心数 | 类型:int型数组, 如"cpucore" : [N1, N2, ...], N1, N2均为需要绑定的cpu核索引, 如单核设备 cpucore : [0]。 | | d-caps | 标准系统 | 服务分布式能力。| 类型:字符串数组, 如 "d-caps" : ["OHOS_DMS"]。 | | apl | 标准系统 | 服务能力特权级别。 | 类型:字符串, 如 "apl" : "system_core"。
目前支持"system_core"(默认值), "normal", "system_basic"。 | | start-mode | 标准系统 | 服务的启动模式。 | 类型:字符串, 如 "start-mode" : "condition"。
目前支持"boot", "normal", "condition"。具体说明参考:init服务启动控制。 | | ondemand | 小型系统和标准系统 | 按需启动服务的标志。 | 类型:bool,如"ondemand" : true,小型系统只在Linux内核上支持。
具体说明参考:init服务按需启动。| | disable | 小型系统和标准系统 | 预留字段,无实际意义。 | 无。 | | sandbox | 标准系统 | 沙盒功能是否打开。 | 1:打开服务的沙盒功能 (默认值)。
0:关闭服务的沙盒功能。 |
表2 socket字段说明 | 字段名 | 说明 | | -------- | -------- | | name | 当前socket的命名,不要求必须与服务同名,与服务名同样须满足非空且长度<=32字节。| | family | socket所属的地址族,目前支持的为服务创建的socket有AF_UNIX和AF_NETLINK族。| | type | socket的类型,目前支持的类型有基于连接的SOCK_SEQPACKET和SOCK_STREAM,还有基于UDP无连接的SOCK_DGRAM。| | protocol | socket通信遵循的协议类型,在无特殊需求的情况下,该值可配置为default缺省值,因为socket接口会自动根据socket地址族和类型选择合适的协议。此处除了default,并且支持NETLINK_KOBJECT_UEVENT协议类型。| | permissions | socket节点文件的权限。此项配置仅对如AF_UNIX地址族等有实体节点文件的socket类型有效。| | uid | socket节点文件的用户ID。此项配置仅对如AF_UNIX地址族等有实体节点文件的socket类型有效。| | gid | socket节点文件的组ID。此项配置仅对如AF_UNIX地址族等有实体节点文件的socket类型有效。| | option | socket的可选配置。在调用setsockopt接口时传入设置,目前支持的option选项有SOCKET_OPTION_PASSCRED、SOCKET_OPTION_RCVBUFFORCE、SOCK_CLOEXEC和SOCK_NONBLOCK。|
接口说明
表3 FD代持接口介绍 | 函数名 | 函数解释 | 参数解释 | | ---------- | ---------- |--------| | int *ServiceGetFd(const char *serviceName, size_t *outfdCount) | 获取init代持的fd | 返回值:成功返回fd数组指针,失败返回NULL。备注:需手动释放
参数:
serviceName: 服务名
outfdCount: 返回的fd数组长度 | | int ServiceSaveFd(const char *serviceName, int *fds, int fdCount) | 请求init代持fd | 返回值:成功返回0,失败返回-1
参数:
serviceName: 服务名
fds: 需要init代持的fd数组指针
fdCount: fd数组长度 | int ServiceSaveFdWithPoll(const char *serviceName, int *fds, int fdCount) | 使用poll方式,请求fd代持 | 返回值:成功返回0,失败返回-1
参数:
serviceName: 服务名
fds: fd代持数组指针
fdCount 数组长度
表4 服务控制接口介绍 | 函数名 | 函数解释 | 参数解释 | | :---------- | :---------- |:--------| | int ServiceControlWithExtra(const char *serviceName, int action, const char *extArgv[], int extArgc) | 配置服务参数 | 返回值:成功返回0,失败返回-1
参数:
serviceName: 服务名
action: 服务行为("start", "stop", "restart")
extArgv: 参数数组
extArgc: 参数个数 | | int ServiceControl(const char *serviceName, int action) | 控制服务行为 | 返回值:成功返回0,失败返回-1
参数:
serviceName: 服务名
action: 服务行为("start", "stop", "restart") | | int ServiceWaitForStatus(const char *serviceName, ServiceStatus status, int waitTimeout) | 等待服务状态 | 返回值:成功返回0, 失败返回-1。
参数:
serviceName: 服务名
status: 返回服务状态
超时时间 | | int ServiceSetReady(const char *serviceName) | 设置服务准备 | 返回值:成功返回0,失败返回-1
参数:
serviceName: 服务名 | | int StartServiceByTimer(const char *serviceName, uint64_t timeout) | 定时启动服务 | 返回值:成功返回0,失败返回-1
参数:
serviceName: 服务名
timeout: 超时时间 | | int StopServiceTimer(const char *serviceName) | 停止服务计时器 | 返回值:成功返回0,失败返回-1
参数:
serviceName: 服务名 |
-
服务控制接口的DAC配置
服务控制接口配置DAC,需要修改/base/startup/init/services/etc/group文件,在组servicectrl中添加对应的用户id,例如:
servicectrl:x:1050:root,shell,system,samgr,hdf_devmgr -
服务控制接口的selinux配置
服务控制接口配置selinux,需要在init.te文件中添加该服务接口所需要的selinux权限,例如为init、samgr、hdf_devmgr等服务配置系统参数写权限:
allow { init samgr hdf_devmgr } servicectrl_param:parameter_service { set };
开发步骤
此处以要新增一个名为MySystemApp的系统服务为例进行说明,使用如下配置:
{
"jobs" : [{
"name" : "pre-init",
"cmds" : [
"mkdir /storage/MyDir", // MySystemApp服务启动之前需要先创建文件夹,因此放在 “pre-init”中进行
"chmod 0600 /storage/MyDir", // MySystemApp服务要求该文件夹只有本用户和属组才可读写,因此需要修改权限
"chown 10 10 /storage/MyDir"
]
}, {
"name" : "init",
"cmds" : [
"start MySystemApp" // 在init中启动该系统服务
]
}, {
"name" : "post-init",
"cmds" : [] // MySystemApp系统服务启动后无需进行其他操作,因此不用配置“post-init”
}
],
"services" : [{
"name" : "MySystemApp", // 系统服务名称
"path" : ["/bin/MySystemAppExe", "param1", "param2", "param3"], // MySystemApp系统服务的可执行文件路径为"/bin/MySystemAppExe",其启动需要传入三个参数,分别是"param1"、"param2"和"param3
"socket" : [{
"name" : "ueventd",
"family" : "AF_NETLINK",
"type" : "SOCK_DGRAM",
"protocol" : "NETLINK_KOBJECT_UEVENT",
"permissions" : "0660",
"uid" : "system",
"gid" : "system",
"option" : [
"SOCKET_OPTION_PASSCRED",
"SOCKET_OPTION_RCVBUFFORCE",
"SOCK_CLOEXEC",
"SOCK_NONBLOCK"
]
}],
"uid" : 20, // MySystemApp系统服务的uid是20
"gid" : 20, // MySystemApp系统服务的gid是20
"once" : 0, // MySystemApp系统服务的非一次性进程,即如果MySystemApp系统服务因任何原因退出,init进程需要将其重新拉起
"importance" : 0, // MySystemApp系统服务不是关键系统进程,即如果MySystemApp系统服务因任何原因退出,init进程无需重启单板
"caps" : [], // MySystemApp系统服务不需要任何capability权限(即MySystemApp系统服务不涉及与capability相关的操作)
"start-mode" : "condition",
"critical": [1, 2, 10], //MySystemApp系统服务的critical配置,需传入三个参数, 分别为使能:1, 执行次数:2, 执行时间:10
"cpucore" : [0, 1], // 设备为双核, 且都绑定cpu
"apl" : "system_core",
"d-caps" : ["OHOS_DMS"],
"jobs" : {
"on-boot" : "boot",
"on-start" : "services:MySystemApp_start",
"on-stop" : "services:MySystemApp_stop",
"on-restart" : "services:MySystemApp_restart"
}
}
]
}完成配置后,编译出包烧写单板:
- 启动后使用task -a(liteos-a版本)或ps命令(linux版本)查看是否MySystemApp系统服务进程已启动。
- 使用kill命令将上述新增的MySystemApp进程杀死,观察该进程是否会被重新拉起(此处应该为重新拉起)。
- 使用kill命令将上述新增的MySystemApp进程杀死,观察是否会导致单板重启(此处应该为不重启)。
常见问题
服务不存在
现象描述
kernel日志打印 "Failed get servName"。
原因分析
在init中查找对应的代码位置,发现是服务不存在。
解决方法
- 确认服务是否在cfg中正确配置。
- 服务的cfg文件是否正常加载。
- cfg文件格式是否正确。
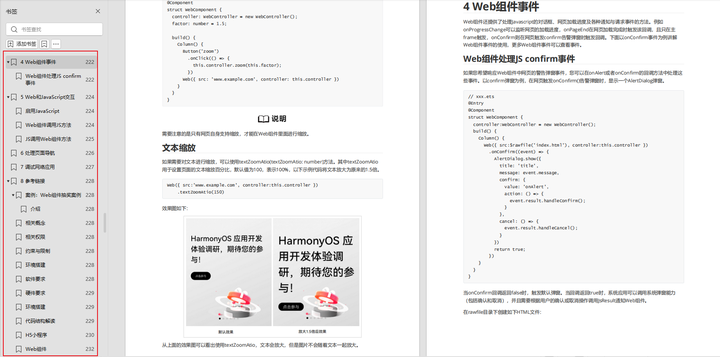
请求其他服务代持fd,init有报错
现象描述
kernel日志打印 "Service ' xxx '(pid = xxx) is not valid or request with unexpected process(pid = xxx)"。
原因分析
kernel日志打印,都是由init 打印。在init中查找对应的代码位置。发现是其他服务代持fd。
解决方法
只支持代持本服务的fd,不允许让其他服务代持fd。
最后
有很多小伙伴不知道学习哪些鸿蒙开发技术?不知道需要重点掌握哪些鸿蒙应用开发知识点?而且学习时频繁踩坑,最终浪费大量时间。所以有一份实用的鸿蒙(HarmonyOS NEXT)资料用来跟着学习是非常有必要的。
这份鸿蒙(HarmonyOS NEXT)资料包含了鸿蒙开发必掌握的核心知识要点,内容包含了(ArkTS、ArkUI开发组件、Stage模型、多端部署、分布式应用开发、音频、视频、WebGL、OpenHarmony多媒体技术、Napi组件、OpenHarmony内核、Harmony南向开发、鸿蒙项目实战等等)鸿蒙(HarmonyOS NEXT)技术知识点。
希望这一份鸿蒙学习资料能够给大家带来帮助,有需要的小伙伴自行领取,限时开源,先到先得~无套路领取!!
如果你是一名有经验的资深Android移动开发、Java开发、前端开发、对鸿蒙感兴趣以及转行人员,可以直接领取这份资料
获取这份完整版高清学习路线,请点击→纯血版全套鸿蒙HarmonyOS学习资料
鸿蒙(HarmonyOS NEXT)最新学习路线
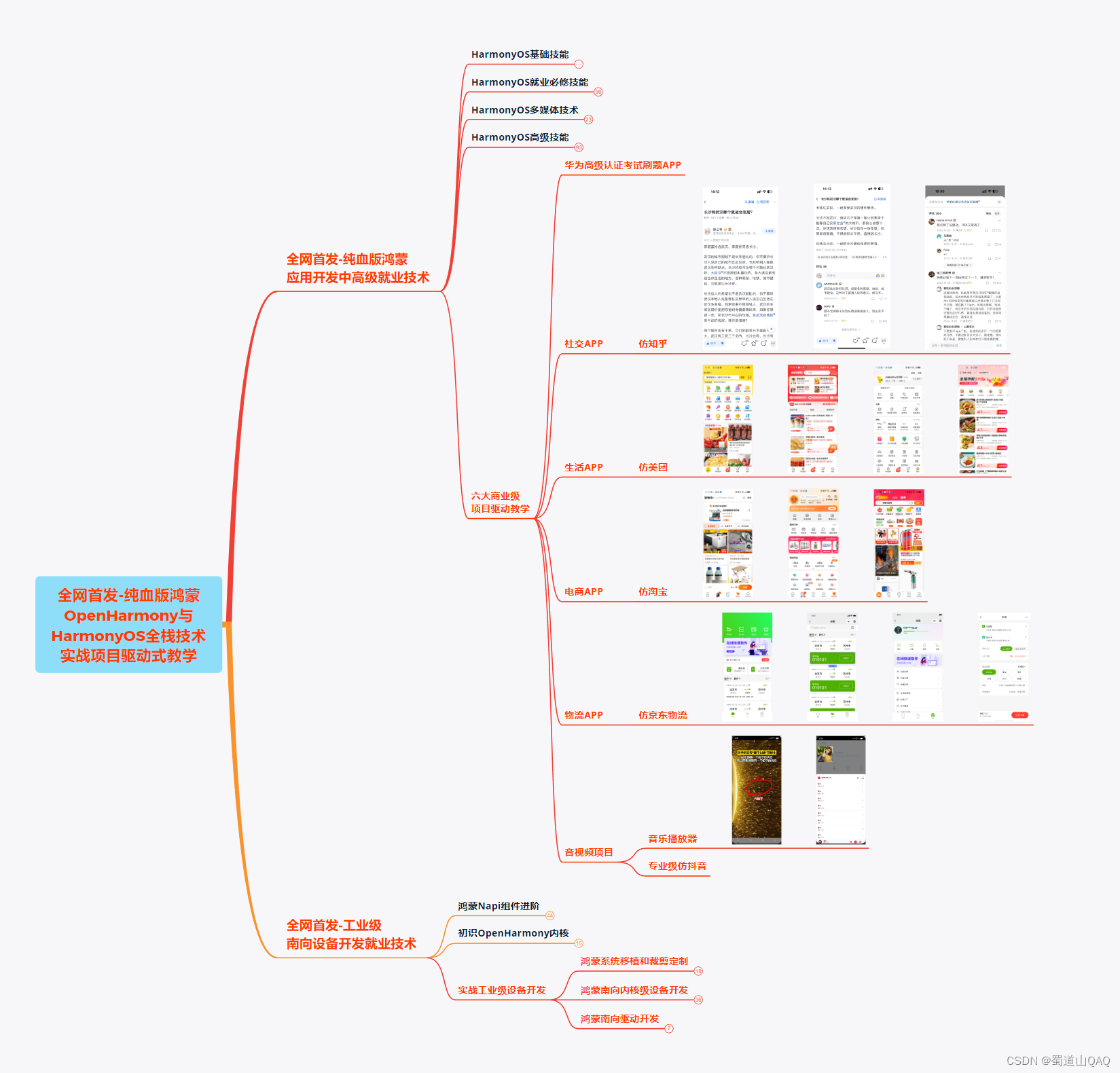
-
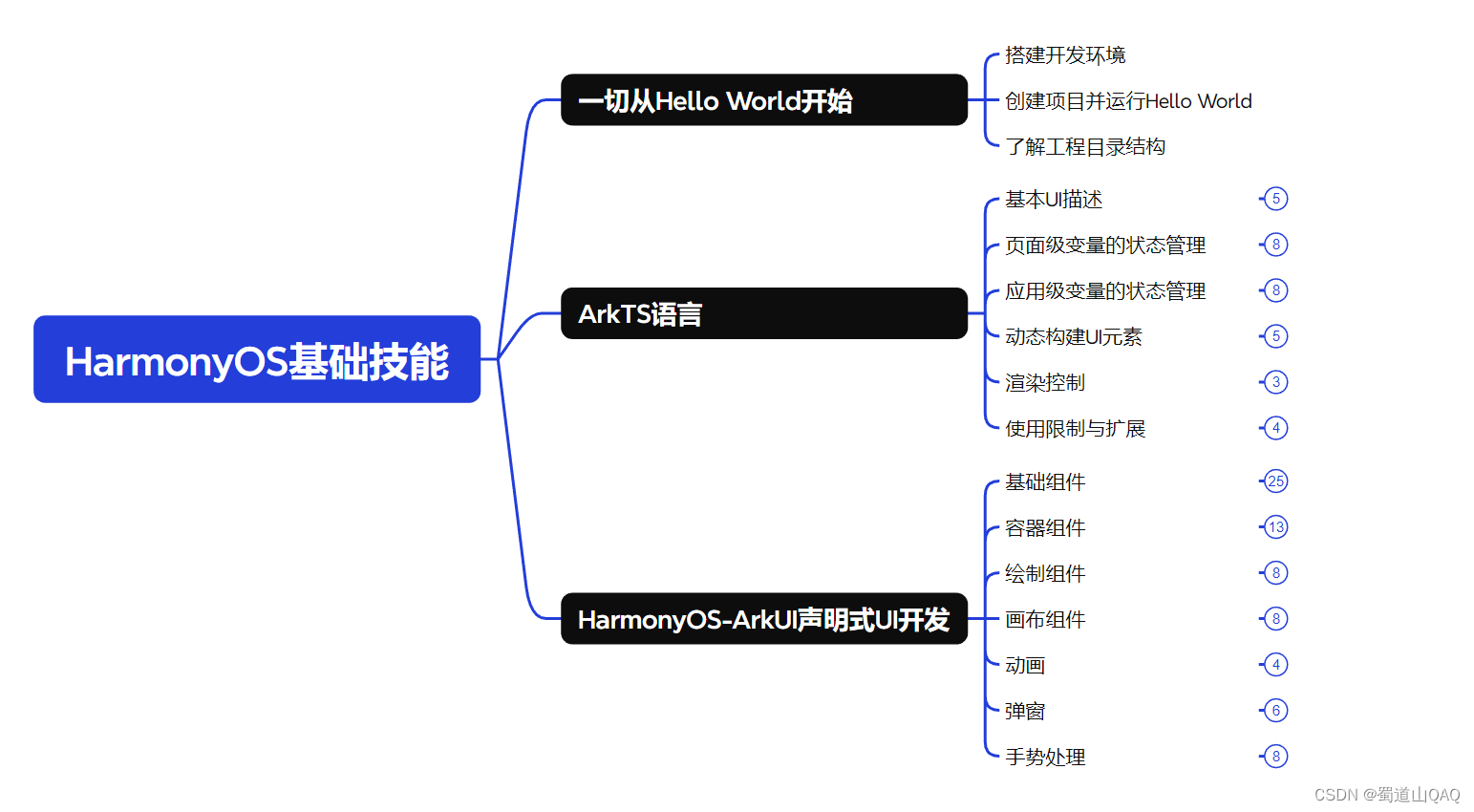
HarmonOS基础技能
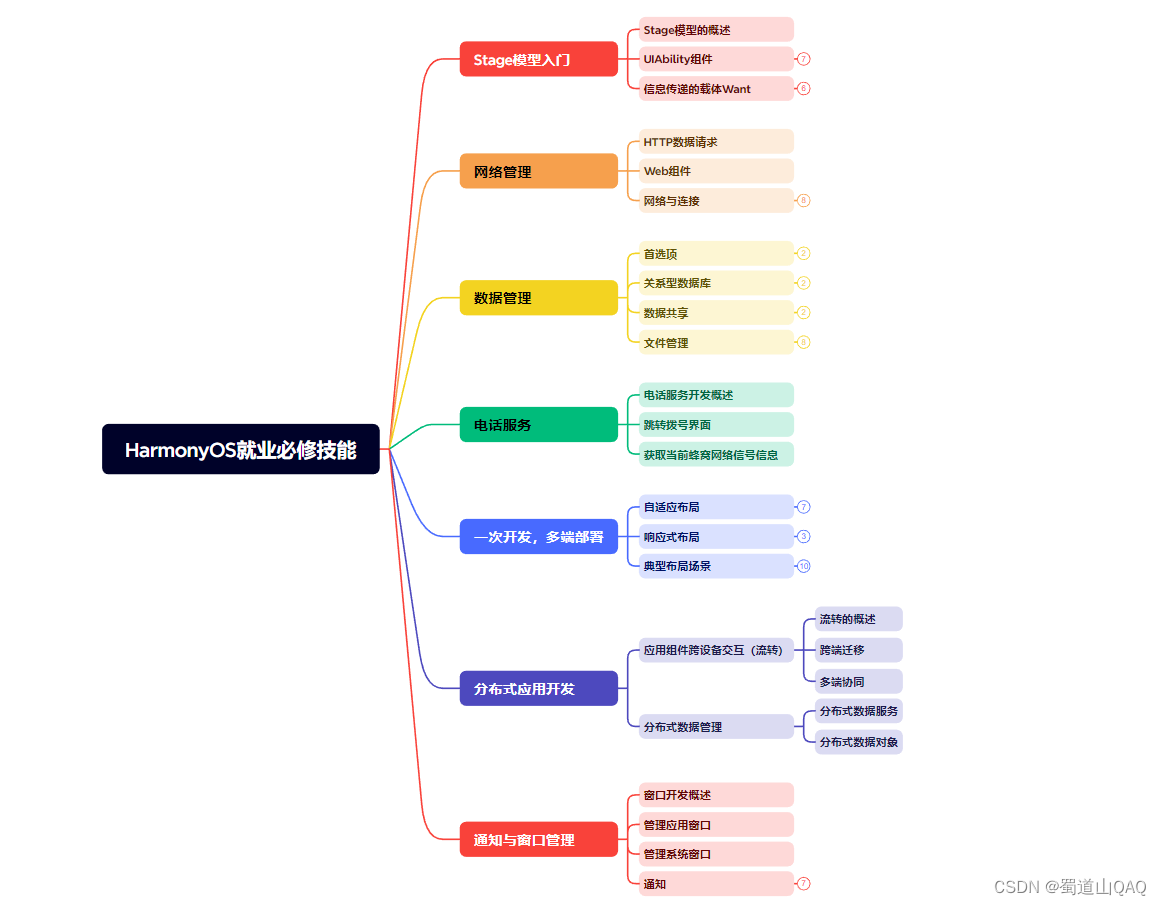
- HarmonOS就业必备技能
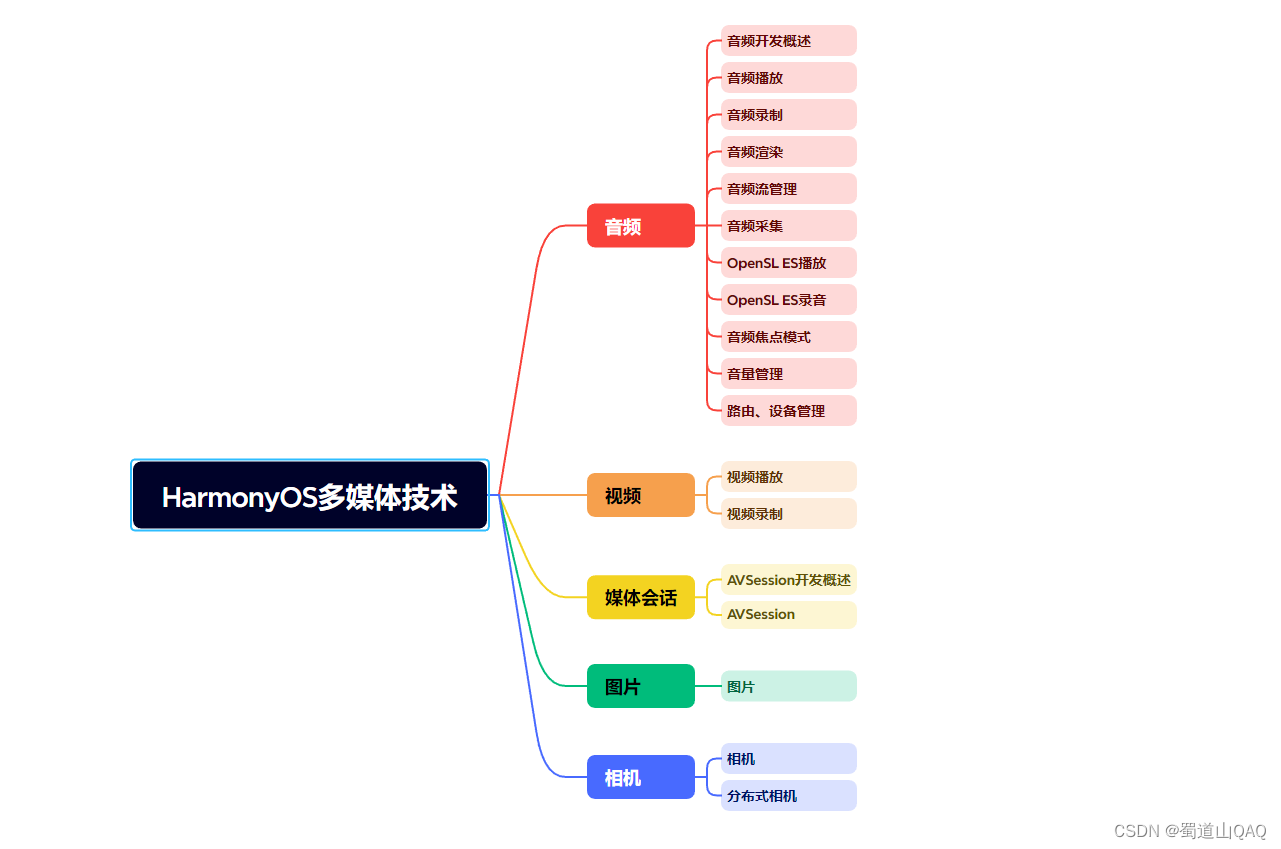
- HarmonOS多媒体技术
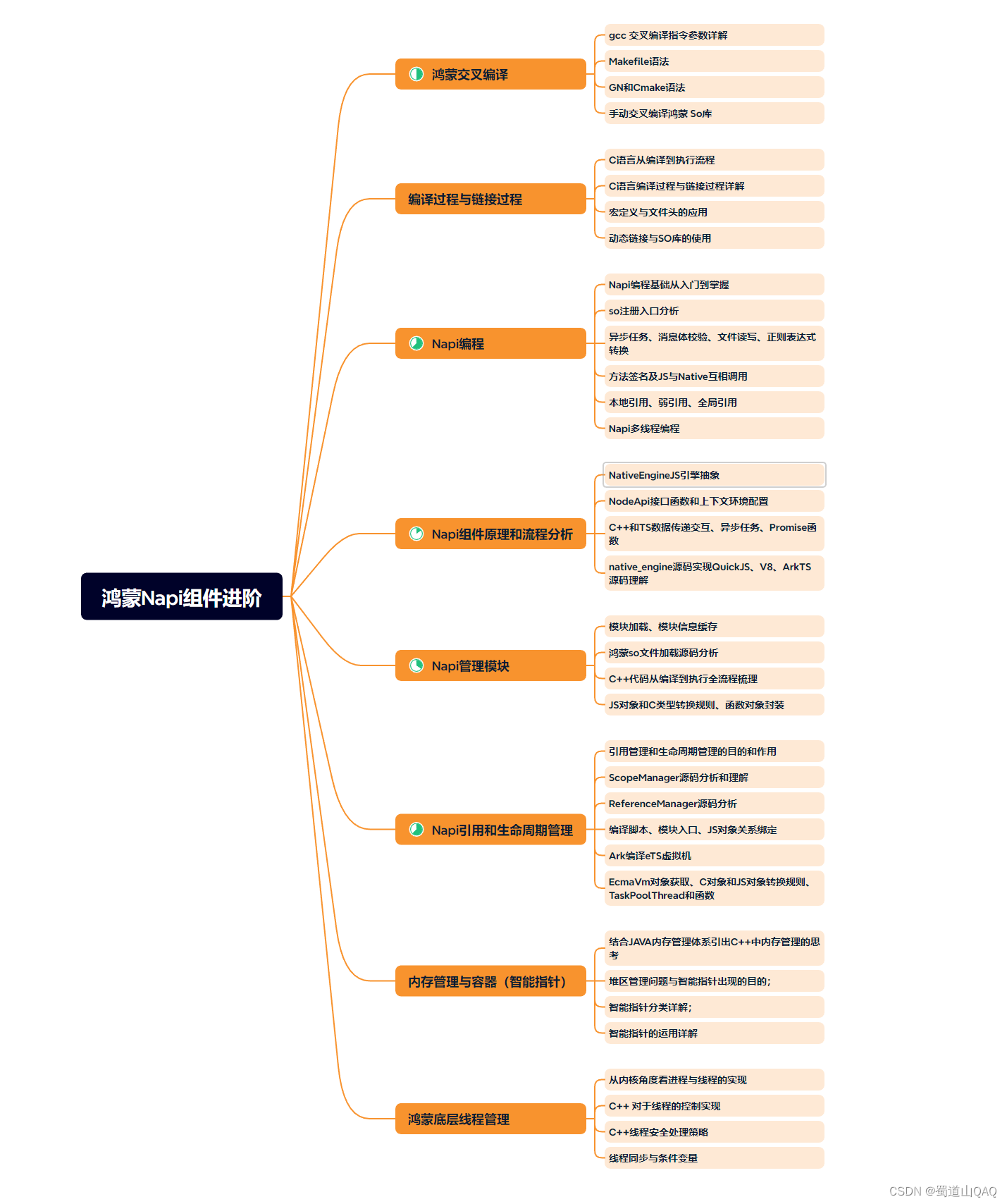
- 鸿蒙NaPi组件进阶
- HarmonOS高级技能

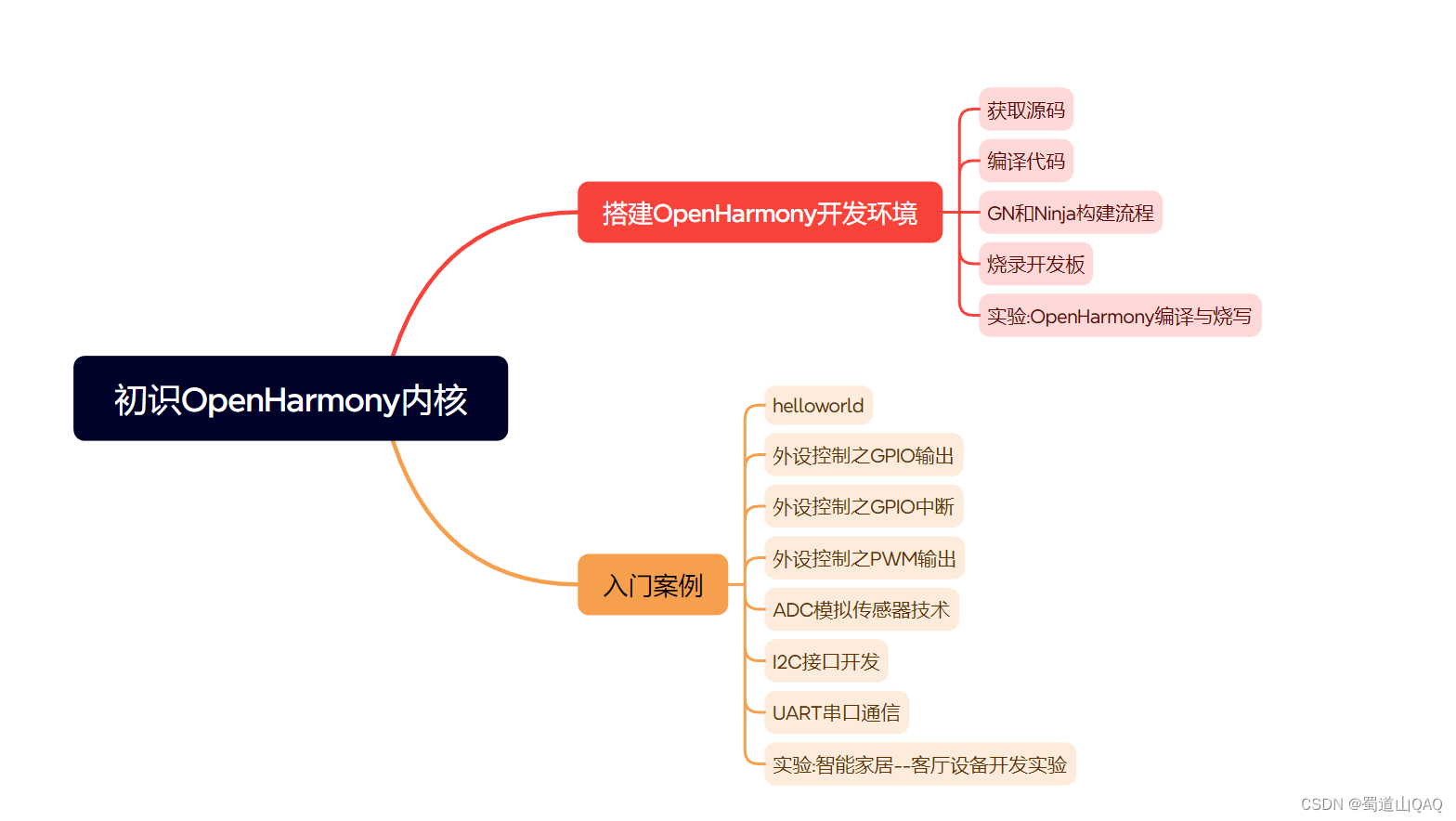
- 初识HarmonOS内核
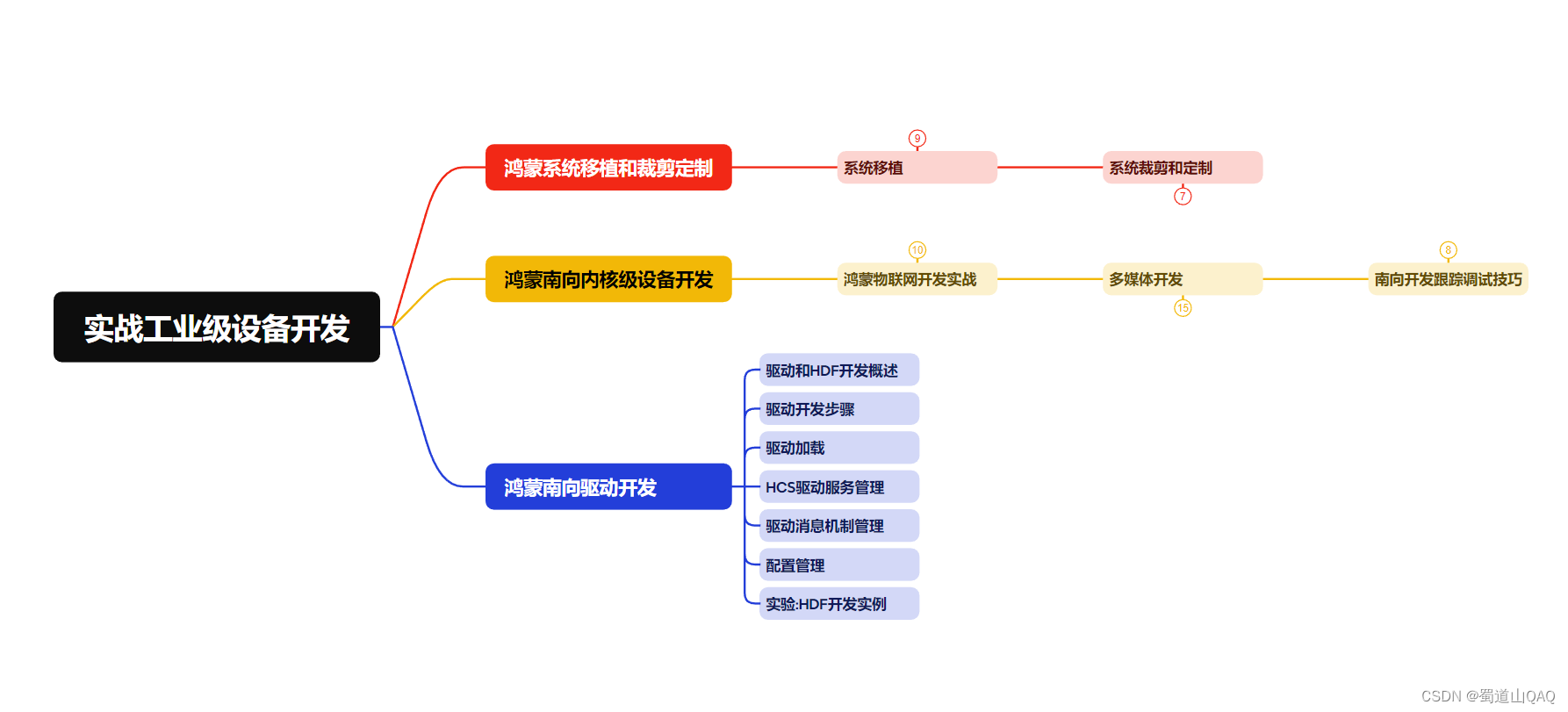
- 实战就业级设备开发
有了路线图,怎么能没有学习资料呢,小编也准备了一份联合鸿蒙官方发布笔记整理收纳的一套系统性的鸿蒙(OpenHarmony )学习手册(共计1236页)与鸿蒙(OpenHarmony )开发入门教学视频,内容包含:ArkTS、ArkUI、Web开发、应用模型、资源分类…等知识点。
获取以上完整版高清学习路线,请点击→纯血版全套鸿蒙HarmonyOS学习资料
《鸿蒙 (OpenHarmony)开发入门教学视频》
《鸿蒙生态应用开发V2.0白皮书》
《鸿蒙 (OpenHarmony)开发基础到实战手册》
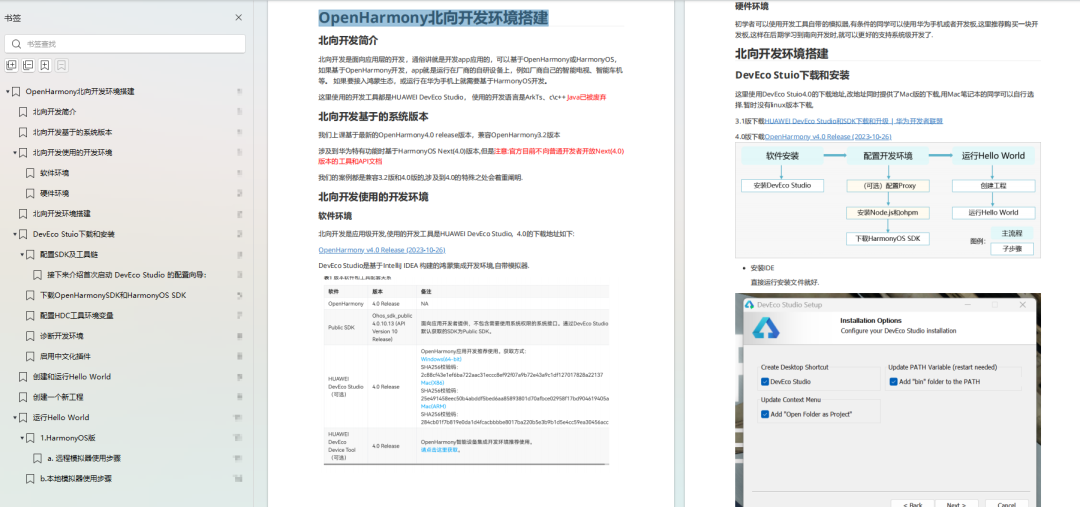
OpenHarmony北向、南向开发环境搭建
《鸿蒙开发基础》
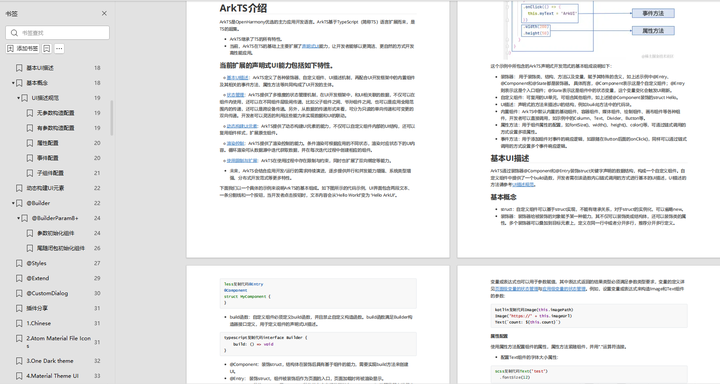
- ArkTS语言
- 安装DevEco Studio
- 运用你的第一个ArkTS应用
- ArkUI声明式UI开发
- .……
《鸿蒙开发进阶》
- Stage模型入门
- 网络管理
- 数据管理
- 电话服务
- 分布式应用开发
- 通知与窗口管理
- 多媒体技术
- 安全技能
- 任务管理
- WebGL
- 国际化开发
- 应用测试
- DFX面向未来设计
- 鸿蒙系统移植和裁剪定制
- ……
《鸿蒙进阶实战》
- ArkTS实践
- UIAbility应用
- 网络案例
- ……
获取以上完整鸿蒙HarmonyOS学习资料,请点击→纯血版全套鸿蒙HarmonyOS学习资料
总结
总的来说,华为鸿蒙不再兼容安卓,对中年程序员来说是一个挑战,也是一个机会。只有积极应对变化,不断学习和提升自己,他们才能在这个变革的时代中立于不败之地。
















 925
925

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









