







简介
在读此文件之前最好先看看 avformat_find_stream_info读数据时的几个缓存数据的流向
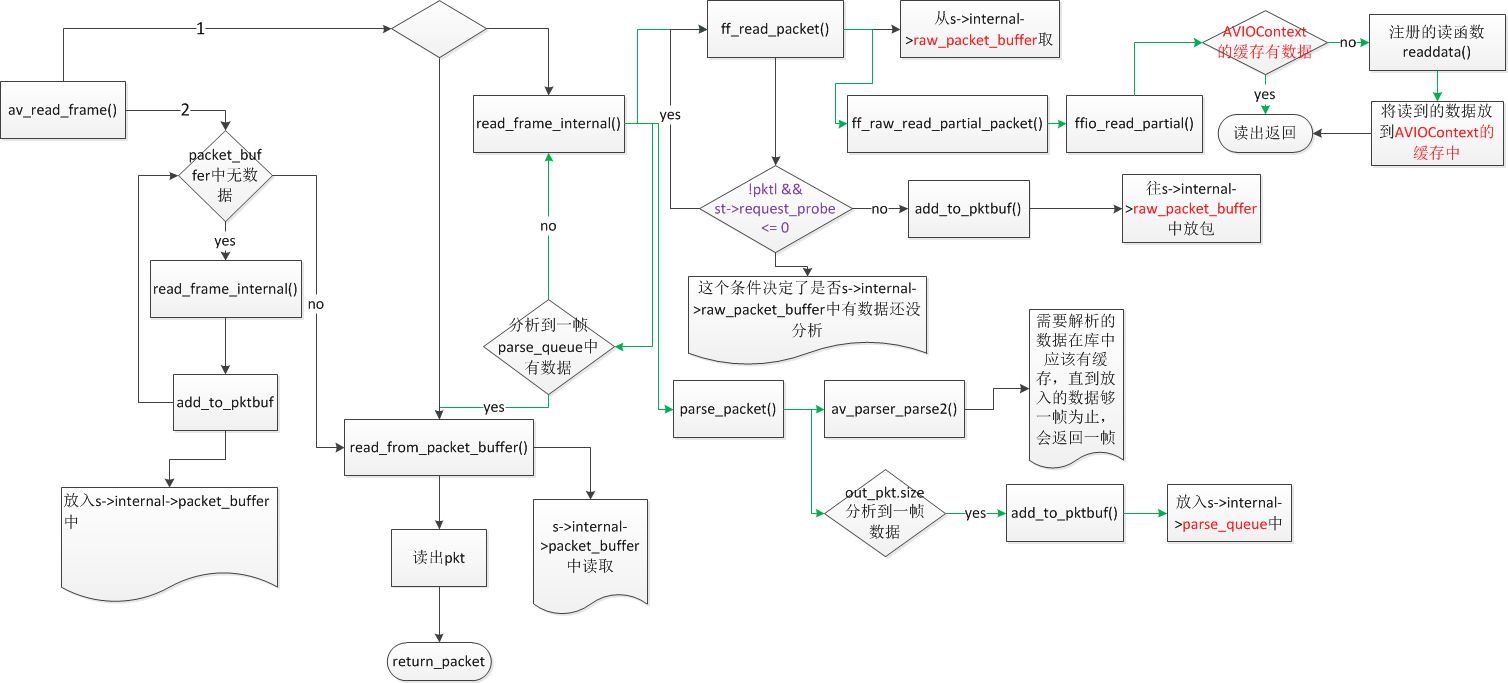
这篇文章讲解了s->internal->packet_buffer这个队列中数据的来源。同时对read_frame_internal函数有图例说明。
基本上看完这篇文件,对av_read_frame函数就一目了然了。
av_read_frame
流程图
代码解释
s->flags & AVFMT_FLAG_GENPTS;
if (!genpts) {}词句的判断还没有具体分析。
int av_read_frame(AVFormatContext *s, AVPacket *pkt)
{
const int genpts = s->flags & AVFMT_FLAG_GENPTS;
int eof = 0;
int ret;
AVStream *st;
if (!genpts) {
//开始进来的时候s->internal->packet_buffer的数据是avformat_find_stream_info中放进去的。
ret = s->internal->packet_buffer
? read_from_packet_buffer(&s->internal->packet_buffer,
&s->internal->packet_buffer_end, pkt)
: read_frame_internal(s, pkt);
if (ret < 0)
return ret;
goto return_packet;
}
for (;;) {
AVPacketList *pktl = s->internal->packet_buffer;
if (pktl) {
AVPacket *next_pkt = &pktl->pkt;
if (next_pkt->dts != AV_NOPTS_VALUE) {
int wrap_bits = s->streams[next_pkt->stream_index]->pts_wrap_bits;
// last dts seen for this stream. if any of packets following
// current one had no dts, we will set this to AV_NOPTS_VALUE.
int64_t last_dts = next_pkt->dts;
while (pktl && next_pkt->pts == AV_NOPTS_VALUE) {
if (pktl->pkt.stream_index == next_pkt->stream_index &&
(av_compare_mod(next_pkt->dts, pktl->pkt.dts, 2LL << (wrap_bits - 1)) < 0)) {
if (av_compare_mod(pktl->pkt.pts, pktl->pkt.dts, 2LL << (wrap_bits - 1))) {
// not B-frame
next_pkt->pts = pktl->pkt.dts;
}
if (last_dts != AV_NOPTS_VALUE) {
// Once last dts was set to AV_NOPTS_VALUE, we don't change it.
last_dts = pktl->pkt.dts;
}
}
pktl = pktl->next;
}
if (eof && next_pkt->pts == AV_NOPTS_VALUE && last_dts != AV_NOPTS_VALUE) {
// Fixing the last reference frame had none pts issue (For MXF etc).
// We only do this when
// 1. eof.
// 2. we are not able to resolve a pts value for current packet.
// 3. the packets for this stream at the end of the files had valid dts.
next_pkt->pts = last_dts + next_pkt->duration;
}
pktl = s->internal->packet_buffer;
}
/* read packet from packet buffer, if there is data */
st = s->streams[next_pkt->stream_index];
if (!(next_pkt->pts == AV_NOPTS_VALUE && st->discard < AVDISCARD_ALL &&
next_pkt->dts != AV_NOPTS_VALUE && !eof)) {
ret = read_from_packet_buffer(&s->internal->packet_buffer,
&s->internal->packet_buffer_end, pkt);
goto return_packet;
}
}
ret = read_frame_internal(s, pkt);
if (ret < 0) {
if (pktl && ret != AVERROR(EAGAIN)) {
eof = 1;
continue;
} else
return ret;
}
ret = add_to_pktbuf(&s->internal->packet_buffer, pkt,
&s->internal->packet_buffer_end, 1);
av_packet_unref(pkt);
if (ret < 0)
return ret;
}
return_packet:
st = s->streams[pkt->stream_index];
if ((s->iformat->flags & AVFMT_GENERIC_INDEX) && pkt->flags & AV_PKT_FLAG_KEY) {
ff_reduce_index(s, st->index);
av_add_index_entry(st, pkt->pos, pkt->dts, 0, 0, AVINDEX_KEYFRAME);
}
if (is_relative(pkt->dts))
pkt->dts -= RELATIVE_TS_BASE;
if (is_relative(pkt->pts))
pkt->pts -= RELATIVE_TS_BASE;
return ret;
}














 898
898

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









