






目录
前言
前面一直使用camshift做跟踪,但是camshift实际使用的效果并不怎么好。随着对OpenCV稍微了解了一点点之后,看到这篇博客[同时看到这篇博客自适应三特征融合之Camshift目标跟踪——颜色、纹理、边缘方向]。在评论中提到现在较好的跟踪算法有KCF、TLD、MIL等。于是乎,原来死活找不到的跟踪算法,突然井喷式的冒出来,以前完全不懂视觉相关的知识,结果找算法都找不到,但是经过了这个层次之后,慢慢就接触到更高级的东西。虽然还有很多不懂的东西,但是起码视觉跟踪方面也算是翻开了新篇章。
跟踪算法
简单的说,对象跟踪就是在视频的连续帧中定位对象。如果我们知道了物体在当前帧之前的运动模型(运动模型指对象在当前帧之前的帧的位置和速度),就可以根据当前的运动模型预测新位置,并且你将非常对象的新位置(卡尔曼滤波)。当然我们可以有更多对象运动的信息,比如对象在先前帧的外观。换句话说 ,我们可以构建一个外观模型来编码对象的外观。该外观模型可以用于在由运动模型预测的位置的小邻域中搜索,以更精确地预测对象的位置。
运动模型预测对象的大致位置,外观模型微调这个估计以基于外观提供更准确的估计。如果对象很简单,没有改变它的外观很多,我们可以使用一个简单的模板作为外观模型,并寻找那个模板。然而,现实生活中,对象的外观可能会发生巨大变化。为了解决这个问题,在许多现代跟踪器中,该外观模型是以在线方式训练的分类器。
分类器的工作是将图像的矩形区域分类为对象或背景。分类器接受图像补丁作为输入,并返回0和1之间的分数,以指示图像补丁包含对象的概率。当绝对确定图像补丁是背景时,分数为0;当绝对确定补丁是对象时,分数为1.
在机器学习中,我们使用在线这个词来指代在运行时在运行中训练的算法。离线分类器可能需要数千个实例来训练分类器,但是在运行时通常使用非常少的实例训练在线分类器。
分类器通过馈送正(对象)和负(背景)示例来训练。如果你想建立一个分类器来检测猫,你训练它与成千上万包含猫的图像和数千不包含猫的图像。这样分类器学习区分什么是猫和什么不是猫。在建立在线分类器,我们没有成千上万的正和负的例子。
博主:也就是我们可以给机器喂图片,让他建立一个模型,用这个模型去判别猫,但是我们可能无法知道机器判别这个物体是否是猫的标准。
- BOOSTING跟踪器:
此跟踪器基于AdaBoost的在线版本——基于HAAR级联的面部检测器在内部使用的算法。这个分类器需要在运行时用对象的正和负例子训练。由用户提供的初始边界框作为对象的正例,并且边界框外部的许多图像补片被当做背景。给定新帧,对先前位置的邻域中的每个像素运行分类器,并记录分类器的得分。 对象的新位置是得分最大的位置。 所以现在我们有一个更积极的例子为分类器。 随着更多的帧进入,分类器用该附加数据更新。
优点:无。 这个算法是十年前并且可以运用,但我找不到一个很好的理由使用它,特别是当其他高级跟踪器(MIL,KCF)基于类似的原理可用。
缺点:跟踪性能平庸。
MIL跟踪器
此跟踪器在概念上类似于上述的BOOSTING跟踪器。 最大的区别在于,代替仅考虑对象的当前位置作为积极示例,它在当前位置周围的小邻域中查找以生成若干潜在的正例子。 你可能认为这是一个坏主意,因为在大多数这些“积极”的例子中,对象不是中心。在MIL中,你没有指定正和负例子,但是有正和负“包”。 正包中的图像集合并不都是积极的例子。 相反,只有一个图像在积极的包里需要一个积极的例子。在我们的示例中,正包包含以对象的当前位置为中心的补丁,以及在其周围的小邻域中的补丁。 即使被跟踪对象的当前位置不准确,当来自当前位置的邻域的样本被放入正包中时,很有可能这个包包含至少一个图像,其中对象被良好地置于居中。
优点:性能相当不错。 它不像BOOSTING跟踪器那样漂移,它在部分遮挡下合理地工作。如果你使用OpenCV 3.0,这可能是你可用的最好的跟踪。 但是如果你使用更高版本,考虑KCF。
缺点:跟踪失败报告不可靠。不能从完全闭塞恢复。
- KCF跟踪器
KFC代表内核化相关滤波器。 这个跟踪器建立在前两个跟踪器提出的想法。 该跟踪器利用了这样的事实,即在MIL跟踪器中使用的多个正样本具有大的重叠区域。 这种重叠的数据导致一些良好的数学特性,利用这个跟踪器,使跟踪更快,同时更准确。
优点:准确度和速度都比MIL更好,它报告跟踪失败比BOOSTING和MIL更好。* 如果您使用OpenCV 3.1和更高版本,我建议对于大多数应用程序使用这个。*
博主:看到这句话,估计要开始研究KCF算法了。哈哈!
缺点:不能从完全闭塞恢复。 未在OpenCV 3.0中实现。
Bug警告:在OpenCV 3.1(仅限Python)中有一个错误,因为返回了不正确的边界框。 参见错误报告。
- TLD跟踪器
TLD代表跟踪,学习和检测。 顾名思义,该跟踪器将长期跟踪任务分解为三个组件 - (短期)跟踪,学习和检测。 从作者的论文,“跟踪器跟踪对象从一帧到帧。 检测器定位到目前为止观察到的所有外观,并在必要时校正跟踪器。 学习估计检测器的错误并更新它以避免未来的这些错误。“这个跟踪器的输出往往会跳一下。 例如,如果你正在跟踪行人,并且场景中还有其他行人,则该跟踪器有时可以临时跟踪与您要跟踪的行人不同的行人。 在积极的一面,这条轨道似乎在更大的规模,运动和遮挡下跟踪物体。 如果你有一个视频序列,其中的对象隐藏在另一个对象后面,这个跟踪器可能是一个不错的选择。
优点:在多个帧的遮挡下工作最好。 此外,跟踪最佳的规模变化。
缺点:很多误报,使它几乎不可用。
- MEDIANFLOW跟踪器
在内部,该跟踪器在时间上向前和向后方向上跟踪对象,并且测量这两个轨迹之间的差异。 最小化该ForwardBackward错误使它们能够可靠地检测跟踪失败并在视频序列中选择可靠的轨迹。
在我的测试中,我发现这个跟踪器在运动是可预测和小规模的时候效果最好。 与其他跟踪器不同,即使跟踪明显失败,该跟踪器知道跟踪失败的时间。
优点:优秀的跟踪失败报告。 当运动是可预测的并且没有遮挡时工作得很好。
缺点:在大规模运动下失败。
- GOTURN跟踪器
在跟踪器类中的所有跟踪算法中,这是基于卷积神经网络(CNN)的唯一一种。 它也是唯一一个使用离线训练模型,因为它比其他跟踪器更快。 从OpenCV文档,我们知道它“对视点变化,照明变化和变形是强大的”。 但它不能很好地处理遮挡。
Bug警告:不幸的是,在写这篇文章的时候,在使用Goturn时有一个错误在OpenCV 3.2实现使程序崩溃。
OpenCV3.0提供的跟踪API
OpenCV 3.0提供4种跟踪器的实现:BOOSTING,MIL,TLD,MEDIANFLOW。
OpenCV 3.1提供5种跟踪器的实现:BOOSTING,MIL,KCF,TLD,MEDIANFLOW
OpenCV 3.2提供6种跟踪器的实现:BOOSTING,MIL,KCF,TLD,MEDIANFLOW,GOTURN
- 算法使用代码
首先,选择跟踪器类型来设置跟踪器。
然后,打开一个视频,抓住一个框架。定义一个包含第一帧对象的边界框,并用第一个框架和边界框初始化跟踪器。
最后,从视频中读取视频帧,并且在循环中更新跟踪器以获得当前帧的新边界框,然后显示结果。
#include <opencv2/opencv.hpp>
#include <opencv2/tracking.hpp>
using namespace cv;
using namespace std;
int main(int argc, char** argv)
{
Ptr<Tracker> tracker = Tracker::create("MIL");
VideoCapture video("videos/chaplin.mp4");
if(!video.isOpened())
{
cout << "could not read video file" << endl;
return 1;
}
Mat frame;
video.read(frame);
Rect2d bbox(287, 23, 86, 320);
tracker->init(frame, bbox);
while(video.read(frame))
{
tracker->update(frame, bbox);
rectangle(frame, bbox, Scalar(255, 0, 0), 2, 1);
imshow("Tracking", frame);
int k = waitKey(1);
if(k==27) break;
}
}opencv3.2+vs2013+opencv_contrib3.2
对于vs2013配置opencv3.2的过程,其实网上有很多文章讲解。但是我在编译和配置的过程中,遇到了许多问题。不只是在一片博客中找到答案,而是在多篇博客中找到答案,所以博主还是决定总结一下!这样以后再次遇到这些问题,就不会重复性的劳动了!
opencv3.2和opencv_contrib3.2源码下载
注意:网上有许多关于VS2015下配置opencv3.2的方法,使用的是opencv-3.2.0-vc14.exe,也就是直接是windows版本的安装文件,但是必须是在VS2015以上编译版本才可以使用这种方法,在VS2013的编译环境中使用,我们需要下载opencv3.2的源码,在cmake的帮助下自行编译。博主使用的是VS2013,开始用的opencv3.3.1的版本,编译一直失败,后来查询了一下,可能是版本太高的问题。所以把版本降到opencv3.2。之后,就发现了一大堆的好的教程,我按照别人的教程,编译了一下午,终于配置成功。特此记录一下。
这里提供一下官网的opencv3.2.0的下载地址。
同时,因为要学习使用kcf算法,必须要添加opencv_contrib库。这里注意:opencv_contrib的版本要和下载的opencv的版本匹配。博主最开始使用的是最新版本的opencv_contrib版本,结果在cmake的时候出现了错误,后来才改正过来,感觉把opencv3.2在VS2013下编译的一些坑都踩了。
这里提供一下官网的opencv_contrib3.2.0的下载地址
最后,需要使用cmake来对opencv3.2.0的源码进行编译,所以我们需要下载一个windows版本的cmake。博主使用的cmake版本是cmake-3.6.0-win64-x64.zip。
这里提供一下官网的cmake版本下载地址
cmake编译opencv3.2.0
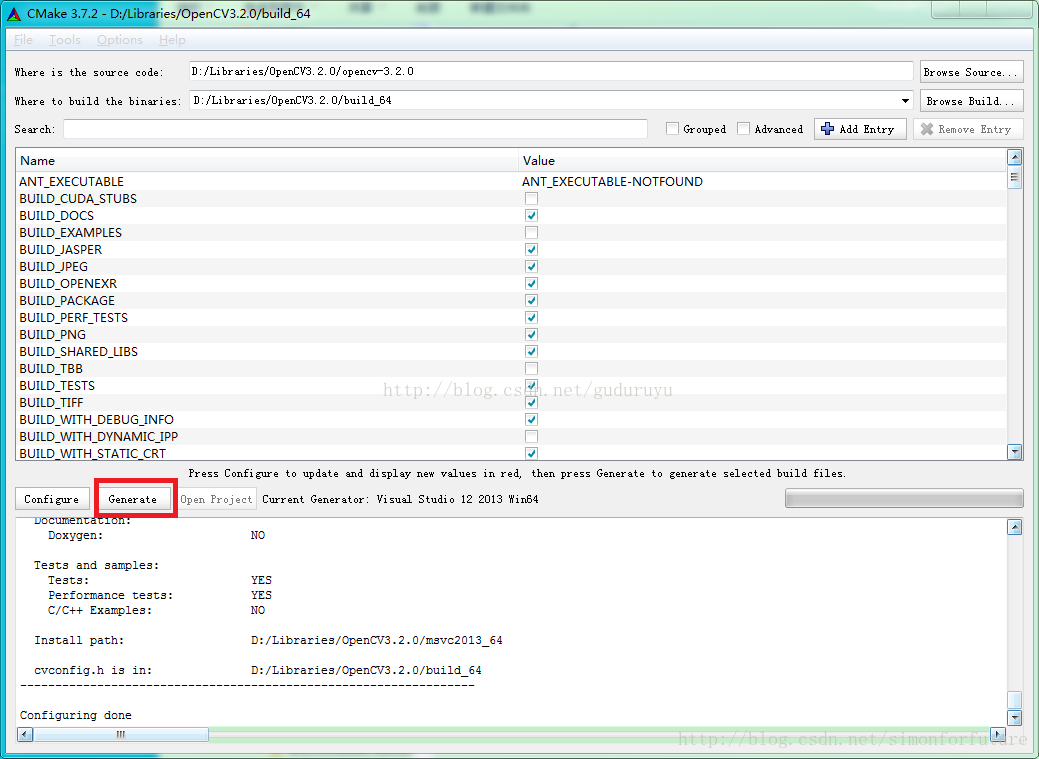
博主下载的cmake版本是免安装版本,解压之后,在cmake-3.6.0-win64-x64\bin下直接双击cmake-gui.exe即可打开cmake。然后进行cmake,注意就是指定opencv3.2.0的源码目录和build目录,然后点击configure,指定如下:
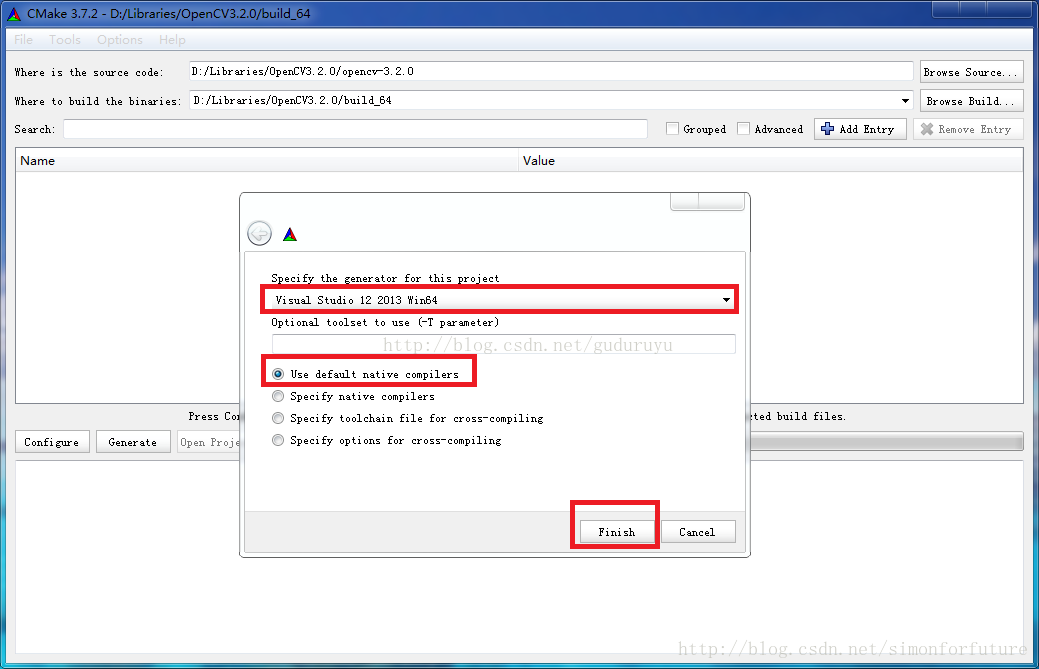
因为博主的windows是64位的,所以选择的VS版本是Visual Studio 12 2013 Win64,而且因为是编译windows平台的opencv库,所以不需要指定编译器,这也是桌面版的优势,以后要在ubuntu下交叉编译opencv3.2.0版本,估计又是一堆坑。
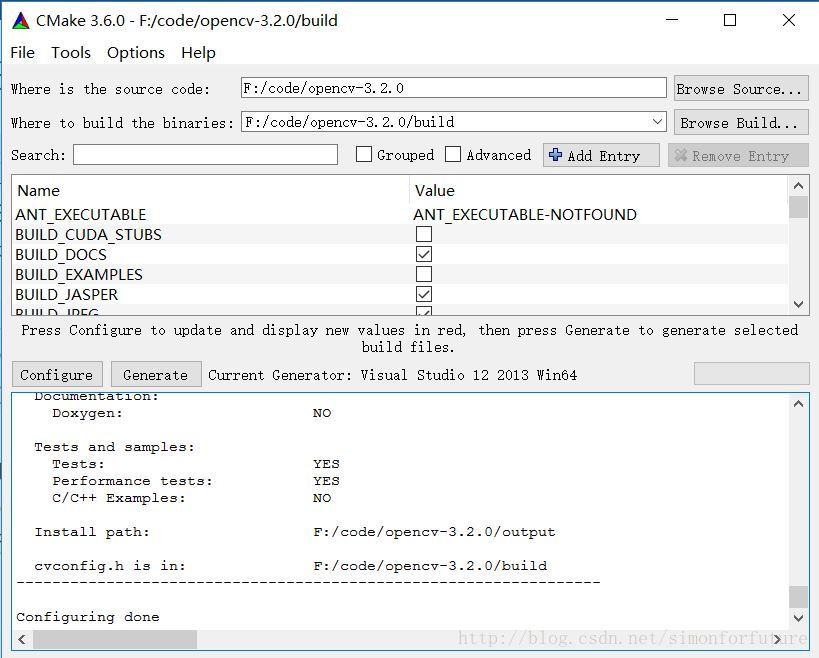
配置成功,如下图所示:
但是配置过程并不是那么顺利的,cmake需要下载各种包来进行安装,尤其是这个ippicv_windows_20151201.zip,因为这个压缩包移植有错误,所以配置过程一直失败,好在这是个大家都会遇到的问题,大家参考这个网址下载ippicv_windows_20151201.zip即可。然后把opencv-3.2.0\3rdparty\ippicv\downloads\windows-04e81ce5d0e329c3fbc606ae32cad44d\ippicv_windows_20151201.zip替换掉,然后继续configure即可通过。
按照上面的方法,直接配置即可通过,但是博主要添加额外的模块opencv_contrib3.2.0,在OPENCV_EXTRA_MODUALS_PATH选项中添加对应的opencv_contrib3.2.0的modules目录。如下图:
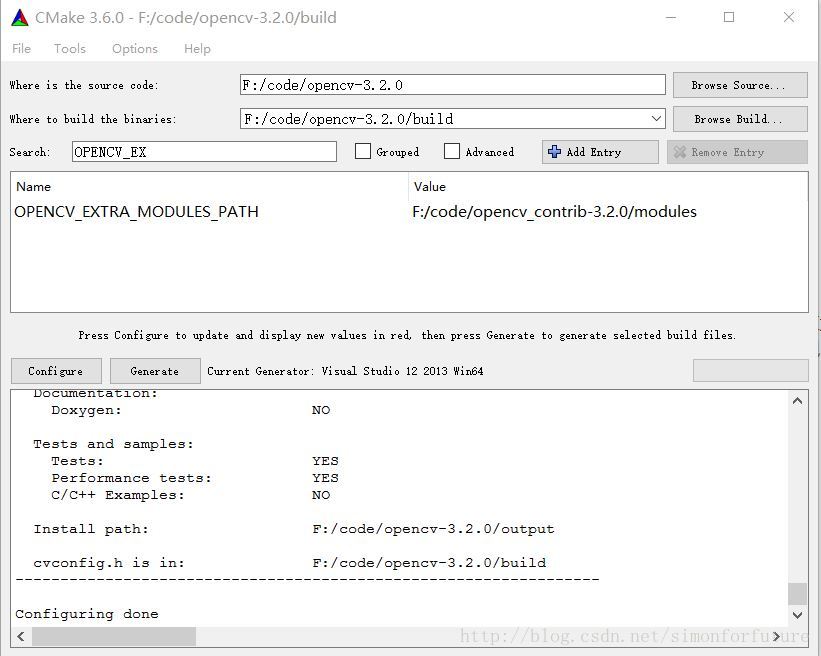
然后,通过CMAKE_INSTALL_PREFIX设置编译的库的输出目录,比如博主的目录为F:\code\opencv-3.2.0\output
最后,点击add Entry,添加CMAKE_DEBUG_POSTFIX选项,设置为d,用于区分debug和release版本,否则编译安装时debug版本会被release版本覆盖。
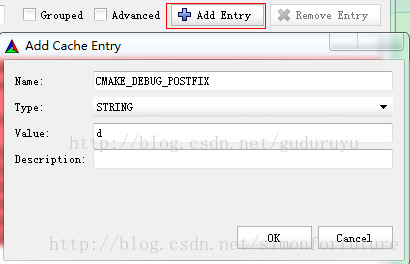
设置好后,再次点击configure,然后generate。然后就是很长时间的一段编译才成功。
但是,之后,运行程序的时候,会找不到dll文件,比如找不到opencv_core320.dll等,原因可能是没有在配置选项中勾选BUILD_opencv_world
如果没有勾选BUILD_opencv_world,将只会生成opencv_world320.dll。如果没有勾选BUILD_opencv_world,会生成
opencv_core320.dll
opencv_flann320.dll
opencv_highgui320.dll
opencv_imgcodecs320.dll
…等一系列的dll及相对应的lib,所以注意不要勾选BUILD_opencv_world。
在编译成功库之后,在F:\code\opencv-3.2.0\build目录(博主编译库放置的目录)下打开opencv.sln。具体过程参考opencv3.2+opencv_contrib+cmake。
注意:这opencv3.2+opencv_contrib+cmake。这篇博文中提到了我们要设置环境变量的路径。博主因为之前安装的opencv2.4.9版本,设置过环境变量,结果运行opencv3.0的程序出现找不到opencv_flann320.dll的错误,后来把原来的环境变量删除,然后重新添加了环境变量才成功。
当然,更详细参考【OpenCV3】OpenCV3.2.0在VS2013环境下Cmake编译与快速配置
在运行时出现Win64机器上VS报错“fatal error LNK1112: 模块计算机类型“x64”与目标计算机类型“X86”冲突”的问题,解决方法如下:
Win64机器上VS报错“fatal error LNK1112: 模块计算机类型“x64”与目标计算机类型“X86”冲突”
总结
VS2013下配置opecv3.2.0的过程不算复杂,但是也有许多的坑,对于【OpenCV3】OpenCV3.2.0在VS2013环境下Cmake编译与快速配置中.props类型的文件的配置过程参考VS2013怎么配置opencv才能不用每次都重新配置一遍?。
注意:vs2013中的属性管理器在 菜单栏的视图->其他窗口->属性管理器中
参考链接
近两年跟踪速度较快的算法小结(转)
对象跟踪小白?本文带你玩转OpenCV(C ++ / Python)
OpenCV编译
【OpenCV3】OpenCV3.2.0在VS2013环境下Cmake编译与快速配置
VS2013怎么配置opencv才能不用每次都重新配置一遍?
追踪算法KCF体验
为什么我的VS2013里找不到属性管理器
下载地址
opencv3.2.0下载地址
opencv_contrib3.2.0下载地址
cmake版本下载地址
ippicv_windows_20151201.zip下载地址














 913
913











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









