







什么!你也喜欢种菜?我说的不是这些:

游戏里谁还没有几百亩地了?卷起衣袖就是干,干不完,根本干不完。
然而现实生活中, 当我们大多数人面对一株小小植物时:

众所周知……
穷养不行就不养……
不是……
就富养!
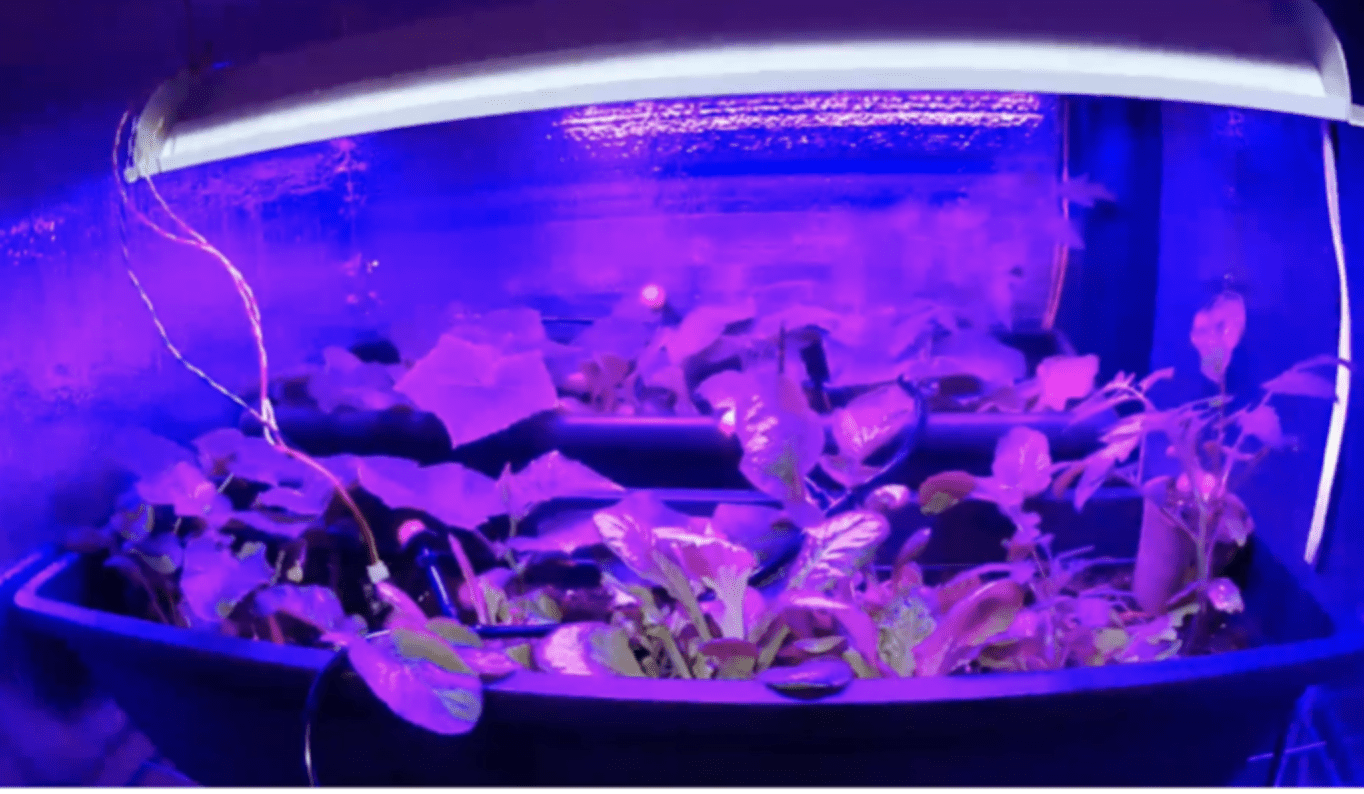
那就给他们造个温室吧。
硬件&工具
- Arduino Nano R3 x1
- Arduino 4路继电器扩展板 x1
- 超声波传感器 - HC-SR04(通用)x1
- PIR 运动传感器(通用)x1
- LED (通用)x1
- Adafruit 标准 LCD - 16x2 蓝底白字 (12C 接口焊接在上面) x1
- DFRobot Gravity : 模拟电容式土壤湿度传感器-耐腐蚀 x2
- RobotGeek 直流液体泵-大型 x2
- 液体阀x1
- 水箱 x1
- DHT22 温度传感器 x1
- 烙铁(通用)
主要结构:箱柜(按需添加间隔层)
下图是一个宜家的便携式衣柜,内外包裹着泡沫塑料隔热层。共设三层,最低一层主要用于种子开始:有一个加热垫,另外两层是针对植物的。



空气循环、加热以及温湿度测量都是通过一个ABS管道”加热器”来完成的。其中,使用DHT22传感器来测量温度和湿度。
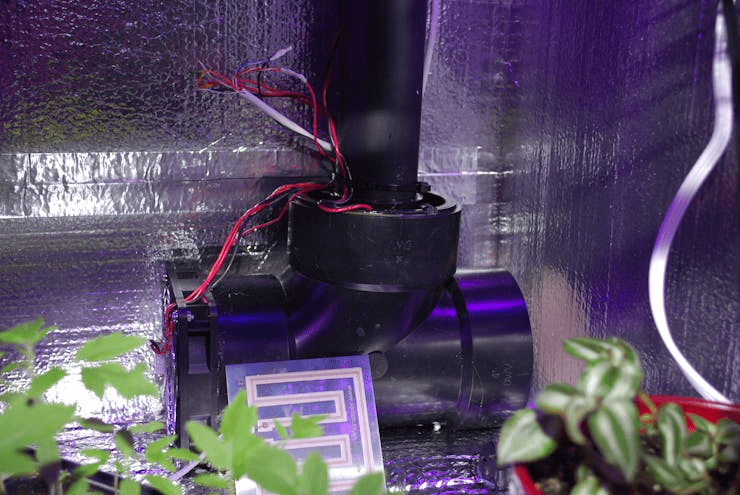
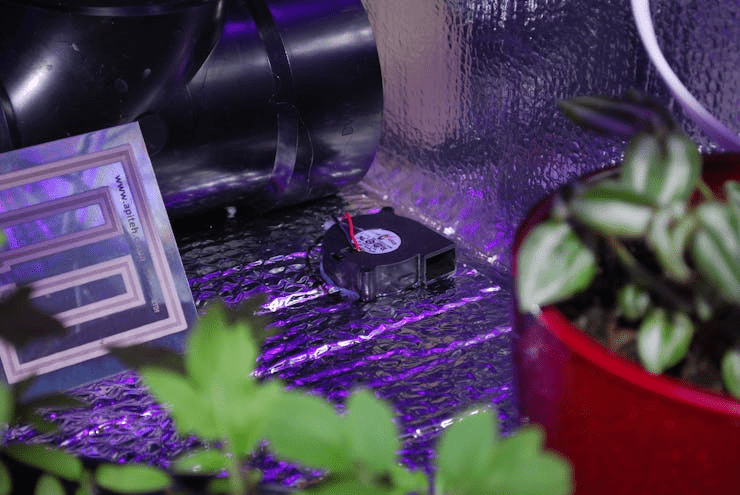
湿度控制由一个小型 12V “鼠笼式”风扇完成。

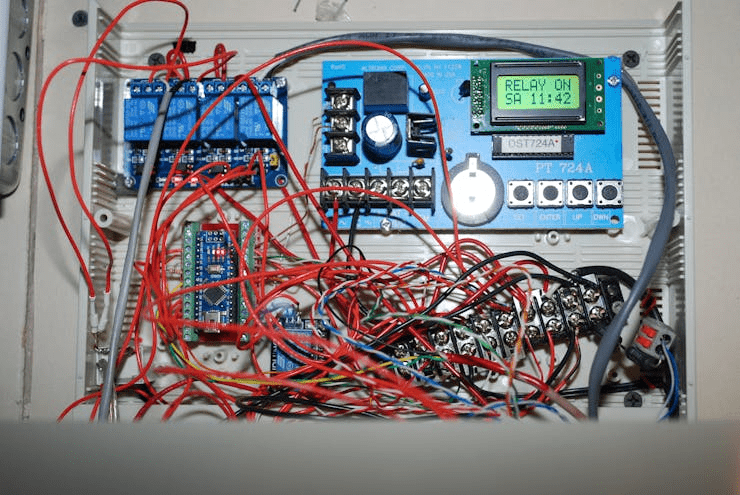
一块Arduino Nano(兼容板)作为控制单元的核心。系统配备了一个I2C接口的LCD屏,用于显示所有必要的参数和状态。当有人进入区域时,红外运动传感器会触发LCD屏的背光。

系统中有一个RTC继电器时钟,它通过一个数字引脚为整个系统提供”昼夜”参考信号。内部温度设有”夜间”和”白天”两个设定点,以模拟真实环境条件。在”白天”时段,灯光会持续保持开启状态约15小时。
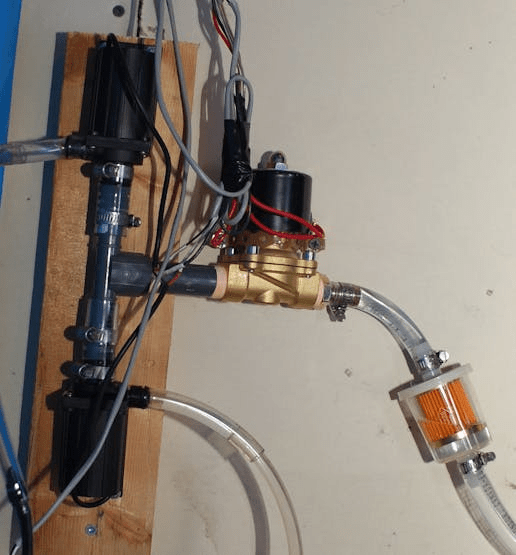
灌溉系统
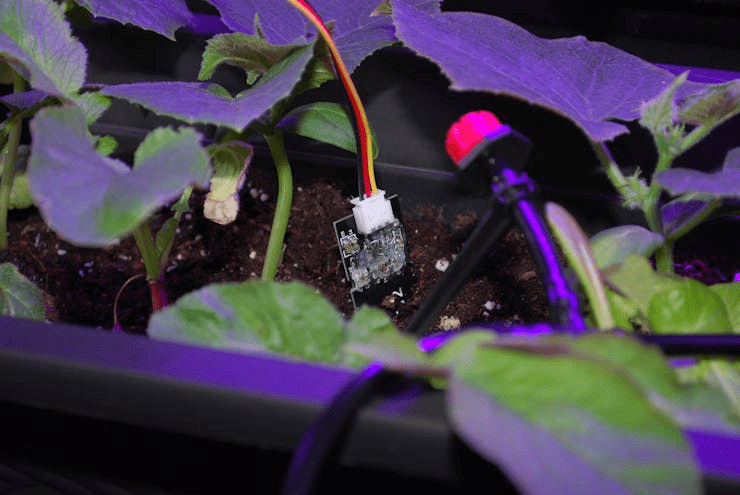
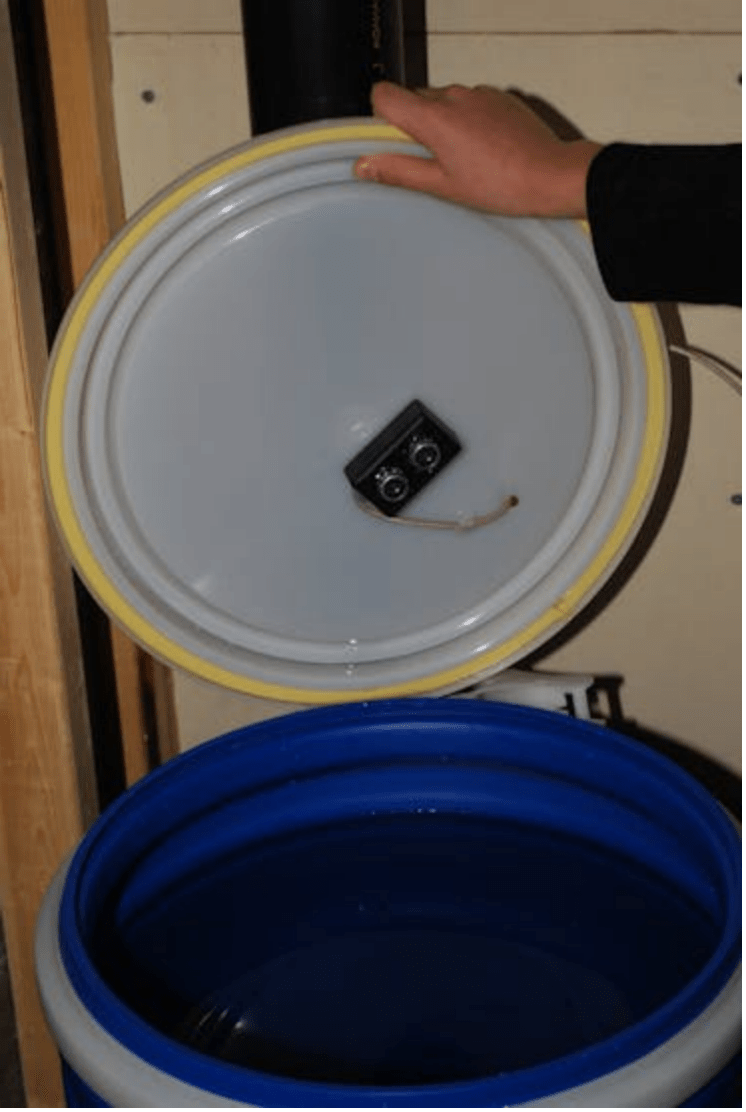
一个雨水(雪水)桶通过电磁阀和过滤器连接到双泵组。水位由超声波传感器测量。两个电容式土壤湿度传感器分别监测各自区域的湿度,并独立触发水泵工作。当桶中水位降至临界点时,灌溉会自动停止,同时一个LED灯会显示”水位低”警告。
代码
//===GreenHouse sketch created by Victor Onofrei. 2019===
#include <DHT.h>
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
#include <HCSR04.h>
#include <SandTimer.h>
#define DHTPIN 2
#define DHTTYPE DHT22
DHT dht(DHTPIN, DHTTYPE);
LiquidCrystal_I2C lcd(0x27,20,4);
HCSR04 watersens(5,6);
SandTimer timersensor;
SandTimer backlightimer;
SandTimer pump1timer;
SandTimer pump2timer;
const int lowaterled=4;
const int venthum=7;
const int irsensor=8;
const int pump2=9;
const int heaterpin=10;
const int lightpin=11;
const int pump1=12;
const int timerpin=13;
int h=0;
int t=0;
int Soil1=0; //lower soil moisture sensor
int Soil2=0;
int settemp;
int daytemp=26;
int nightemp=23;
int timervalue;
int motiondetect;
int waterlevel;
void setup() {
dht.begin();
lcd.init();
timersensor.start(2000);
backlightimer.start(30000);
pump1timer.start(10000);
pump2timer.start(10000);
pinMode(heaterpin, OUTPUT);
pinMode(timerpin, INPUT);
pinMode(lightpin, OUTPUT);
pinMode(lowaterled, OUTPUT);
pinMode(venthum, OUTPUT);
pinMode(irsensor, INPUT);
pinMode(pump1, OUTPUT);
pinMode(pump2, OUTPUT);
digitalWrite(pump1, HIGH);
digitalWrite(pump2, HIGH);
}
void loop() {
sensorcheck();
lowater();
settempset();
humidcontrol();
runheat();
runlights();
lcdprint();
lcdbacklight();
watering();
}
//===========Functions=============
void sensorcheck(){
if (timersensor.finished()){
h=dht.readHumidity();
t=dht.readTemperature();
timervalue=digitalRead(timerpin);
Soil1=analogRead(6);
Soil2=analogRead(7);
Soil1=map(Soil1,560,270,01,99);
Soil2=map(Soil2,545,270,01,99);
motiondetect=digitalRead(irsensor);
waterlevel=watersens.dist();
waterlevel=map(waterlevel,3,57,99,01);
timersensor.startOver();
}
}
void lowater(){
if (waterlevel<=3){
digitalWrite(lowaterled, HIGH);
}
else{
digitalWrite(lowaterled, LOW);
}
}
void watering(){
if ((waterlevel>=3)&&(Soil1<=24)){
digitalWrite(pump1, LOW);
// if (pump1timer.finished()){
// digitalWrite(pump1, HIGH);
// pump1timer.startOver();
// }
}
else{
digitalWrite(pump1, HIGH);
}
if ((waterlevel>=3)&&(Soil2<=24)){
digitalWrite(pump2, LOW);
// if (pump2timer.finished()){
// digitalWrite(pump2, HIGH);
// pump2timer.startOver();
// }
}
else {
digitalWrite(pump2, HIGH);
}
}
void settempset(){
if (timervalue==HIGH){
settemp=daytemp;
}
else{
settemp=nightemp;
}
}
void lcdbacklight(){
if (motiondetect==1){
lcd.backlight();
}
else if ((motiondetect==0)&&(backlightimer.finished())){
lcd.noBacklight();
backlightimer.startOver();
}
}
void humidcontrol(){
if(h>=72){
digitalWrite(venthum, HIGH);
}
else if (h<=65){
digitalWrite(venthum, LOW);
}
}
void runheat(){
if(t>=settemp){
digitalWrite(heaterpin, HIGH);
}
else{
digitalWrite(heaterpin, LOW);
}
}
void runlights(){
if (timervalue==LOW){
digitalWrite(lightpin, HIGH);
}
else{
digitalWrite(lightpin, LOW);
}
}
void lcdprint(){
lcd.setCursor(0,0);
lcd.print("T/H:");
lcd.print(t);
lcd.print("/");
lcd.print(h);
lcd.setCursor(10,0);
lcd.print("WL:");
lcd.print(waterlevel);
lcd.print("%");
lcd.setCursor(0,1);
lcd.print("Z1:");
lcd.print(Soil1);
lcd.print("%");
lcd.print(" ");
lcd.print("Z2:");
lcd.print(Soil2);
lcd.print("%");
}
快去救救你的植物吧。

文章首发于DF创客社区


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









