







社区公众号记录每周值得分享的创客相关内容,每周五发布~
周刊首发于DF创客社区,欢迎投稿或推荐相关内容。
投稿邮箱:MakerCommunity@outlook.com
挥拍如风的高精度乒乓球机器人
MIT工程师们开发了一款令人印象深刻的乒乓球机器人,它不仅能以极高的精度和速度回球,更展示了机器人技术在快速反应领域的突破性进展。
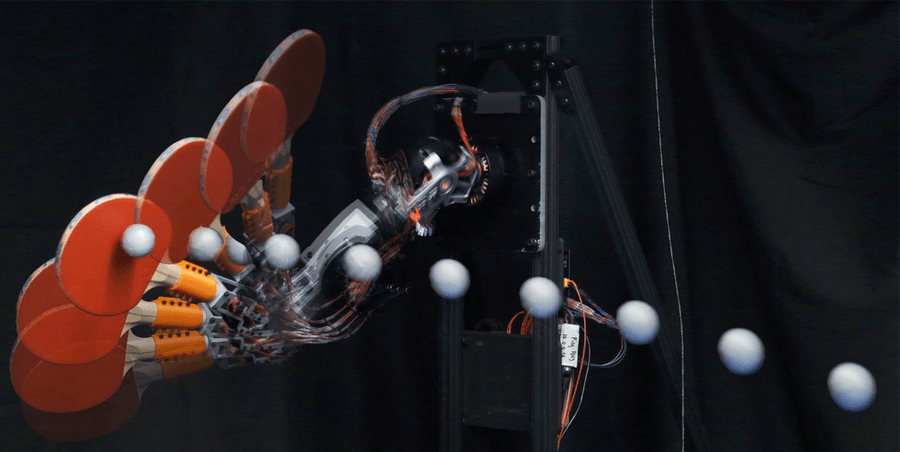
这款机器人由一个多关节机械臂和标准乒乓球拍组成,配合高速摄像头和高带宽预测控制系统,能够迅速估算来球的速度和轨迹,并执行各种击球方式——如弧圈球、直线球或削球。
该机器人在测试中展现了约88%的回球成功率,击球速度接近人类顶级选手水平,达到每秒19米(约42英里/小时)。最令人惊叹的是,它不仅能回球,还能精确地将球打到球台上的指定位置。
除了作为训练系统帮助人类球员提高技术外,这项技术还有望应用于更广泛的人形机器人领域,特别是在需要快速反应的搜救场景中,为机器人提供更敏捷、更精准的动态操作能力。
来源:https://news.mit.edu/2025/ping-pong-bot-returns-shots-high-speed-precision-0508
会走路的植物:自主寻光机器人花盆
这是一个让室内植物能够"自己走路"寻找阳光的创意项目。
创客MarinaXP为北向房间里的植物设计了一个四足机器人底座,让植物不再受限于固定位置的光照条件。
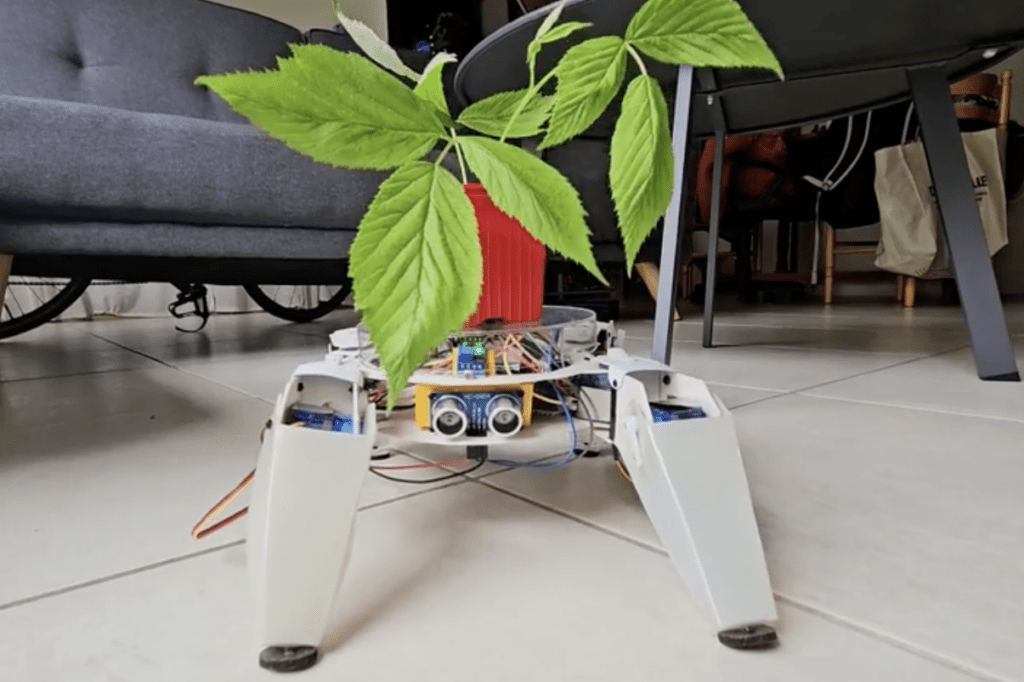
这个机器人花盆配备了Arduino Mega 2560控制器,通过光敏电阻可以感知房间内不同位置的光照强度,自动寻找并移动到光线最充足的地方。同时,它还装有超声波传感器来检测并避开障碍物。

这个聪明的设计让植物能够全天候享受最佳光照条件,即使房间内的光线随时间变化,植物也能"自己找到"最舒适的位置。
这是一个将自然与技术完美结合的智能家居创意,为室内植物养护提供了全新的解决方案。
来源:https://github.com/MarinaXP/LegsDayProject-PlantsEdition
ExoKit:让人人都能打造动力外骨骼的开源平台

ExoKit是一个面向初学者的动力外骨骼开发平台,由萨尔大学人机交互实验室团队开发。这个平台让开发者、工程师和研究人员无需"重新发明轮子",就能快速构建功能性外骨骼原型。
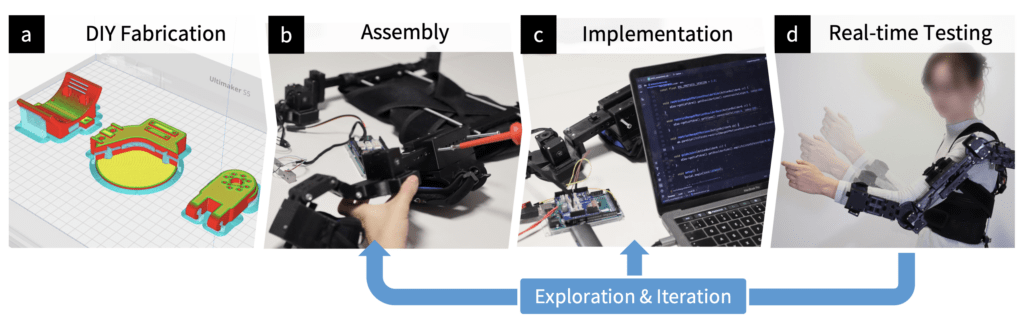
平台的亮点在于它采用了模块化设计,使用易获取的Dynamixel伺服电机和Arduino开发板(如Arduino Mega 2560)作为核心硬件。ExoKit还提供了可3D打印的机械部件设计文件,这些设计可根据不同需求进行修改。配套的Arduino固件库使得即使是编程经验有限的用户,也能轻松读取传感器数据并控制电机。
这一创新平台为动力外骨骼技术的普及和发展提供了坚实的基础,让这一前沿科技变得更加平民化。
来源:https://blog.arduino.cc/2025/05/09/exokit-is-a-novice-friendly-foundation-for-building-powered-exoskeletons/
3D打印遥控赛车
这款名为"蜥蜴"的3D打印遥控赛车几乎所有部件都可以通过3D打印实现。
赛车配备开放式差速器和独立悬挂系统,能够达到48公里/小时的最高速度,并且续航时间超过30分钟。
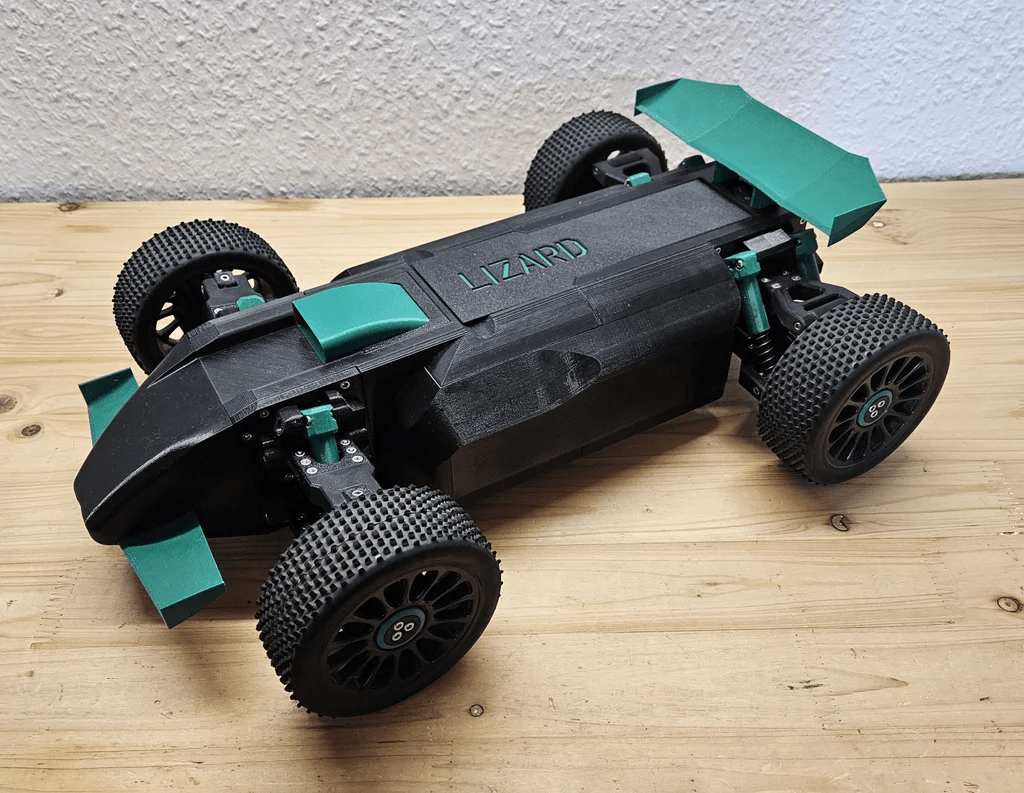
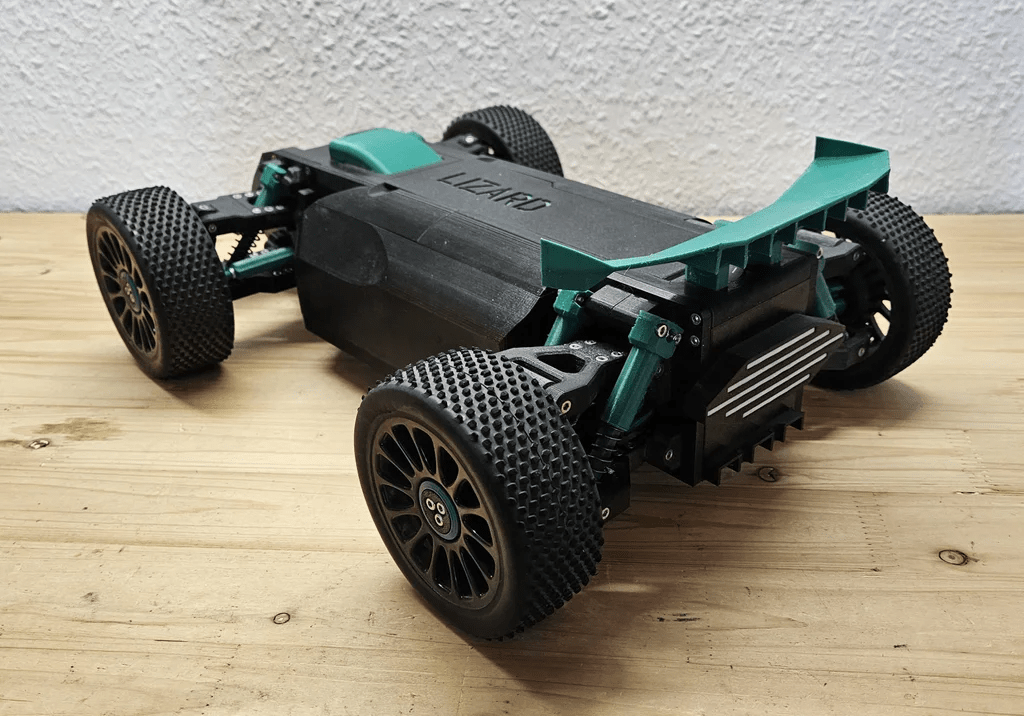
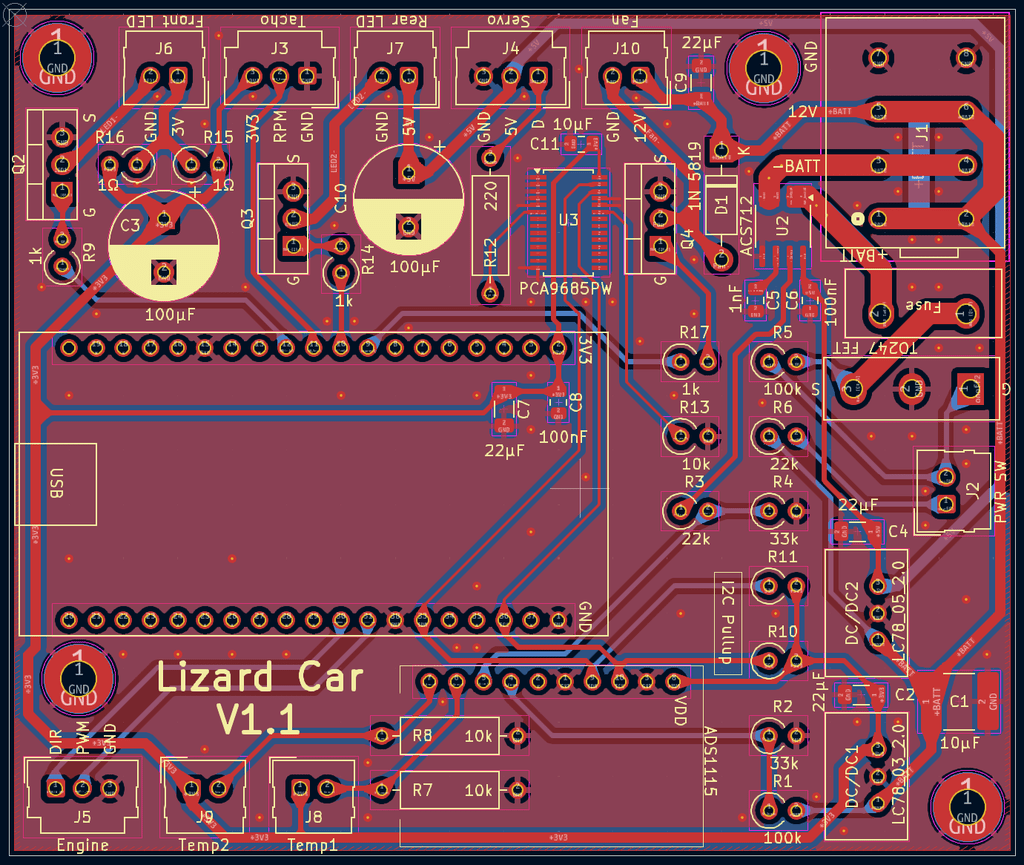
赛车最大的亮点在于其完全自定义的电子系统,基于ESP32微控制器,让用户可以根据个人喜好调整驾驶特性。
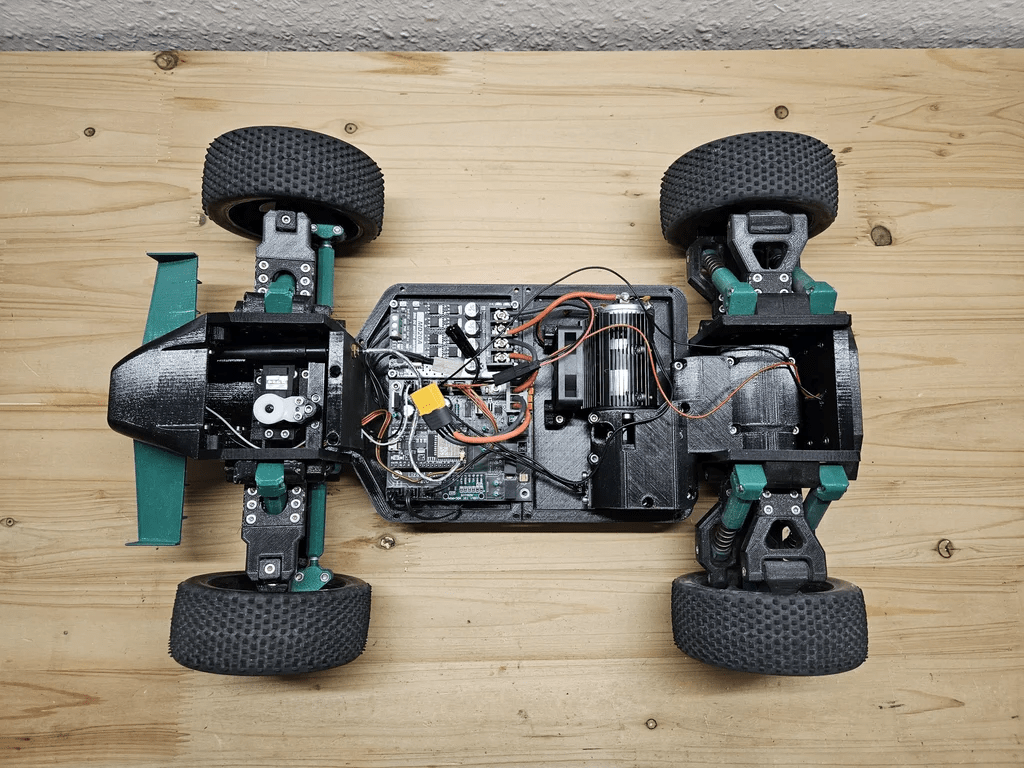
车辆内置多种传感器,可以监测电池电压、电流消耗、电机温度以及速度等数据,并通过遥控器实时显示这些信息。

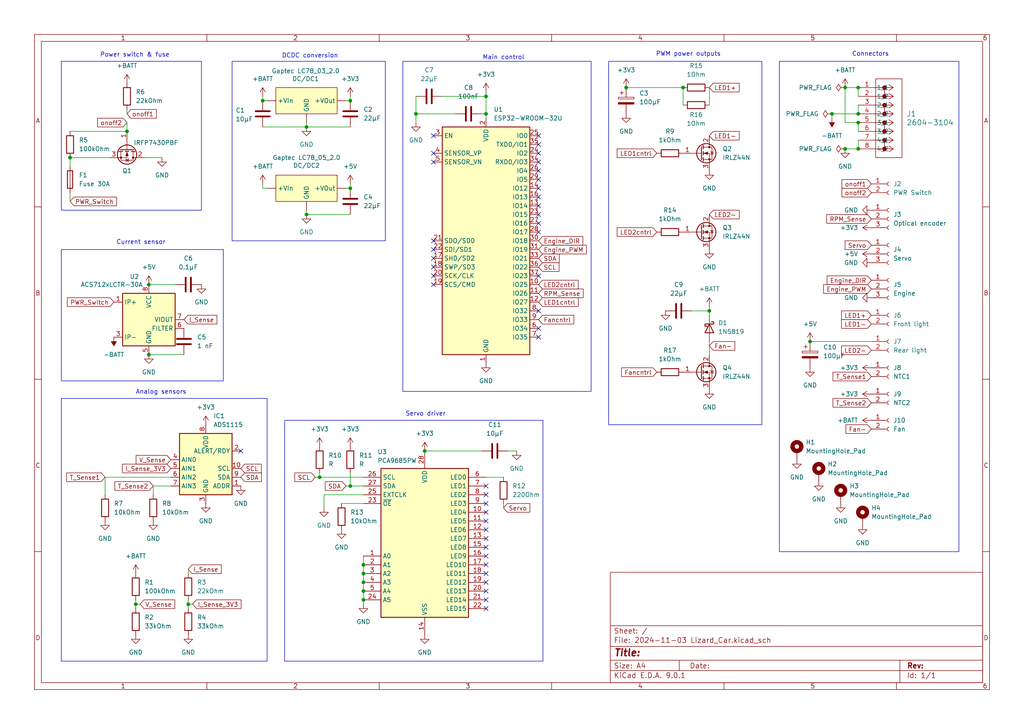
控制系统提供多种驾驶模式选择,包括开环PWM控制、闭环扭矩控制和闭环速度控制,甚至还可以设置电流限制来保护传动系统。
虽然这款车的制作成本比商业遥控车高,但它提供了非常棒的定制性和可维修性。任何损坏的部件都可以快速便宜地更换,这对于喜欢调试和优化遥控车的爱好者来说是一个非常不错的项目。
来源:https://www.instructables.com/Lizard-3D-Printed-RC-Race-Car/
ESP32DIV: 多频段无线安全工具
这是一款基于ESP32的开源多频段无线工具包,集成了Wi-Fi、蓝牙、2.4GHz和Sub-GHz频段的多种功能于一体。

无论你是对无线安全感兴趣的创客,还是需要进行无线协议研究的技术爱好者,ESP32DIV都能满足你的需求。它不仅可以监测周围的无线信号,还能进行信号分析、干扰测试和协议模拟。

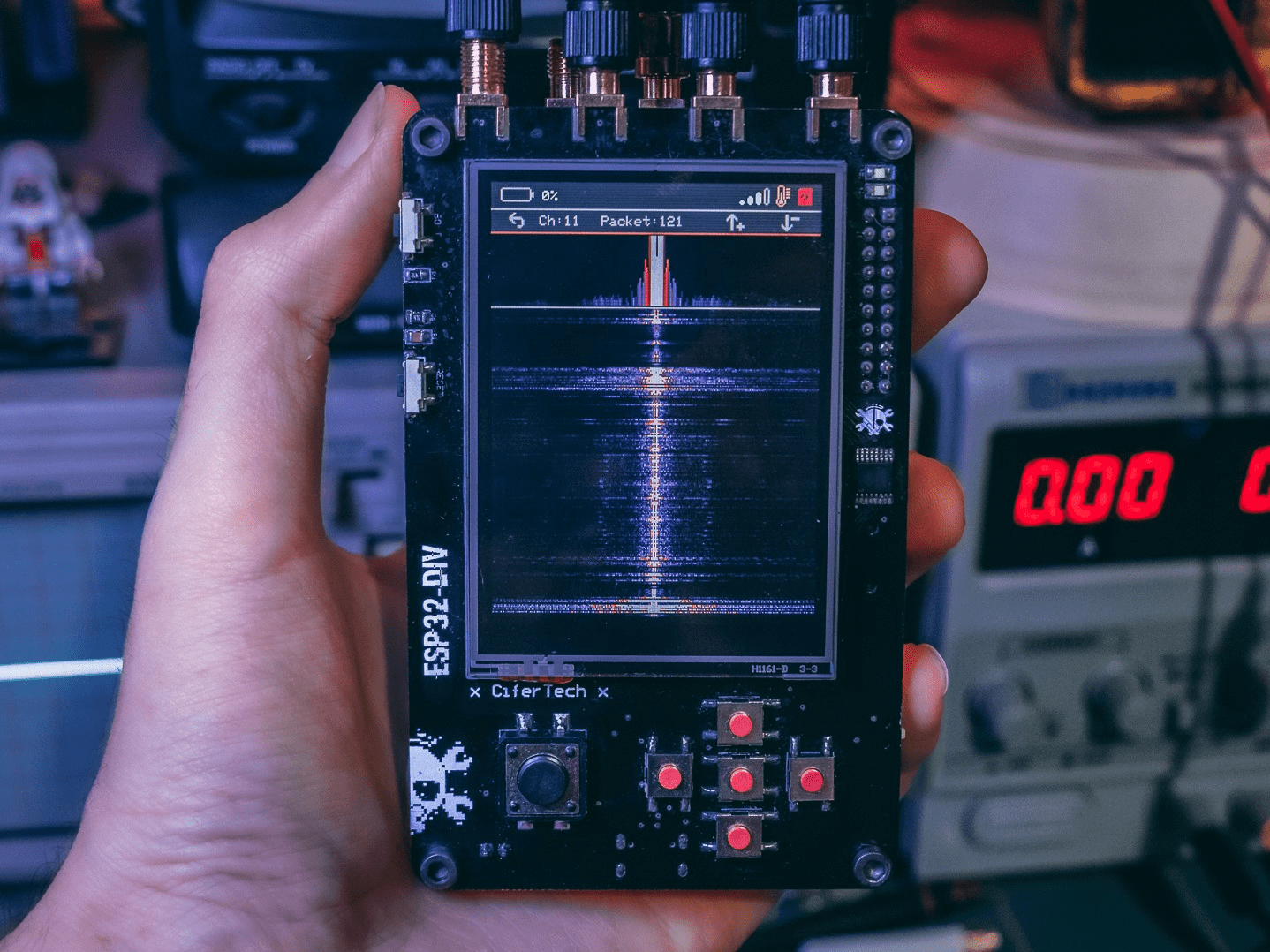
最令人印象深刻的是它的多功能性——从Wi-Fi解除认证攻击检测到Sub-GHz信号回放,从蓝牙干扰到2.4GHz频谱分析,这个小巧的设备几乎涵盖了所有常见的无线安全测试场景。
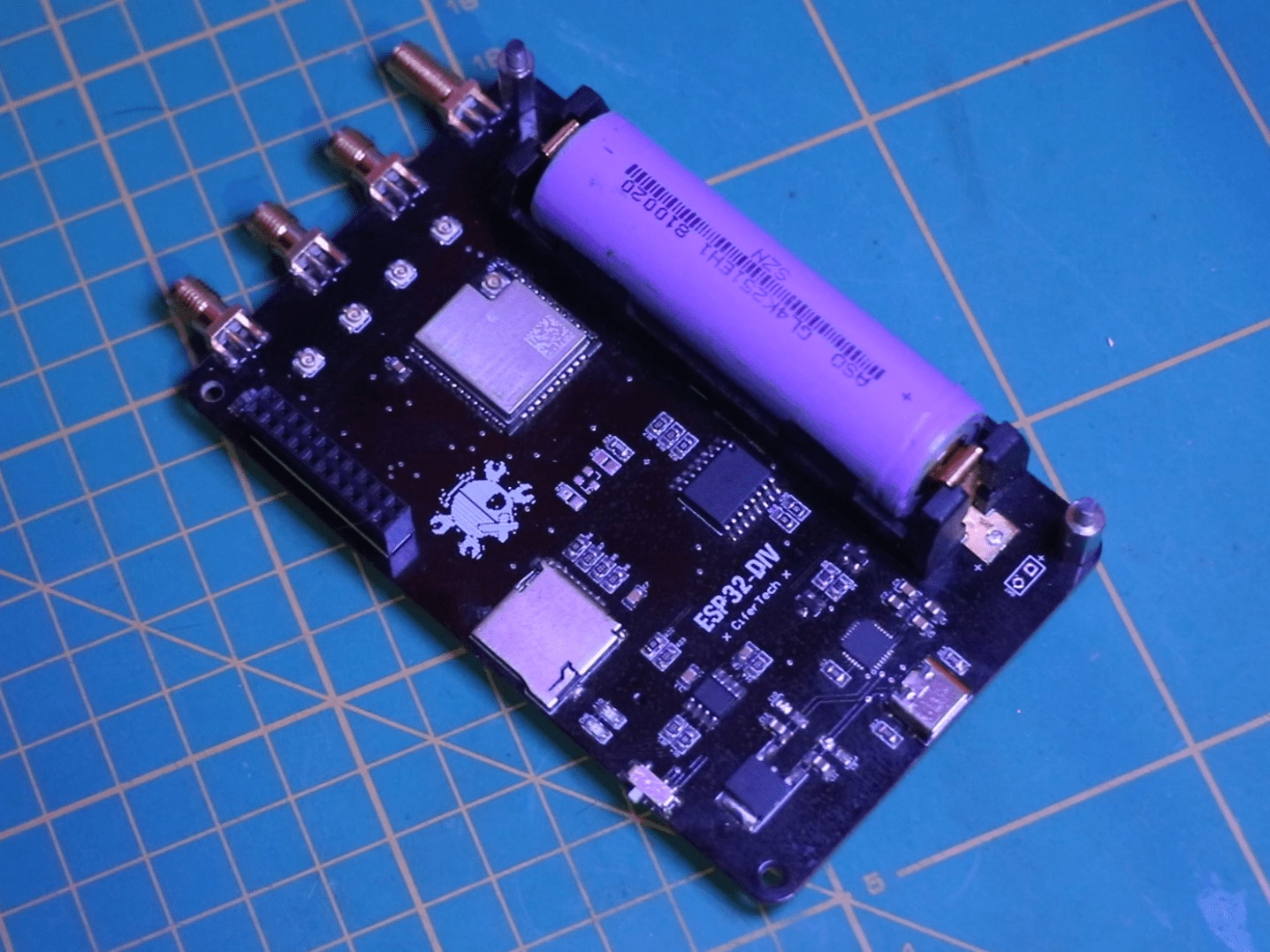
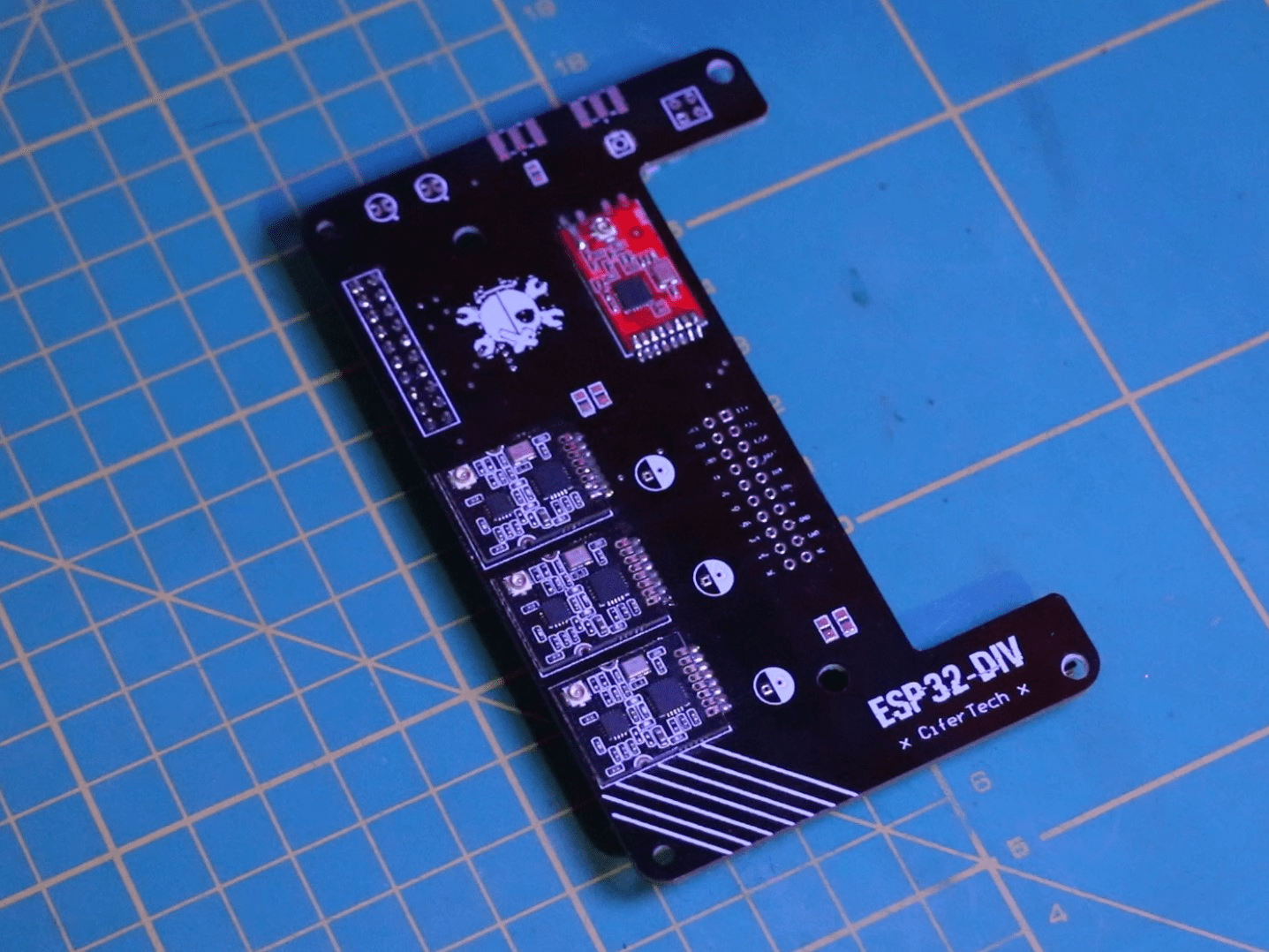
硬件由主板和扩展板构成,搭配直观的显示界面,让复杂的无线安全测试变得相对容易。
来源:https://github.com/cifertech/ESP32-DIV


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









