







个人觉得讲的蛮好的入门资料,用笔记总结一下。
基本概念
(1)随机变量 Random Variable
大写字母:随机变量 小写字母:观测值

(2) Randomness in RL:
Actions have randomness.
States transitions have randomness.
 (3)Return
(3)Return
Return
U
t
U_{t}
Ut: cumulative future reward

 Given
s
t
s_{t}
st, the return
U
t
U_{t}
Ut依赖于随机变量
A
t
A_{t}
At … and
S
t
+
1
S_{t+1}
St+1 …
Given
s
t
s_{t}
st, the return
U
t
U_{t}
Ut依赖于随机变量
A
t
A_{t}
At … and
S
t
+
1
S_{t+1}
St+1 …
(4)Value Functions
把
U
t
U_{t}
Ut 当作未来所有动作a和状态s的函数,动作a和状态s都有随机性
-动作a的概率密度函数是policy function
π
(
a
∣
s
)
\pi(a|s)
π(a∣s)
-状态s是状态转移函数State transition function
p
(
s
′
∣
s
,
a
)
p(s'|s,a)
p(s′∣s,a)
- Action Value Function
对 U t U_{t} Ut 求期望,将随机性用积分积掉(除了 s t s_{t} st 和 a t a_{t} at 其余随机变量都被积掉),得到动作-价值函数
动作-价值函数
Q
π
(
s
t
,
a
t
)
Q_{\pi}(s_{t},a_{t})
Qπ(st,at)依赖于
s
t
s_{t}
st 和
a
t
a_{t}
at,还与policy函数
π
\pi
π有关。不同的policy函数
π
\pi
π会有不同的
Q
π
Q_{\pi}
Qπ。
直观意义是:如果用policy函数
π
\pi
π, 在状态
s
t
s_{t}
st下做动作
a
t
a_{t}
at是好还是坏。已知policy函数
π
\pi
π,
Q
π
(
s
t
,
a
t
)
Q_{\pi}(s_{t},a_{t})
Qπ(st,at)会给当前状态下所有action打分。

- Optimal action-value function
Q
∗
(
s
t
,
a
t
)
Q^{*}(s_{t},a_{t})
Q∗(st,at)
把 π \pi π去掉的方法: Q π ( s t , a t ) Q_{\pi}(s_{t},a_{t}) Qπ(st,at)最大化,取得使 Q π ( s t , a t ) Q_{\pi}(s_{t},a_{t}) Qπ(st,at)最大化的 π \pi π
Q ∗ ( s t , a t ) Q^{*}(s_{t},a_{t}) Q∗(st,at)与policy π \pi π无关,在状态 s t s_{t} st的情况下,对动作 a t a_{t} at作评价

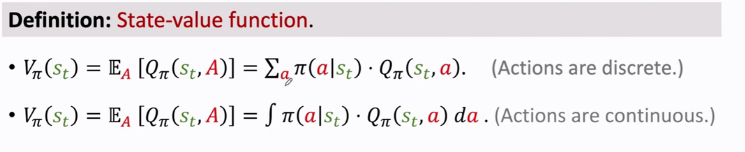
- State-Value Function V ( s ) V(s) V(s)

状态价值函数
V
(
s
)
V(s)
V(s)是对
Q
π
(
s
t
,
a
t
)
Q_{\pi}(s_{t},a_{t})
Qπ(st,at)求期望,A作为随机变量,对A求期望,把A消掉得到
V
π
(
s
t
)
V_{\pi}(s_{t})
Vπ(st),只与
π
\pi
π和
s
t
s_{t}
st有关。
V
π
(
s
t
)
V_{\pi}(s_{t})
Vπ(st)的直观意义:用于评价当前局势好坏。
 对A求期望,A的概率密度是
π
(
⋅
∣
s
t
)
\pi( \cdot |s_{t})
π(⋅∣st),根据期望的定义,可以把期望写成连加(动作离散)或积分(动作连续)的形式。
对A求期望,A的概率密度是
π
(
⋅
∣
s
t
)
\pi( \cdot |s_{t})
π(⋅∣st),根据期望的定义,可以把期望写成连加(动作离散)或积分(动作连续)的形式。
 小结:
小结:
 (5)How does AI control the agent:
(5)How does AI control the agent:
Two methods:
Policy-Based Learning 策略学习 v.s. Value-Based Learning价值学习

-
Summary

[1] https://www.bilibili.com/video/BV1BE411W7TA?t=864















 406
406











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









