









Lecture 7: VC Dimension VC维
7.1 Definition of VC Dimension VC维的定义
复习1
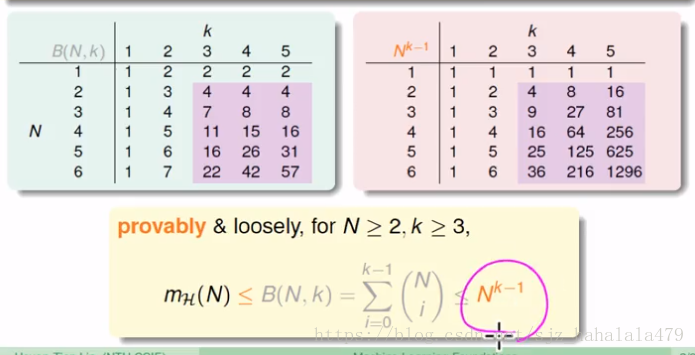
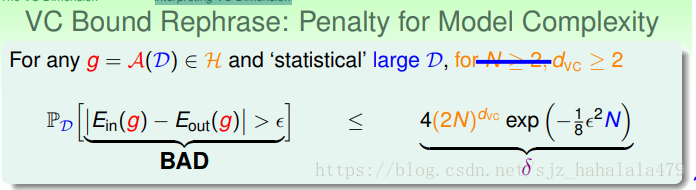
上节课,林教授讲到了,当样本 N N 足够大,且成长函数存在断点 k k 时,可以概率性地推出
即
复习2 VC边界
对演算法
A
A
在数据空间上选择的任何假设
g
g
,当在统计学意义上足够大时,这个假设是坏假设的几率是
所以,如果
-
mH(N)有断点k,H是好的假设 m H ( N ) 有 断 点 k , H 是 好 的 假 设
-
N足够大,D是好的数据集 N 足 够 大 , D 是 好 的 数 据 集
以上两点推出,Ein≃Eout E i n ≃ E o u t - 如果,演算法 A A 选择了一个有小的 g g ,是好的演算法
有了上面三条,再加上好运气,我们就学到了好的规律!!
vc维定义
- vc维是最大的非断点的正式名称
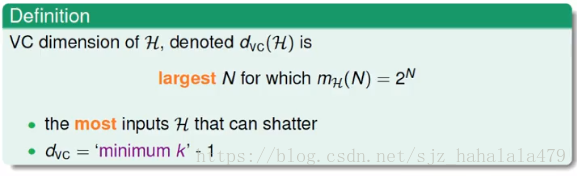
假设函数 H H 的VC维,记为,是使得成长函数 mH(N)=2N m H ( N ) = 2 N 最大的N,即
- 假设函数 H H 可以shatter的最多的输入数量
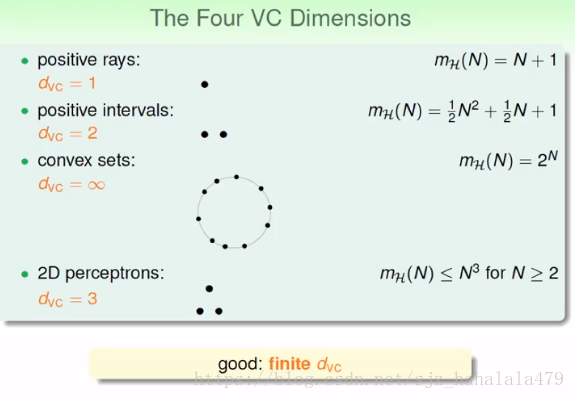
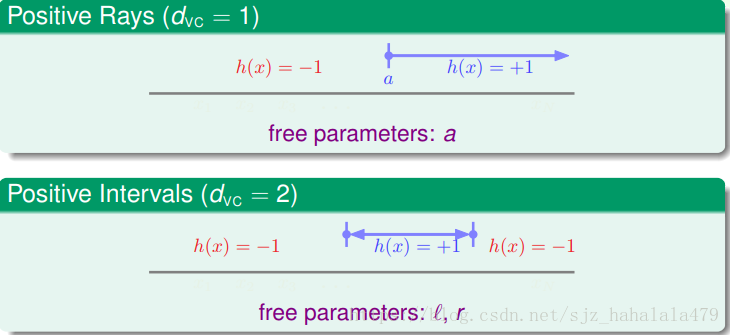
如下图,这是上节课提出的几个例子:
所以,如果我们有有限个VC维的话,就可以推出不论选择哪个 g g ,都能够保证,而不用关心
- 演算法 A A 长什么样。
- 样本分布长什么样。
- 目标函数 f f 长什么样。
7.2 VC dimension for perceptrons 感知器的VC维
矩阵相关
开始之前,我们先复习两个矩阵相关的概念。
逆矩阵
则称,B为A的逆矩阵,A为可逆矩阵。
则
称
,
B
为
A
的
逆
矩
阵
,
A
为
可
逆
矩
阵
。
注:E为单位矩阵。
注
:
E
为
单
位
矩
阵
。
举个例子:
求
A
A
的逆矩阵。
解:
假设
所以,
得到,
线性相关
设
a1,a2,...am
a
1
,
a
2
,
.
.
.
a
m
为一组
n维向量
n
维
向
量
,若存在一组不全为0的实数
k1,k2,...km
k
1
,
k
2
,
.
.
.
k
m
,使得
则称向量组 a1,a2,...,am a 1 , a 2 , . . . , a m 线性相关,反之,线性无关。
将向量组写成矩阵,如何通过矩阵的性质判断向量组是线性相关还是线性无关呢?
- 将矩阵进行初等行变换,化为阶梯型矩阵,若非零行的行数等于向量的个数,即矩阵满秩,则为向量组线性无关;若非零行行数小于向量个数,即矩阵非满秩,则向量组线性相关。
感知器的vc维
首先我们来回顾一下二维感知器:
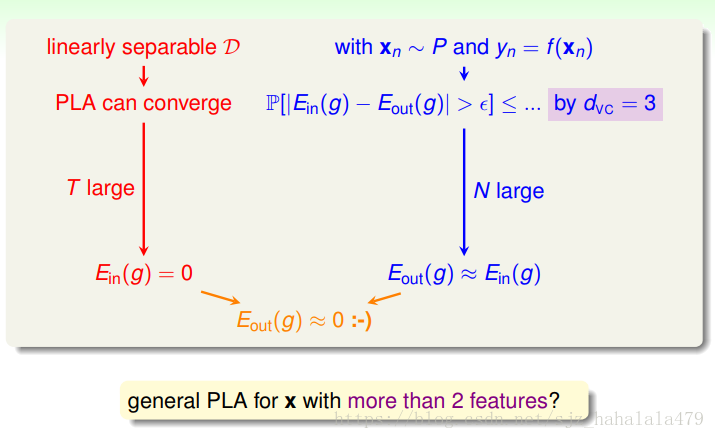
在线性可分的情况下,PLA是可以找到最佳的
g
g
的,当迭代次数足够大时,我们能保证
Ein(g)=0
E
i
n
(
g
)
=
0
;
在之前关于机器学习可行性的论证中,二维线性分割问题的vc维等于3是有限的,在训练样本
N
N
足够大时,
所以,我们能推出,在二维线性可分问题中, PLA的 Eout(g)≃0 E o u t ( g ) ≃ 0 。
现在,我们提出一个问题,PLA在多维情况下仍旧可行吗?
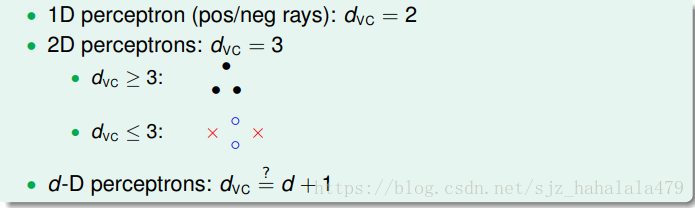
注意到一维的感知机
dvc=2
d
v
c
=
2
,二维的感知机
dvc=3
d
v
c
=
3
;
猜想,
D
D
维的感知机
如何验证这个猜想呢?分为两步:
- 验证 dvc≥d+1 d v c ≥ d + 1
- 验证 dvc≤d+1 d v c ≤ d + 1
首先证明
dvc≥d+1
d
v
c
≥
d
+
1
,因为
vc
v
c
维的定义是,能够被shatter的最大输入数量;如果我们能找到至少1个
d
d
维的能shatter的最大输入数量是的情形,那么就可以说
dvc≥d+1
d
v
c
≥
d
+
1
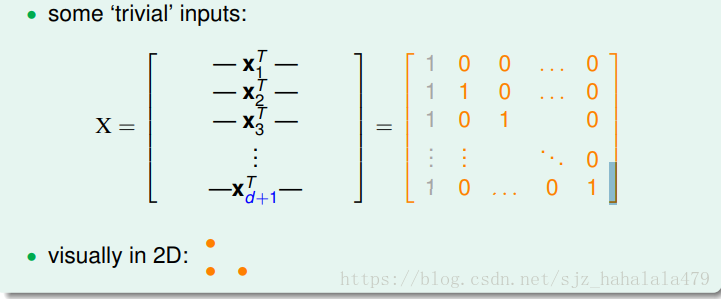
我们构造一个有
d+1
d
+
1
个inputs的
d
d
维矩阵:
第一个input向量代表原点,有d个0;其余d行向量分别代表某一维值为1,其它维值为0的向量。
注意到图中灰色的一列,我们给向量的左边添加一列常数1,代表threshold。
当
d=1
d
=
1
时:
可见 d+1=2 d + 1 = 2 个inputs是shatter的
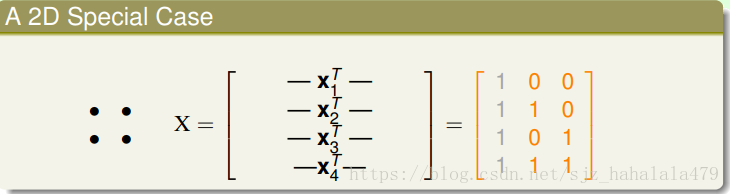
当 d=2 d = 2 时:
也就是说在二维平面直角坐标系上,是(0,0),(1,0)和(0,1)三个点,我们在几何上可以很容易证明,这三个点是shatter的。
我们说
d+1
d
+
1
个inputs是shatter的,就是说假设空间中,包含输出
y
y
的全排列,就是对任意的,
总能找到一个 w w ,使得 成立。
注意到我们构造的矩阵是可逆的,所以 wX=y→w=X−1y w X = y → w = X − 1 y 总是成立的。
这里我们证明了第一个不等式,即我们找到了d维的d+1个inputs可以被shatter。
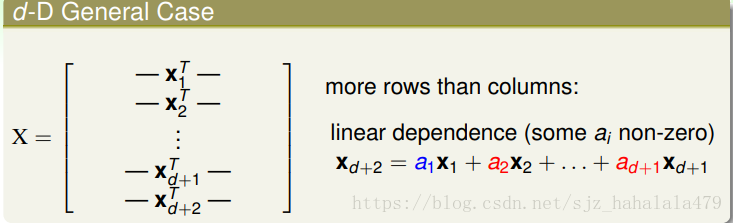
如何证明 dvc<=d+1 d v c <= d + 1 呢?我们需要证明,对d维的任意 d+2 d + 2 个输入来说,都是不能被shatter的。
考虑一个二维的例子, d=2,d+2=4 d = 2 , d + 2 = 4 ,也就是4行2列的矩阵,我们在左边偷偷再加一列常数1表示threshold,这样就构成了一个4行3列的矩阵。
这四个点在平面直角坐标系上的表示,分别是(0,0),(1,0),(0,1),(1,1),根据以前的学习,我们知道这四个点是不能被shatter的。
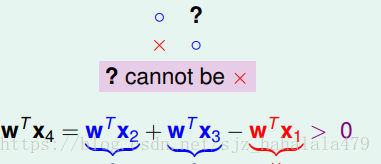
也就是说,如果我们定好了另外三个点分别是圈、叉、圈,第四个点一定不能是叉,只能是圈,用线性代数表示:
从矩阵的角度来说,如果一个矩阵的行数大于列数,这个矩阵的向量组是线性相关的。
这里假设,
an
a
n
与
wTxn
w
T
x
n
的符号相同,也就是说,我们假设
a1
a
1
是正的,
a2,a3....,ad+1
a
2
,
a
3
.
.
.
.
,
a
d
+
1
是负的,那么

根据负负得正, wTxd+2 w T x d + 2 一定大于0;也就是说,不存在 xd+2 x d + 2 为叉叉的情况,这样已经证明出, d+2 d + 2 个inputs是不能被shatter的,所以 dvc<=d+1 d v c <= d + 1
所以,我们证明了d维的感知机模型, dvc=d+1 d v c = d + 1 。
7.3 Physical Intuition of VC Dimension vc维的直观物理解释
- 假设的参数 w w 代表了自由程度(degrees of freedom),参数越多,代表假设空间函数的可调节能力越强。
- 假设的数量,,可以类比成自由程度。
- 上一小节提到的vc维,可以理解为有效地二元分割的自由程度。
- 根据经验,虽然不是总这样, dvc d v c 的值和自由参数个数是相等的。
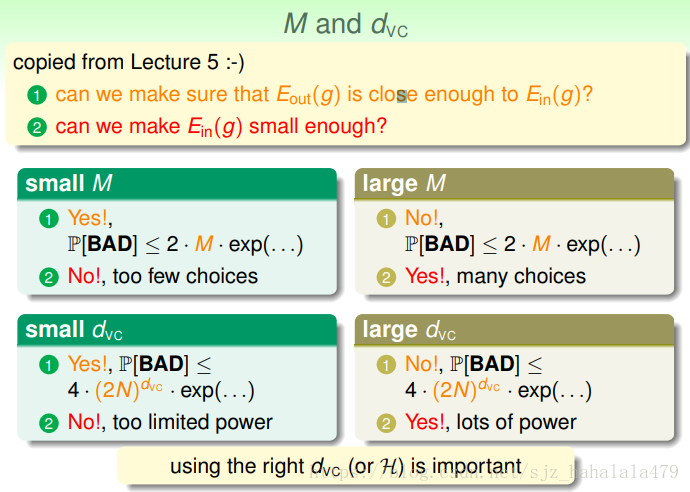
第五节课曾经讨论过 M M 和机器学习两个核心问题的关系,将转换为 dvc d v c ,结论类似。
- dvc d v c 小时,坏事情发生的概率右边界小,也就是说我们有极高的概率保证 Eout≈Ein E o u t ≈ E i n ,但是同时因为 dvc d v c 较小,可以选择的 H H 也少了,所以不能保证足够小。
- 反之如是。
所以选择一个合适的 dvc d v c ,或者说合适的假设空间 H H ,或者说合适的模型,是十分重要的。
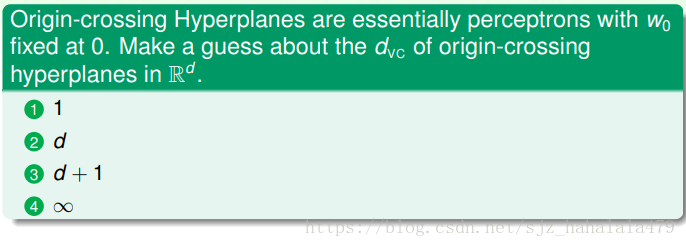
Fun Time问题是,经过原点的也就是说固定为0的感知器模型的 dvc d v c 是多少?这个问题可以从自有参数与 dvc d v c 的关系入手,因为自由参数少了一个,所以 dvc d v c 也相应地减1。答案是2,d。
7.4 Interpreting VC Dimension VC维的解释
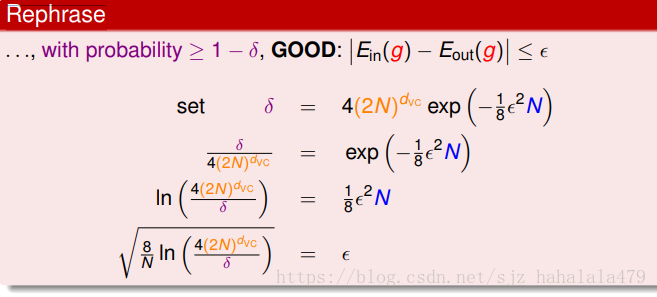
在深入解释vc维之前,我们先来回顾一下vc边界。vc边界指坏事发生的概率的右边界,用 δ δ 表示。
换个说法,好事情发生概率的左边界就是
1−δ
1
−
δ
,即
用 δ δ 表示 ϵ ϵ ,得到
也就是说,在
1−δ
1
−
δ
的概率下:
去掉绝对值,
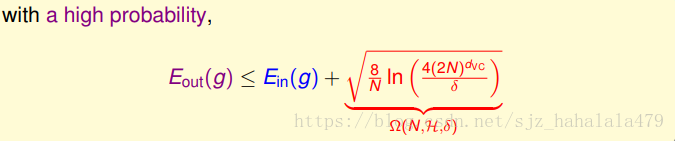
我们重点关注右边界,使用 Ω(N,H,δ) Ω ( N , H , δ ) 表示根号项的一大串内容,视为模型复杂度的惩罚项。
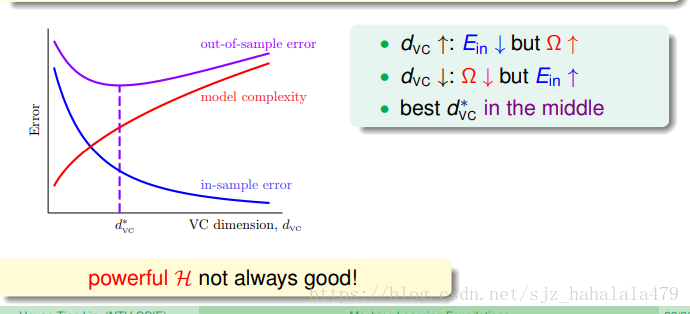
左图横轴是 dvc d v c ,纵轴是Error。
- 随着 dvc d v c 的增大, Ein E i n 是减小的。可以这么理解, dvc d v c 增大了,代表假设空间中可供选择的 g g 变多了,也就更容易找到小的。
- 根据公式, dvc d v c 增大,模型复杂度也在增大。
- Eout E o u t 根据前两个的走势,大致呈现山谷形。
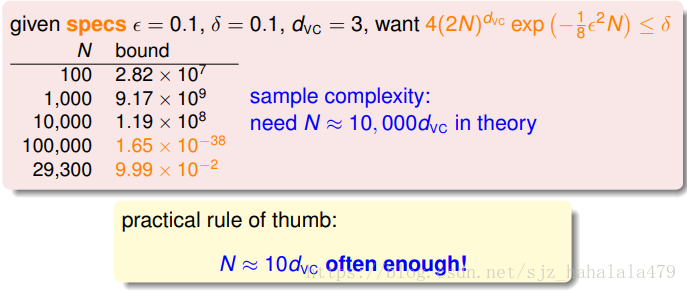
给定一些参数,计算需要训练样本
N
N
的值,我们发现,理论上样本,但是经验上,
N=10dvc
N
=
10
d
v
c
就可以了。
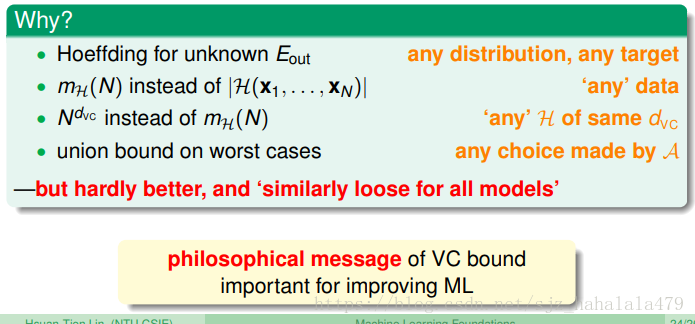
所以说我们的vc bound是十分宽松的,那它为什么如此宽松呢?原因如图。
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









