









题目
给定包含多个点的集合,从其中取三个点组成三角形,返回能组成的最大三角形的面积。
示例:
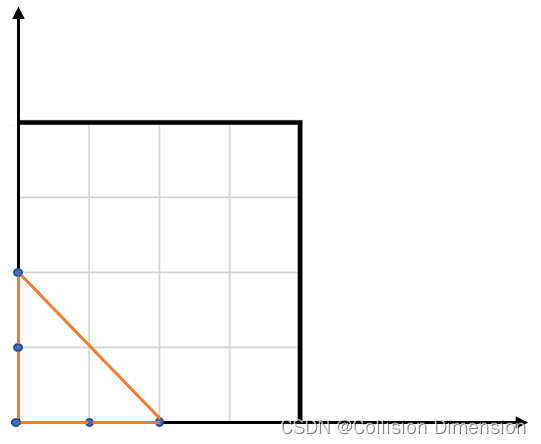
输入: points = [[0,0],[0,1],[1,0],[0,2],[2,0]]
输出: 2
解释:
这五个点如下图所示。组成的橙色三角形是最大的,面积为2。
凸包(又回到我们最熟悉的凸包咯!)
思路与算法
我们先使用Andrew 算法求出所有点对应的凸包convexHull,参考官方题解「587. 安装栅栏」的凸包算法。
如果三角形的某一点不在凸包上,我们以其余两点的边为底,那么我们总可以在凸包上找到一个点,使得该点到此边的高大于原来的点到此边的高,因此面积最大的三角形的三个点都在凸包上。
在凸包convexHull 上枚举三角形,先枚举点 i,然后枚举点 j,最后枚举点 k,其中i<j<k。
在固定点 i 和 j 后,三角形的面积与 k 的关系是一个凸曲线,因此三角形只在 k 为极点时面积最大。在固定点i时,该极点在随点 j 增大而增大,因此在搜索极点只需要从上次的极点位置开始搜索。
所以我们不需要枚举点k,只需要搜索点i和j对应的极点,然后求解三角形面积。返回最大的三角形面积。
class Solution {
private:
int cross(const vector<int> & p, const vector<int> & q, const vector<int> & r) {
return (q[0] - p[0]) * (r[1] - q[1]) - (q[1] - p[1]) * (r[0] - q[0]);
}
vector<vector<int>> getConvexHull(vector<vector<int>>& points) {
int n = points.size();
if (n < 4) {
return points;
}
/* 按照 x 大小进行排序,如果 x 相同,则按照 y 的大小进行排序 */
sort(points.begin(), points.end(), [](const vector<int> & a, const vector<int> & b) {
if (a[0] == b[0]) {
return a[1] < b[1];
}
return a[0] < b[0];
});
vector<vector<int>> hull;
/* 求出凸包的下半部分 */
for (int i = 0; i < n; i++) {
while (hull.size() > 1 && cross(hull[hull.size() - 2], hull.back(), points[i]) <= 0) {
hull.pop_back();
}
hull.emplace_back(points[i]);
}
int m = hull.size();
/* 求出凸包的上半部分 */
for (int i = n - 2; i >= 0; i--) {
while (hull.size() > m && cross(hull[hull.size() - 2], hull.back(), points[i]) <= 0) {
hull.pop_back();
}
hull.emplace_back(points[i]);
}
/* hull[0] 同时参与凸包的上半部分检测,因此需去掉重复的 hull[0] */
hull.pop_back();
return hull;
}
double triangleArea(int x1, int y1, int x2, int y2, int x3, int y3) {
return 0.5 * abs(x1 * y2 + x2 * y3 + x3 * y1 - x1 * y3 - x2 * y1 - x3 * y2);
}
public:
double largestTriangleArea(vector<vector<int>> & points) {
auto convexHull = getConvexHull(points);
int n = convexHull.size();
double ret = 0.0;
for (int i = 0; i < n; i++) {
for (int j = i + 1, k = i + 2; j + 1 < n; j++) {
while (k + 1 < n) {
double curArea = triangleArea(convexHull[i][0], convexHull[i][1], convexHull[j][0], convexHull[j][1], convexHull[k][0], convexHull[k][1]);
double nextArea = triangleArea(convexHull[i][0], convexHull[i][1], convexHull[j][0], convexHull[j][1], convexHull[k + 1][0], convexHull[k + 1][1]);
if (curArea >= nextArea) {
break;
}
k++;
}
double area = triangleArea(convexHull[i][0], convexHull[i][1], convexHull[j][0], convexHull[j][1], convexHull[k][0], convexHull[k][1]);
ret = max(ret, area);
}
}
return ret;
}
};
复杂度分析
时间复杂度:O(n^2),其中 n 是数组points 的长度。Andrew 算法的时间复杂度为O(nlogn),在凸包上枚举三角形的时间复杂度为 O(n^2)。
空间复杂度:O(n)。Andrew 算法的空间复杂度为O(n),保存凸包需要O(n) 的空间。
三角形面积计算
















 1603
1603











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









