






基于PID的速度跟踪控制算法
#智能车辆速度跟踪控制carsim simulink联合仿真推荐版本carsim8. 1simulink2016b
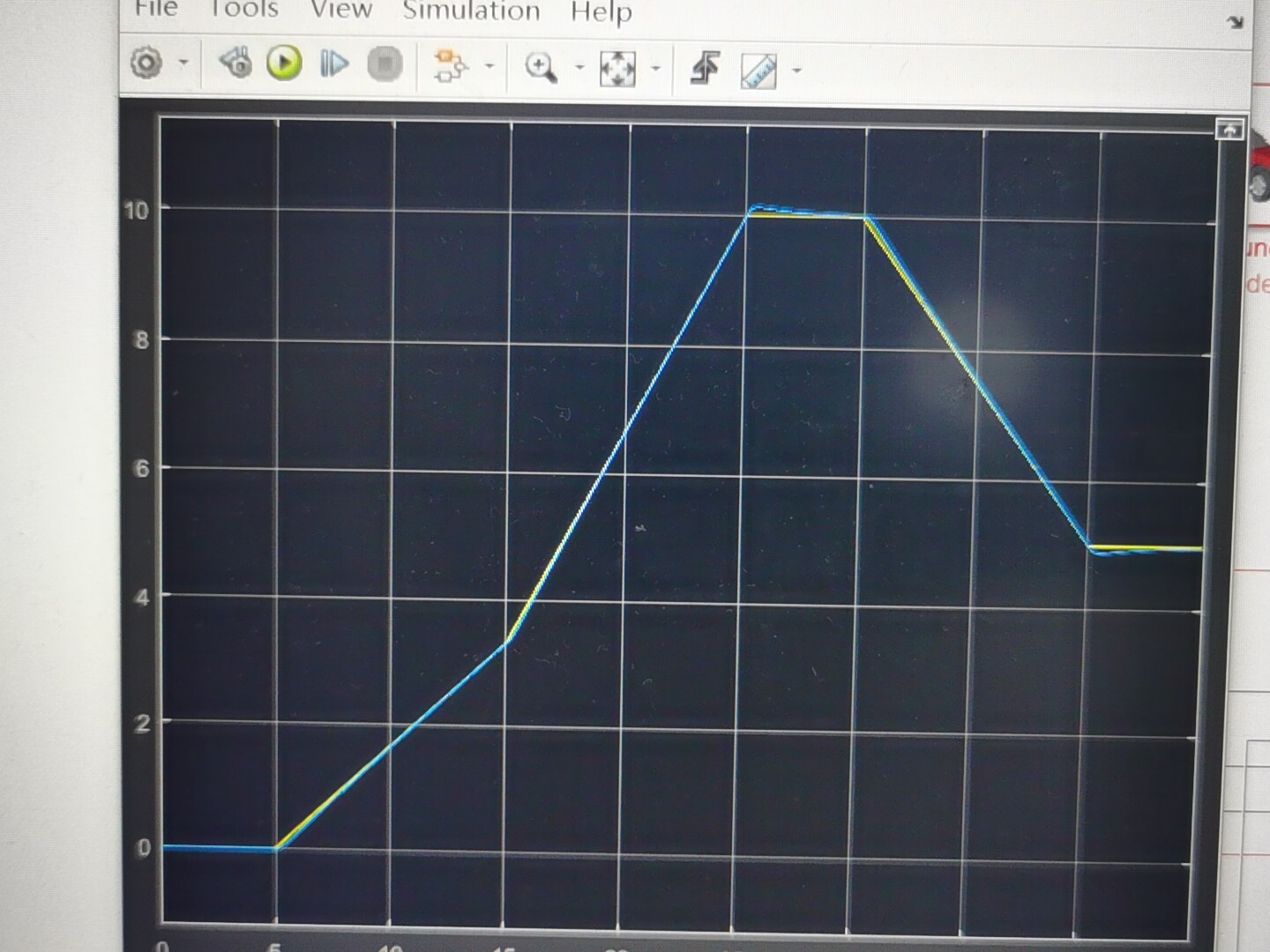
可以跟踪期望速度曲线
算法鲁棒性比可以免费讲解carsim 以及simulink联防相关知识好
本算法仅供学习,入门
有技术指导,后期服务好
可以跟踪
ID:5140624233511184
xhusj
基于PID的速度跟踪控制算法
智能车辆速度跟踪控制一直是无人驾驶领域中的关键问题,其目标是通过控制输入来使车辆在给定的速度曲线下行驶。而PID控制算法被广泛应用于这一领域,通过对车辆的速度误差、积分误差和微分误差进行调节,实现对车辆速度的精确控制。
在智能车辆的速度跟踪控制中,Carsim和Simulink的联合仿真被推荐作为最佳实践版本,Carsim 8.1和Simulink 2016b的结合能够提供一套全面且强大的工具,以实现对速度跟踪控制算法的设计与验证。
基于PID控制算法的速度跟踪控制具备高度的鲁棒性和稳定性,能够在不同工况下对车辆速度进行精确控制。而Carsim和Simulink联合仿真能够免费讲解这一控制算法,并提供相关知识的学习资源。通过对Carsim和Simulink联合仿真的学习,我们可以深入了解控制算法的原理和实现方式,提升对智能车辆速度跟踪控制的理解。
需要强调的是,本算法仅供学习和入门使用,而非商业应用。对于进一步的技术指导和后期服务,我们提供专业的支持和指导,以确保学习和应用过程的顺利进行。
基于PID的速度跟踪控制算法能够准确地跟踪期望速度曲线,通过调节PID控制器的参数,我们可以实现对车辆速度的精确控制。PID控制算法的鲁棒性和稳定性使其成为智能车辆速度跟踪控制中的理想选择。
总结起来,基于PID的速度跟踪控制算法是智能车辆领域中的重要研究方向。Carsim和Simulink联合仿真是推荐版本,能够提供全面的工具支持。该算法具备高鲁棒性和稳定性,仅供学习和入门使用。我们提供技术指导和后期服务,以确保学习和应用的顺利进行。通过基于PID的速度跟踪控制算法,我们能够准确跟踪期望速度曲线,实现对智能车辆速度的精确控制。
以上就是关于基于PID的速度跟踪控制算法的介绍和解析,希望能为广大程序员提供一些技术分享和启发。感谢阅读!
相关的代码,程序地址如下:http://imgcs.cn/624233511184.html



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









