









目录
1.程序功能描述
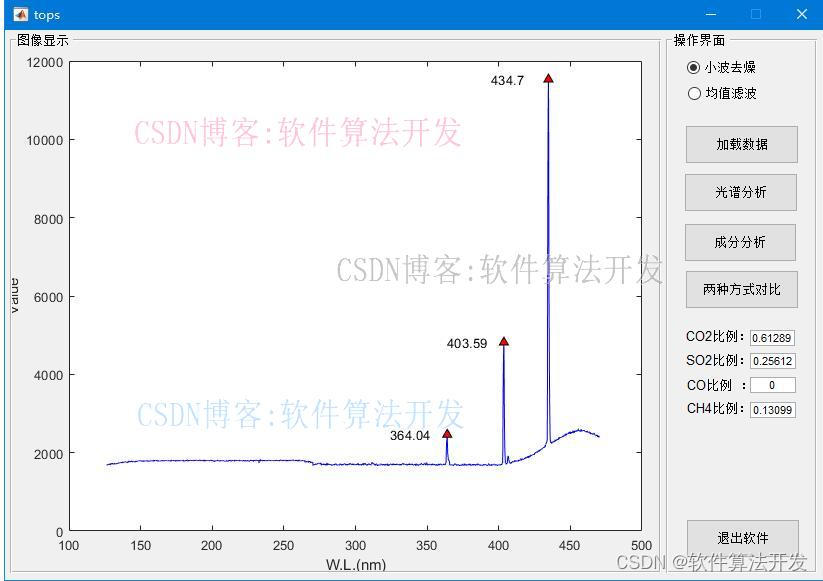
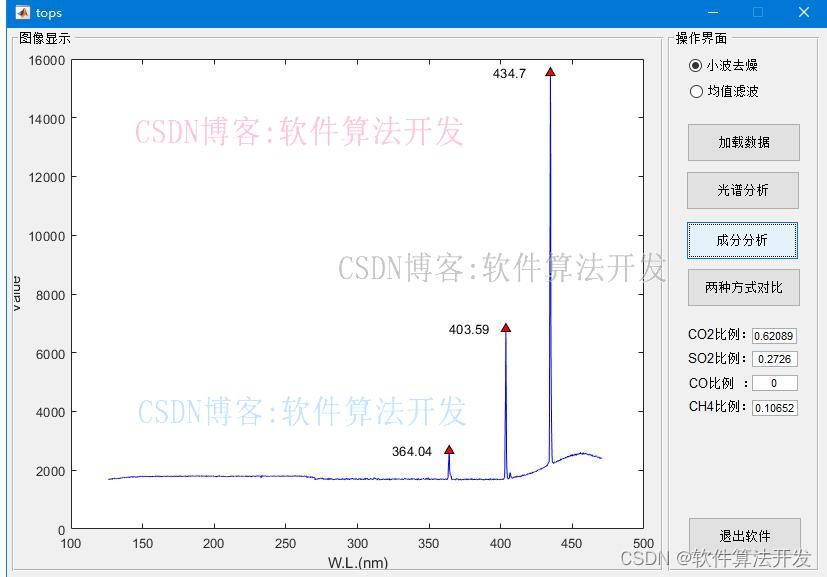
基于小波变换和峰值搜索的光谱检测matlab仿真,带GUI界面.对光谱数据的成分进行提取,分析CO2,SO2,CO以及CH4四种成分比例。
2.测试软件版本以及运行结果展示
MATLAB2022A版本运行
3.核心程序
.....................................................................
for i=1:length(Astart)
plot([WL(Astart(i)),WL(Astart(i))],...
[Ds(Astart(i))*4,Fspectrum(Astart(i))],':r')
hold on
plot([WL(Aend(i)),WL(Aend(i))],...
[Ds(Aend(i))*4,Fspectrum(Aend(i))],':g')
hold on
X_point=[WL(Astart(i)),WL(Aend(i))];
Y_point=[Fspectrum(Astart(i)),Fspectrum(Aend(i))];
plot(X_point,Y_point,':k','Linewidth',2)
hold on
end
hold off
legend('original spectrum','derivative spectrum');
xlabel('wavelength')
ylabel('Reflectance(%)')
%光谱寻峰
Locs = func_findpeaks(As,option);
axes(handles.axes1);
plot(data1(:,1),As,'Color','blue');
hold on;
plot(data1(Locs,1),As(Locs),'k^','markerfacecolor',[1 0 0]);
hold on
for i = 1:length(Locs)
text(data1(Locs(i),1)-40,As(Locs(i))+20,num2str(data1(Locs(i),1)));
hold on
end
xlabel('W.L.(nm)');
ylabel('Value');
if option == 1
save r1.mat data1 As Locs
end
if option == 2
save r2.mat data1 As Locs
end
%小波分解
NAME = 'haar';
figure;
subplot(611);
plot(A);
subplot(612);
plot(d5);
subplot(613);
plot(d4);
subplot(614);
plot(d3);
subplot(615);
plot(d2);
subplot(616);
plot(d1);
%提取变换变换后的特征数据
[y1,y2,y3,y4,y5,y6,y7,y8,y9,y10,y11,y12] = func_wavelet_feature(As,NAME);
24_007m4.本算法原理
基于小波变换和峰值搜索的光谱检测技术是信号处理领域的一项重要方法,尤其适用于分析含有丰富频率成分的非平稳信号,如光谱分析中的复杂信号检测。该技术结合了小波变换的强大时频分析能力与峰值检测算法的敏锐性,能够在保持时间分辨率的同时,有效提取光谱数据中的关键特征,如吸收峰、发射峰等。
小波变换是一种时频分析工具,相比传统的傅里叶变换,它在时域和频域都提供了更高的分辨率。小波基函数是一系列具有有限支撑、良好的局部化特性和一定的衰减性质的函数。小波变换的基本形式可以表示为:

光谱信号通常包含多个频率成分,且这些成分可能随时间变化。应用小波变换分析光谱信号,首先需要选择合适的小波基函数,以匹配信号的特性。常见的选择包括Morlet小波、Daubechies小波等,依据信号的特性(如光滑度、尖锐度)进行选取。
对于光谱数据S(λ),小波变换后得到的一维小波系数序列可以表达为:

峰值检测是识别光谱中显著特征点(如吸收峰、发射峰)的关键步骤。在小波域中,峰值通常对应于信号中的特殊事件或变化点。检测过程通常包括以下几个步骤:
-
阈值确定:设定一个合适的阈值来区分信号和噪声。这可以通过多种方式实现,如固定阈值法、自适应阈值法(如基于噪声水平估计的固定因子乘积)、或是基于统计分布的方法。
-
峰值定位:在超过阈值的小波系数中,寻找局部最大值点。这一步骤可以通过比较邻近系数的大小来完成,具体算法有简单的局部极大值搜索或更复杂的轮廓跟踪算法。
-
峰值筛选:由于噪声或其他因素可能导致假峰的出现,对初步识别的峰值进行进一步筛选至关重要。常用策略包括基于形状、强度或位置的准则来排除非真实峰。
5.完整程序
VVV
















 4870
4870

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











