






 本文详细解释了原点复归模式的自动执行、接点触发两种类型,以及原点检测器种类、寻找方向、短距离移动方式和停止模式的设定。适合了解伺服系统控制技术的工程师阅读。
本文详细解释了原点复归模式的自动执行、接点触发两种类型,以及原点检测器种类、寻找方向、短距离移动方式和停止模式的设定。适合了解伺服系统控制技术的工程师阅读。
原点复归功能相关设定参数
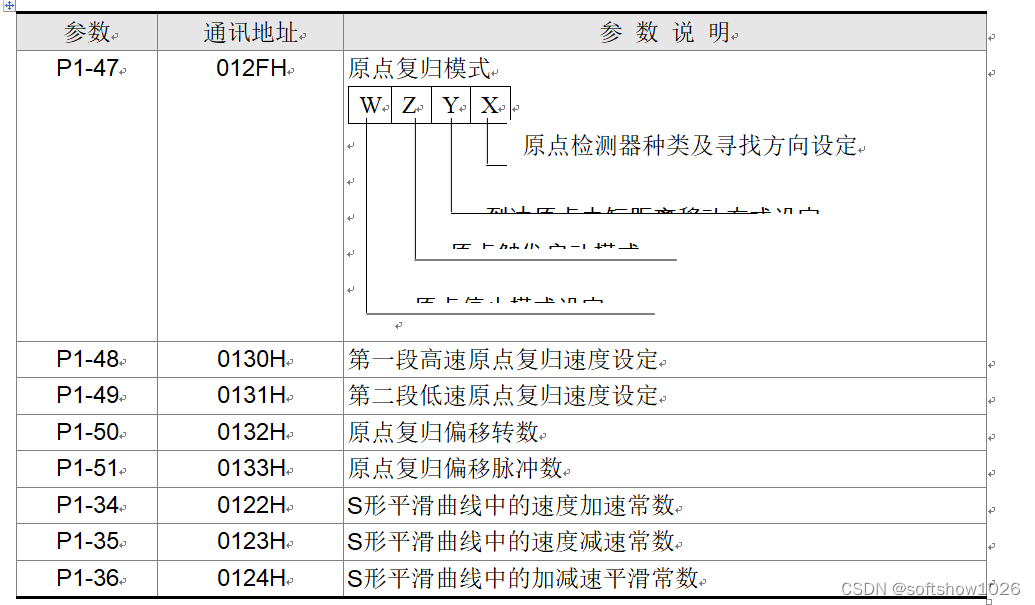
原点复归模式说明
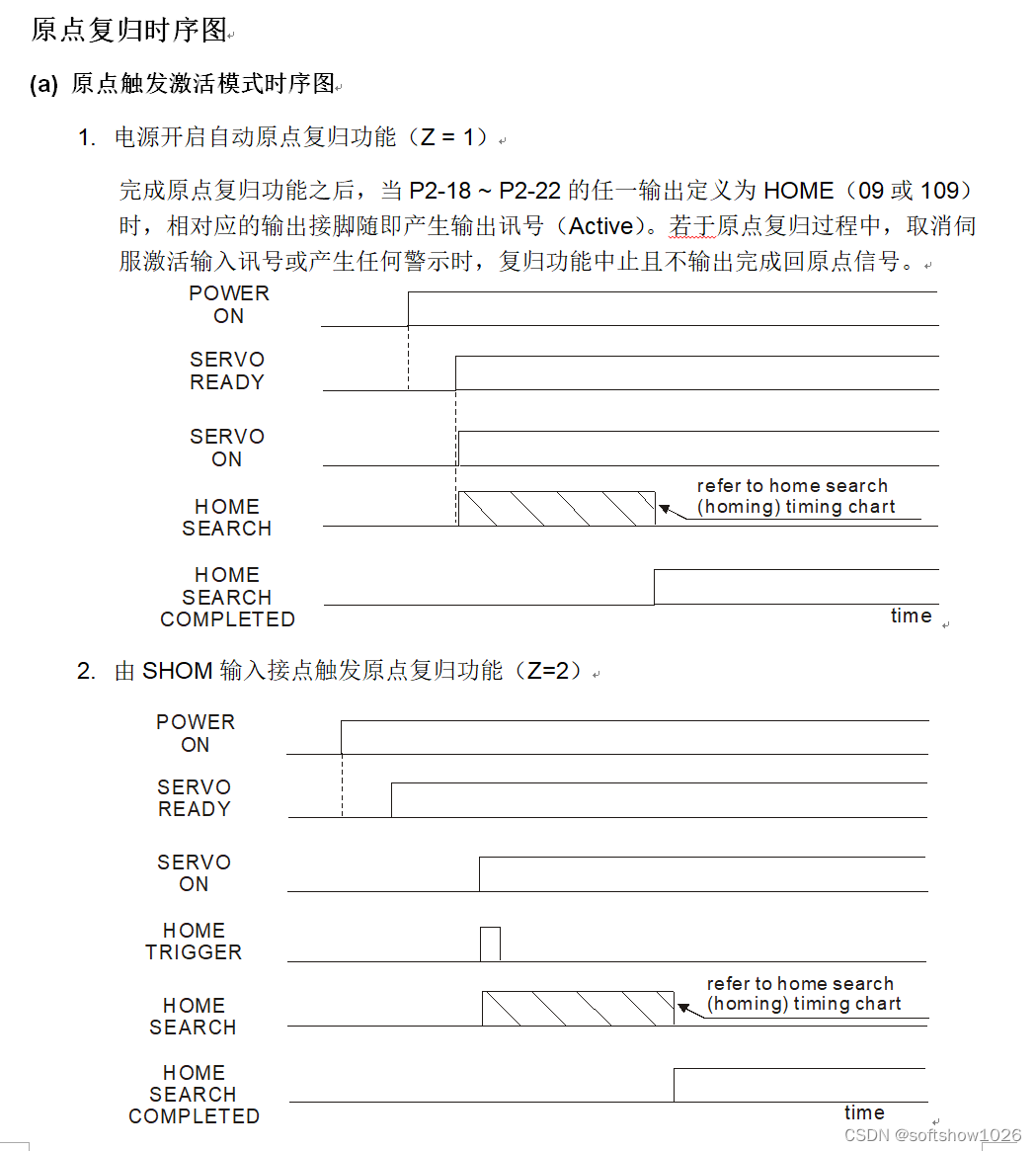
A. 原点触发激活模式
原点触发激活模式分为自动执行原点复归功能及接点触发原点复归功能两大类:
Z=0:关闭原点复归功能
当Z设为0时不论其它设定值为何,原点复归功能无法激活。
Z=1:电源开启时自动执行原点复归功能
此功能仅用于电源及伺服激活投入时一次有效,亦即于伺服运转中不须重复执行复归原点的工作条件下使用。使用此功能可以省略一个用来执行复归原点的输入接点。
Z=2:由SHOM输入接点触发原点复归功能
设定此功能时,必须将输入接脚功能规划缓存器(P2-10~P2-17)中的任一缓存器,设定成SHOM触发原点输入功能(a接点:127, b接点:27)。在伺服运转中可随时触发SHOM接点,并执行原点复归功能。
B. 原点检测器种类及寻找方向设定
原点检测器可使用左极限或右极限开关作为原点参考点,亦可使用额外的检测器(如近接型或光闸型开关)作为原点参考点。当伺服马达仅在一回转内运动时,亦可设定Z脉冲为原点参考点。
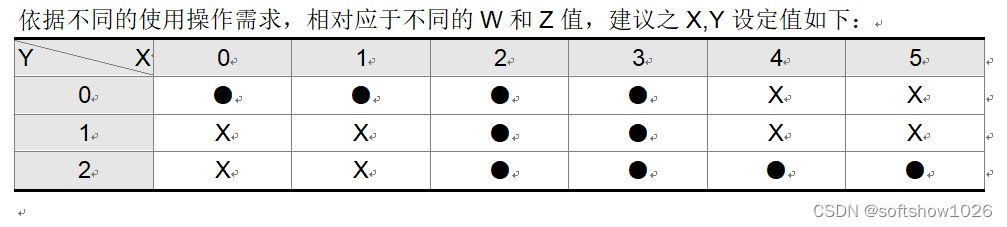
X=0:正转方向寻找原点,并且以CCWL极限输入点作为原点的粗略参考点。当完成原点定位后,CCWL则转为极限输入功能。其后的再触发将产生极限警示,使用极限输入点作为原点的粗略参考点时,建议设定返回寻找Z脉冲(Y=0)做为精确的机械原点。
X=1:反转方向寻找原点,并且以CWL极限输入点作为原点的粗略参考点。当完成原点定位后,CWL则转为极限输入功能。其后的再触发将产生极限警示,使用极限输入点作为原点的粗略参考点时,建议设定返回寻找Z脉冲(Y=0)做为精确的机械原点。
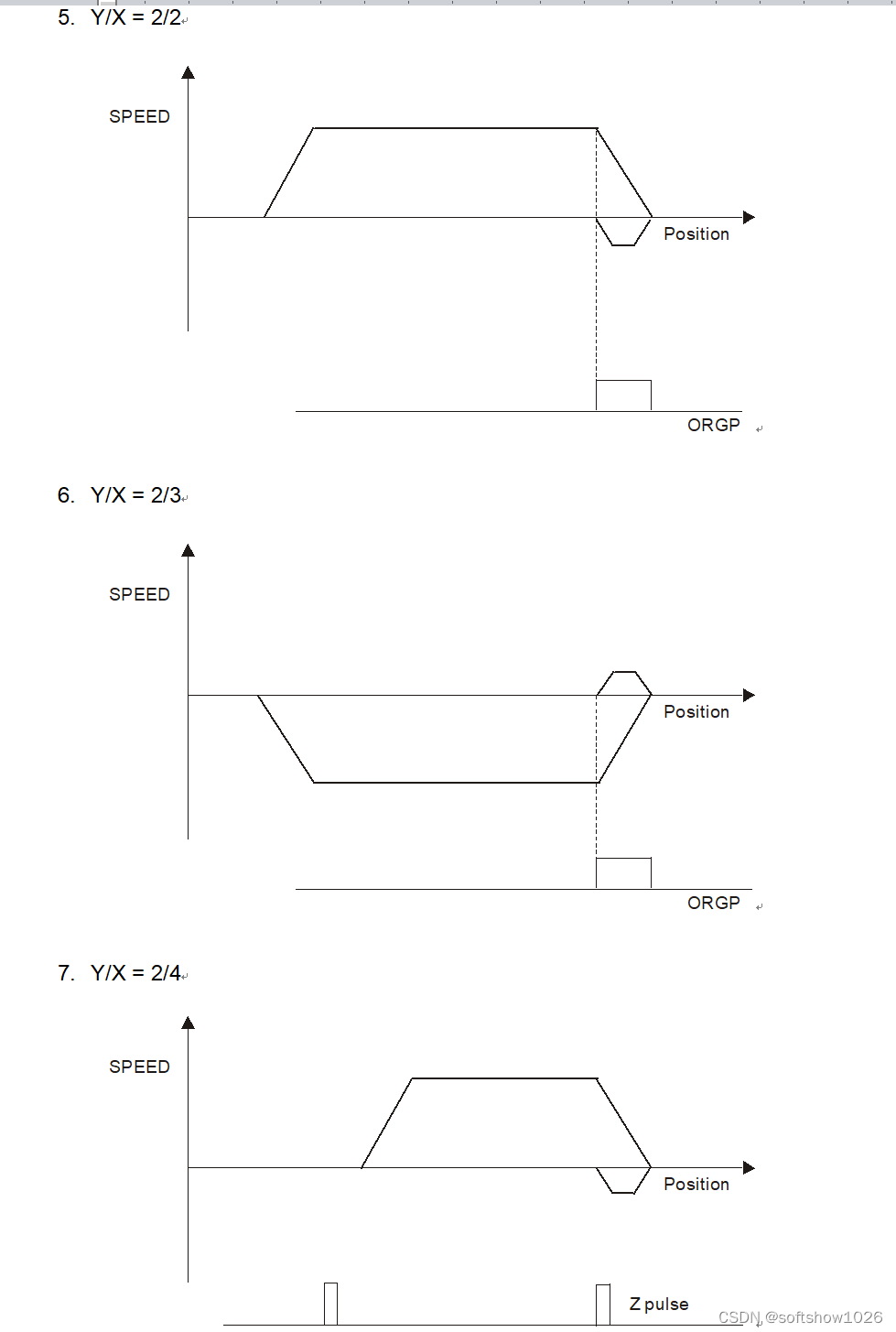
X=2:正转方向寻找原点,并以ORGP(外部检测器输入点)作为原点的参考点,此时精确的机械原点可设为返回寻找(Y=0)或不返回寻找(Y=1)的Z相脉冲。当不使用Z相脉冲做为机械原点时,亦可设定ORGP的正缘为机械原点(Y=2)。
X=3:反转方向寻找原点,并以ORGP(外部检测器输入点)作为原点的参考点。此时精确的机械原点可设为返回寻找(Y=0)或不返回寻找(Y=1)的Z相脉冲。当不使用Z相脉冲做为机械原点时,亦可设定ORGP的正缘为机械原点(Y=2)。
X=4:正转方向直接寻找Z相脉冲原点,此功能通常用于伺服马达仅在一回转范围的运动控制,此时可不外接任何检测开关(1.01版)。
X=5:反转方向直接寻找Z相脉冲原点,此功能通常用于伺服马达仅在一回转范围的运动控制,此时可不外接任何检测开关(1.01版)。
C. 到达原点之短距离移动方式设定
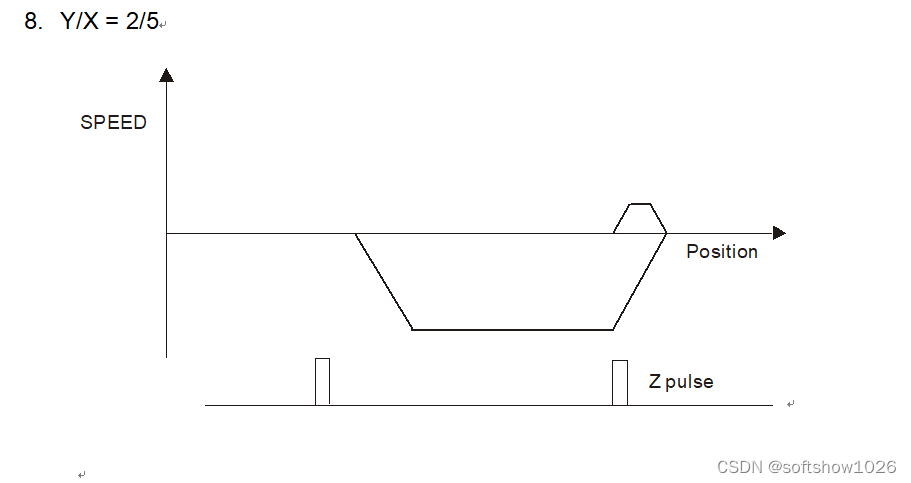
Y=0:找到参考原点之后马达折返以第二段速寻找就近的Z相脉冲做为机械原点。
Y=1:找到参考原点之后马达转为第二段速继续向前寻找就近的Z相脉冲做为机械原点。
Y=2:找寻到检测器ORGP的上缘做为机械原点并依减速停止,适用于X值为2及3的设定;或找寻到Z脉冲时并依减速停止,适用于X值为4及5的设定。
并以侦测到用于检测器原点检测时X值仅适用于2及3的设定.。Z脉冲原点检测时X值仅适用于4的设定或Z脉冲时。
D. 原点停止模式设定
W=0:原点检测完成后,马达减速并拉回至原点。
于第二段速运转中取得原点检测信号后,马达减速停止。停止后再以二段速移动到机械原点位置。
W=1:原点检测完成后,马达依前进方向减速停止。
于第二段速运转中取得原点检测信号后,马达减速停止。停止后的位置超越量不再修正,此时机械原点位置并不会因位置超越量的不同而改变。





















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











