







一个故事:
面试官:有没有看过HashMap 的源码?
面试者:没有
面试官:那让你来实现HashMap你会怎么做?
面试者:Map主要用来缓存一些键值对,所以读取或者写入操作比较多。当即想到用肯定会有数组的结构可以很快的查询。一个一个实体,用数组存储。
面试官:除了用遍历的方式,来Get和Put操作时候,怎么确保你当前的key存在还是不存在呢
面试者:。。。
能力有限,只限于讲讲自己对HashMap的认识,有不对的之处,敬请指出
基本概念
Map集合即Key-Value的集合,前面加个Hash,即散列,无序的。所以HashMap即散着的,无序的Key-Value集合.我们来看看Map的Node的结构
static class Node<K,V> implements Map.Entry<K,V> {
final int hash;//用来做索引,待会会主要介绍这个变量
final K key;//map对应的key
V value;//map对应的value
Node<K,V> next; //map的下一个节点接下来,我们进行Map的基本操作的介绍。首先简单灌输一个概念,是关于HashMap的数据结构。然后我们去代码里面求证。
HashMap的基本数据结构是数组加链表的。就是这种结构
借鉴一张图,侵权请告知
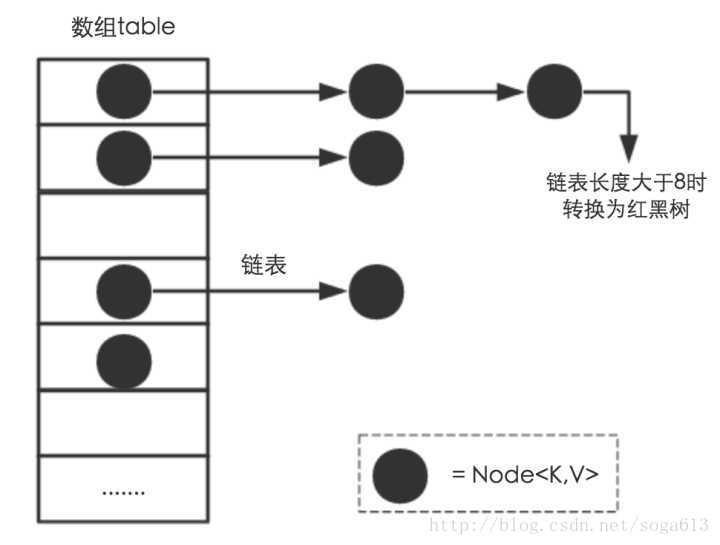
至于这个怎么塞进数组指定位置,什么时候用链表,什么时候转成红黑树。我们在操作map的时候来说。现在记住他是这种结构就好了
初始化
我们来直接看需要参数最多的这个构造方法
/**
* Constructs an empty {@code HashMap} with the specified initial
* capacity and load factor.
*
* @param initialCapacity 初始化容量
* @param loadFactor 负载因子
* @throws IllegalArgumentException 初始化容量或者负载因子为负数的时候,抛出参数异常
*/
public HashMap(int initialCapacity, float loadFactor) {
if (initialCapacity < 0)
throw new IllegalArgumentException("Illegal initial capacity: " + initialCapacity);
if (initialCapacity > MAXIMUM_CAPACITY)
initialCapacity = MAXIMUM_CAPACITY;
if (loadFactor <= 0 || Float.isNaN(loadFactor))
throw new IllegalArgumentException("Illegal load factor: " +
loadFactor);
this.loadFactor = loadFactor;
this.threshold = tableSizeFor(initialCapacity);
}我们在这里看到了threshold即map的最大容量,并不是我们直接传进来的容量。我们来看看这里做了什么
/**
* Returns a power of two size for the given target capacity.
*/
static final int tableSizeFor(int cap) {
int n = cap - 1;
n |= n >>> 1;
n |= n >>> 2;
n |= n >>> 4;
n |= n >>> 8;
n |= n >>> 16;
return (n < 0) ? 1 : (n >= MAXIMUM_CAPACITY) ? MAXIMUM_CAPACITY : n + 1;
}我相信大部分直接接触java的同学来说这个方法第一眼看上去是懵逼的。看一下这篇文章理解一下Java位运算相关操作。其作用就是找到比传进来那个数的大的,2的n次方。这个地方为什么要这么设计?那个负载因子又有什么用,让我们带着疑问继续向下看。
put操作
借鉴一张图,侵权请告知
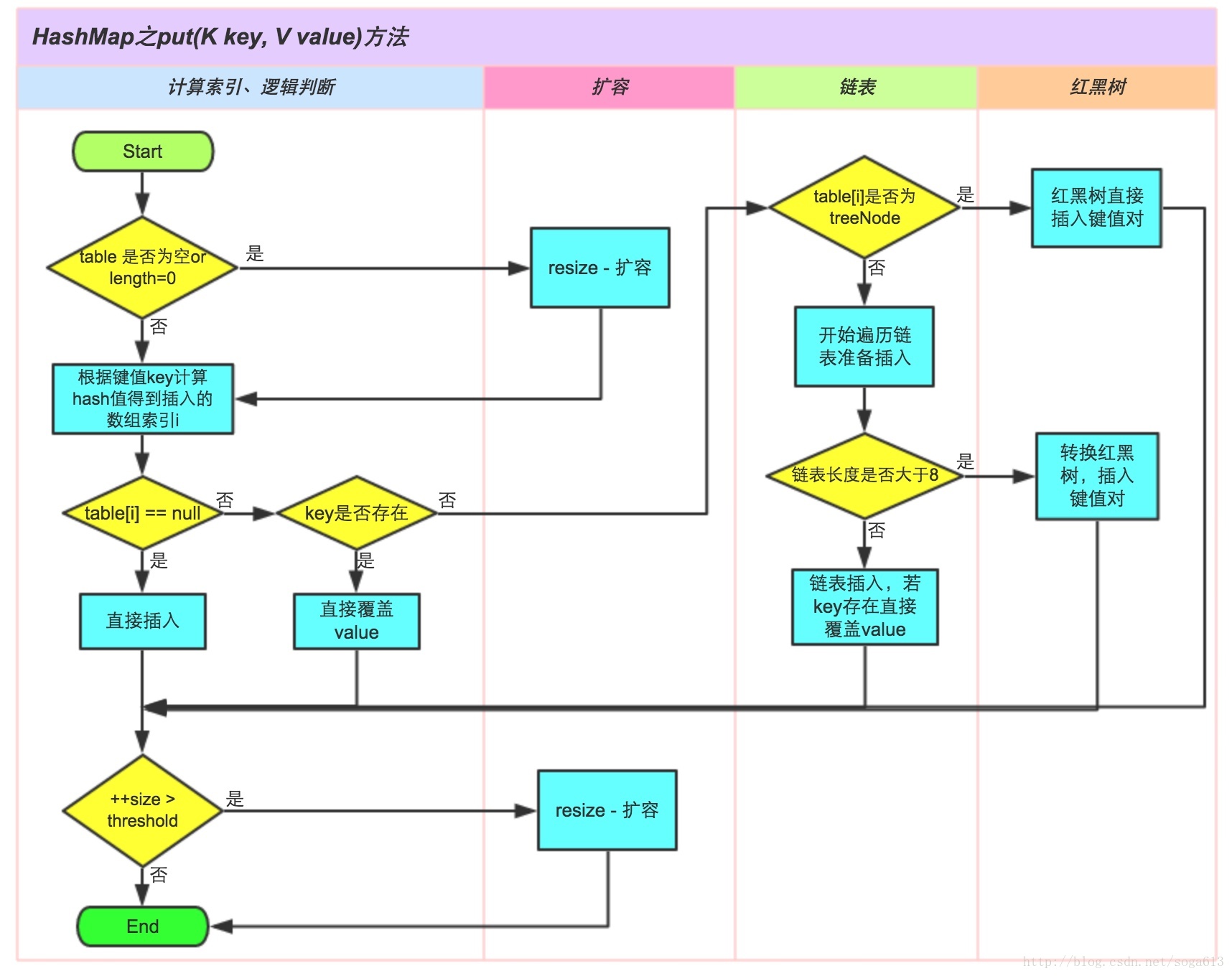
理解一下大概流程,我们接下来看代码:
/**
* 计算key的hash值
*/
static final int hash(Object key) {
int h;
return (key == null) ? 0 : (h = key.hashCode()) ^ (h >>> 16);
}
/**
* 插入key-value
*/
public V put(K key, V value) {
return putVal(hash(key), key, value, false, true);
}
/**
* 实现put操作
*
* @param key的hash值
* @param key值
* @param value值
* @param onlyIfAbsent if true, don't change existing value
* @param evict if false, the table is in creation mode.
* @return 之前的value
*/
final V putVal(int hash, K key, V value, boolean onlyIfAbsent,
boolean evict) {
Node<K,V>[] tab; Node<K,V> p; int n, i;
//1. 如果当前table为空,新建默认大小的table
if ((tab = table) == null || (n = tab.length) == 0)
n = (tab = resize()).length;
//2. 获取当前key对应的节点
if ((p = tab[i = (n - 1) & hash]) == null)
//3. 如果不存在,新建节点
tab[i] = newNode(hash, key, value, null);
else {
//4. 存在节点
Node<K,V> e; K k;
//5. key的hash相同,key的引用相同或者key equals,则覆盖
if (p.hash == hash &&
((k = p.key) == key || (key != null && key.equals(k))))
e = p;
//6. 如果当前节点是一个红黑树树节点,则添加树节点
else if (p instanceof TreeNode)
e = ((TreeNode<K,V>)p).putTreeVal(this, tab, hash, key, value);
//7. 不是红黑树节点,也不是相同节点,则表示为链表结构
else {
for (int binCount = 0; ; ++binCount) {
//8. 找到最后那个节点
if ((e = p.next) == null) {
p.next = newNode(hash, key, value, null);
//9. 如果链表长度超过8转成红黑树
if (binCount >= TREEIFY_THRESHOLD - 1) // -1 for 1st
treeifyBin(tab, hash);
break;
}
//10.如果链表中有相同的节点,则覆盖
if (e.hash == hash &&
((k = e.key) == key || (key != null && key.equals(k))))
break;
p = e;
}
}
if (e != null) { // existing mapping for key
V oldValue = e.value;
//是否替换掉value值
if (!onlyIfAbsent || oldValue == null)
e.value = value;
afterNodeAccess(e);
return oldValue;
}
}
//记录修改次数
++modCount;
//是否超过容量,超过需要扩容
if (++size > threshold)
resize();
afterNodeInsertion(evict);
return null;
}我们来分析关键的一步,2. 获取当前key对应的节点 (p = tab[i = (n - 1) & hash]) == null 当中的这一句tab[i = (n - 1) & hash 我们可以知道这个tab其实就是Map中实体数组。然后我们通过计算下标 i = (n-1) & hash来获取对应节点。n是当前tab的的长度,hash是将key通过hash()方法获取的。所以我们获取到这个节点的下标就是经过了以下几步:
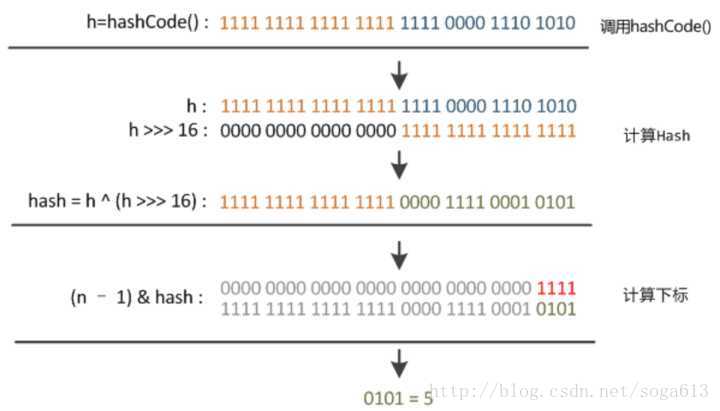
1. 计算出key的hashCode,记为h
2. h与h右移16位进行异或运算,记为hash
3. hash与当前tab的length-1 进行与运算。得出下标
通过hashCode的高16位异或低16位,优化高位运算的算法。这么做可以在数组table的length比较小的时候,也能保证高低位参与到hash计算中,又不会有很大的消耗。接着,用到了table的length和hash进行与运算。前面一定保证table的length是2的n次方。当length总是2的n次方时,h& (length-1)运算等价于对length取模,也就是h%length,但是&比%具有更高的效率。所以这是hashmap对取模的优化。
这也就解释了Node中hash的值怎么来的,以及它的作用。putVal的流程也就解释了怎么塞进数组指定位置,什么时候用链表,什么时候转成红黑树,这些问题。
盗图一张,嘻嘻嘻
hashmap获取index的运算过程图:
当我们明白这个put操作是怎么获取index的时候,get方法也就如出一辙了。看一看就明白了。
Resize扩容机制
我可以从putVal()中看到这两段代码
...
if ((tab = table) == null || (n = tab.length) == 0)
n = (tab = resize()).length;
...
if (++size > threshold)
resize();
...即当前的map是空的时候,或者map的size超过threshold的时候,就会调用resize方法。我们来撸源码:
/**
* 初始化table的size或者将table的size翻倍。
* @return the table
*/
final Node<K,V>[] resize() {
Node<K,V>[] oldTab = table;
int oldCap = (oldTab == null) ? 0 : oldTab.length;//之前的容量
int oldThr = threshold;//之前的瓶颈
int newCap, newThr = 0;//新的容量,新的瓶颈
//当前长度大于零
if (oldCap > 0) {
//当前长度超过hashMap定义的最大容量,瓶颈设置为Int的最大值
if (oldCap >= MAXIMUM_CAPACITY) {
threshold = Integer.MAX_VALUE;
return oldTab;
}
//当前长度翻倍后,小于hashMap定义的最大容量并且大于默认初始化容量
else if ((newCap = oldCap << 1) < MAXIMUM_CAPACITY &&
oldCap >= DEFAULT_INITIAL_CAPACITY)
newThr = oldThr << 1;//容量翻倍
}
//初始化的时候给了默认容量
else if (oldThr > 0)
newCap = oldThr;
//设置默认大小,初始化HashMap即走空构造的时候
else {
newCap = DEFAULT_INITIAL_CAPACITY;
newThr = (int)(DEFAULT_LOAD_FACTOR * DEFAULT_INITIAL_CAPACITY);
}
//设置了默认容量的话,我们需要根据loadFactor设置扩容阈值
if (newThr == 0) {
float ft = (float)newCap * loadFactor;
newThr = (newCap < MAXIMUM_CAPACITY && ft < (float)MAXIMUM_CAPACITY ?
(int)ft : Integer.MAX_VALUE);
}
threshold = newThr;
@SuppressWarnings({"rawtypes","unchecked"})
Node<K,V>[] newTab = (Node<K,V>[])new Node[newCap];
table = newTab;
//重新塞入对应的数组的
if (oldTab != null) {
for (int j = 0; j < oldCap; ++j) {
Node<K,V> e;
if ((e = oldTab[j]) != null) {
oldTab[j] = null;
//如果链表只有一个,则直接赋值
if (e.next == null)
newTab[e.hash & (newCap - 1)] = e;
//如果是树节点,额外操作
else if (e instanceof TreeNode)
((TreeNode<K,V>)e).split(this, newTab, j, oldCap);
//链表结构
else { // preserve order
Node<K,V> loHead = null, loTail = null;
Node<K,V> hiHead = null, hiTail = null;
Node<K,V> next;
do {
next = e.next;
//判断是否还在当前的这个下标
if ((e.hash & oldCap) == 0) {
if (loTail == null)
loHead = e;//表头
else
loTail.next = e;
loTail = e;
}
else {
if (hiTail == null)
hiHead = e;//表头
else
hiTail.next = e;
hiTail = e;
}
} while ((e = next) != null);
//还在当前下标的链表
if (loTail != null) {
loTail.next = null;//释放
newTab[j] = loHead;
}
//加上之前容量的下标的链表
if (hiTail != null) {
hiTail.next = null;//释放
newTab[j + oldCap] = hiHead;
}
}
}
}
}
return newTab;
}前面那些逻辑判断中,主要是得出新的table的capacity和threshold。逻辑有点多,慢慢理一下。有一个关键的地方就是 扩容阈值 = table长度 * 负载因子的 这个地方为什么需要设置一个负载因子来算这个扩容阈值。这个涉及到空间以及时间效率的选择。我们可以很简单的想到,如果这个负载因子设置成很大即会提高扩容阈值,空间利用率就会高,但是可想而知就是hash碰撞会变多,导致时间效率就会变低。反之,则空间利用率就低,时间效率会高。
计算好table的capacity和threshold之后,需要转移数组内容。我们可以看到这里出现了其实最懵逼的应该是这个判断条件吧if ((e.hash & oldCap) == 0)。 e.hash&oldCap是什么鬼?我们先来看一个东西
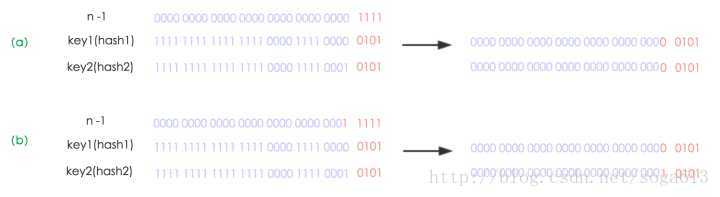
n-1: n表示当前tab的长度 ,key1(hash1): 表示key1的hash值,key2(hash2): 表示key2的hash值
对比的分析我们可以得出下面的

所以,我们在扩容HashMap的时候只需要判断新增那个bit位是0还是1,而e.hash&oldCap这个表达式就是计算出新增的那个bit 是0 还是1,就可以判断出这个节点的对应的数组的下标是原来的那个位置,还是原来的位置+oldCap了















 2875
2875











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









