







- 动态规划,简称DP
- 是求解最优化问题的一种常用策略
- 通常的使用套路(一步一步优化)
- 暴力递归(自顶向下,出现了重叠子问题)
- 记忆化搜索(自顶向下)
- 递推(自底向上)
动态规划的常规步骤
- 动态规划中的“动态”可以理解为是“会变化的状态”
- 定义状态(状态是原问题、子问题的解)
比如:定义dp(i)的含义 - 设置初始状态(边界)
比如设置dp(0)的值 - 确定状态转移方程
比如确定dp(i)和dp(i - 1)的关系
动态规划的一些相关概念
- 将复杂的原问题拆解成若干个简单的子问题
- 每个子问题仅仅解决1次,并保存它们的解
- 最后推导出原问题的解
- 可以用动态规划来解决的问题,通常具备2个特点
- 最优子结构(最优化原理):通过求解子问题的最优解,可以获得原问题的最优解
- 无后效性
某阶段的状态一旦确定,则此后过程的演变不再受此前各状态及决策的影响(未来与过去无关)
在推导后面阶段的状态时,只关心前面阶段的具体状态值,不关心这个状态是怎么一步步推导出来的
无后效性
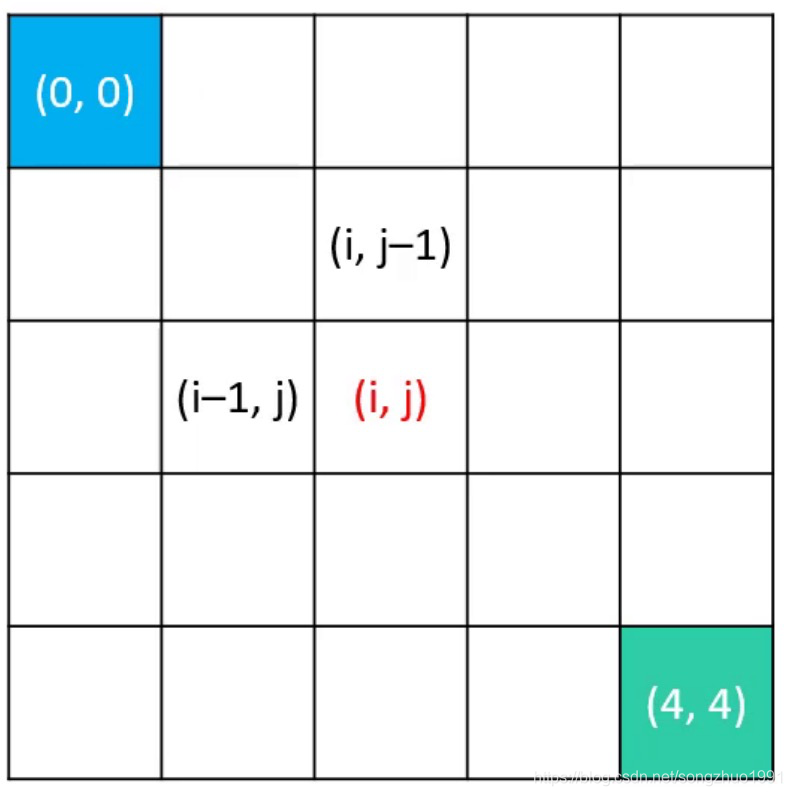
- 从起点(0, 0)走到终点(4, 4)一共有多少种走法?只能向右、向下走
- 假设dp(i, j)是从(0, 0)走到(i, j)的走法
dp(i, 0) = dp(0, j) = 1
dp(i, j) = dp(i, j - 1) + dp(i - 1, j) - 无后效性
推导dp(i, j)时只需要用到dp(i, j - 1)、dp(i - 1, j)的值
不需要关心dp(i, j - 1)、dp(i - 1, j)的值是怎么求来的
有后效性
- 如果可以向左、向右、向上、向下走,并且同一个格子不能走2次
- 有后效性
dp(i, j)下一步要这么走,还要关心上一步是怎么来的
也就是还要关心dp(i, j - 1)、dp(i - 1, j)是怎么来的?















 622
622











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









