










0. 注意:在成功安装ROS系统之前不要用anaconda安装Python,否则会造成Python路径不对,导致catkin库找不到,以至于安装失败。
以下安装流程为新安装deepin系统后裸机安装。
1. 准备
更换Deepin镜像源,首先备份/etc/apt/sources.list文件,之后修改该文件内容为:
## Generated by deepin-installer
deb [by-hash=force] https://mirrors.tuna.tsinghua.edu.cn/deepin panda main contrib non-free
#deb-src https://mirrors.tuna.tsinghua.edu.cn/deepin panda main contrib non-free
随后更新源
sudo apt-get update
并更新已安装的包
sudo apt-get dist-upgrade 或 sudo apt-get upgrade
注:这一步也可以通过deepin升级设置里选择清華或者阿里云实现
2. 安装dirmngr
sudo apt-get install dirmngr
sudo apt-get -f install
3. 设置环境变量
export ROS_OS_OVERRIDE=debian:stretch
(可以设置这个变量到.bashrc,方法如下: a)命令: gvim ~/.bashrc进入文件; b) 直接按i键对文件进行修改, esc + : + wq退出并保存修改之后的文件; c) 命令: source ~/.bashrc更新.bashrc)
4. Deepin15.5操作系统是debian stretch版本,设置sources.list
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu stretch main" > /etc/apt/sources.list.d/ros-latest.list'
设置成功如下图所示

5. 安装key
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
sudo apt-get update
6. 安装依赖并更新
sudo apt-get install python-rosdep python-rosinstall-generator python-wstool python-rosinstall build-essential
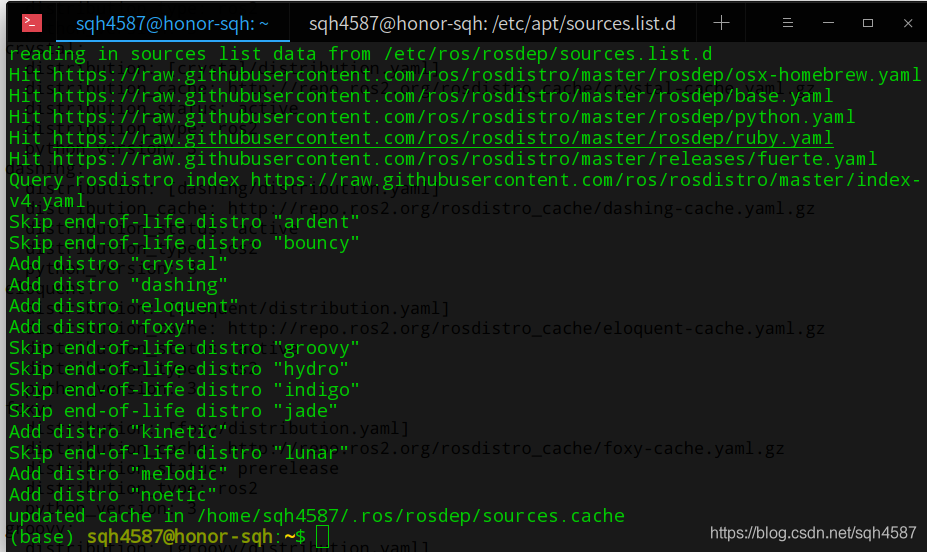
sudo rosdep init
rosdep update
成功如下图所示:
7. 下载代码并初始化
mkdir ~/ros_catkin_ws
cd ~/ros_catkin_ws
rosinstall_generator desktop_full --rosdistro melodic --deps --tar > melodic-desktop-full.rosinstall
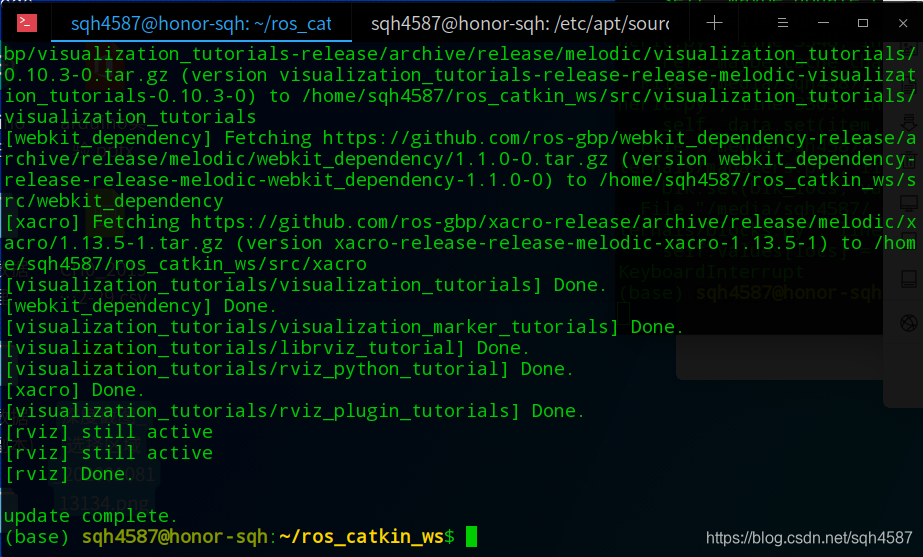
wstool init -j8 src melodic-desktop-full.rosinstall
如果wstool命令操作失败,删除~/ros_catkin_ws/src/文件夹,重复第三条指令,直到成功.编译成功如下图所示:
8. 安装源码的依赖
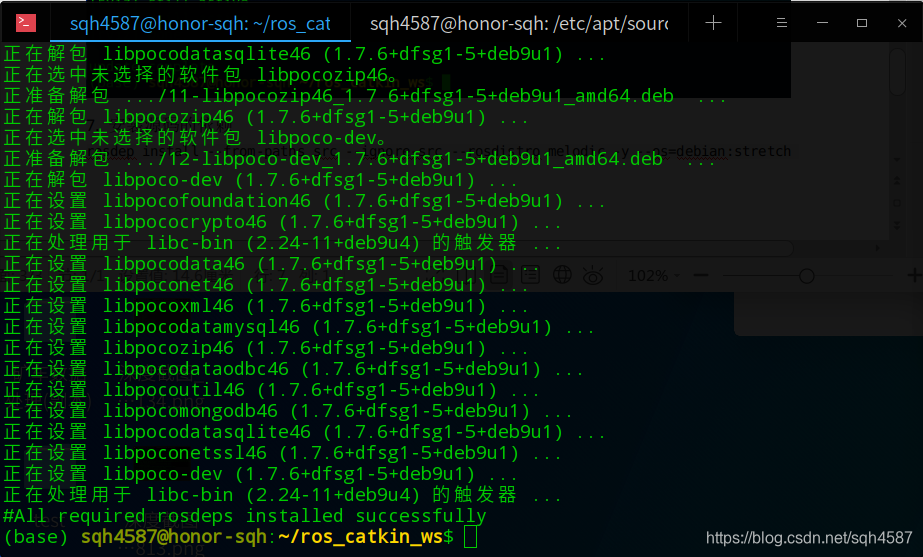
rosdep install --from-paths src --ignore-src --rosdistro melodic -y --os=debian:stretch
9. 编译
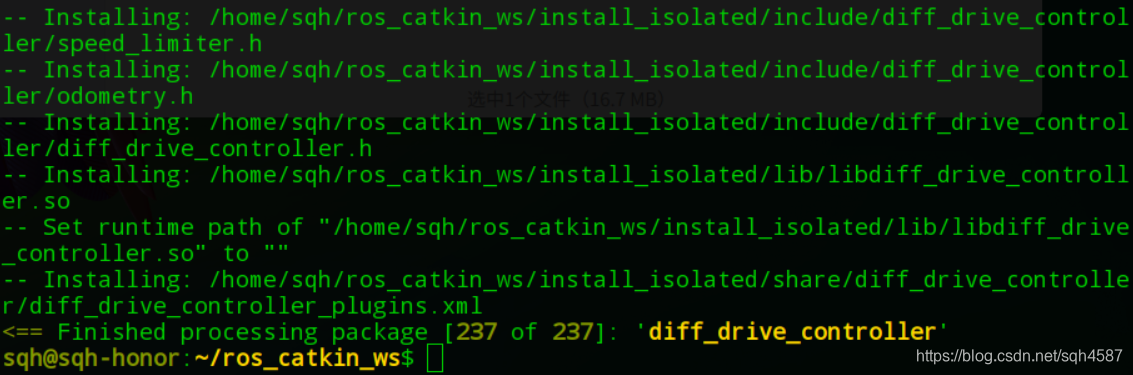
./src/catkin/bin/catkin_make_isolated --install -DCMAKE_BUILD_TYPE=Release
或者速度慢的
./src/catkin/bin/catkin_make_isolated --install -DCMAKE_BUILD_TYPE=Release -j1 -l1
NOTE:如果安装过程中出现下载table_scene_lms400.pcd文件而且速度很慢或下不下来,可以手动迅雷下载该文件(http://download.ros.org/data/pcl/table_scene_lms400.pcd)后放入/home/sqh/ros_catkin_ws/devel_isolated/pcl_ros/share/pcl_ros/samples/data/文件夹中(sqh换为自己的用户名)。
安装成功如下图所示:
10. 安装rosbash工具
sudo apt-get install rosbash
11. 添加环境变量
vim .bashrc
输入‘i’启动编辑,在文件最后添加source ~/ros_catkin_ws/install_isolated/setup.bash,依次输入‘esc’,‘:','wq'完成保存退出
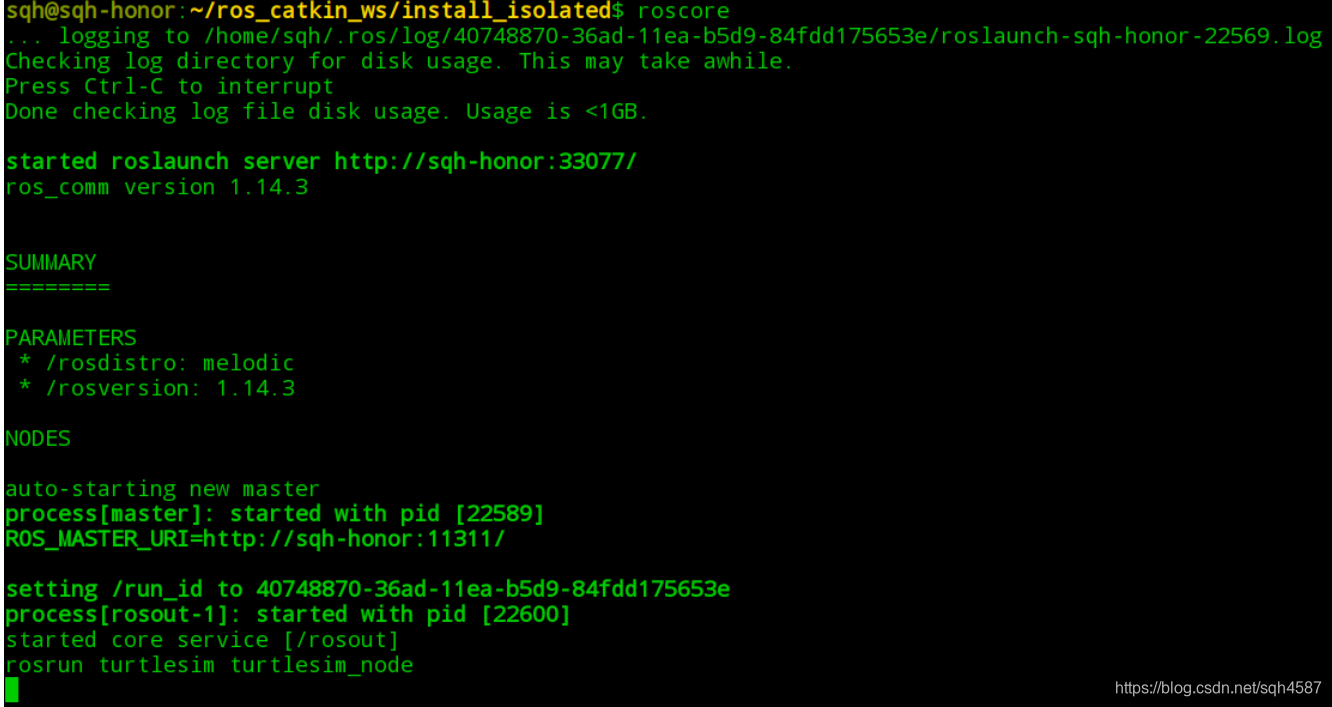
12. 打开三个终端,测试安装成功与否
第一个输入roscore,启动ros服务,成功如下图所示:
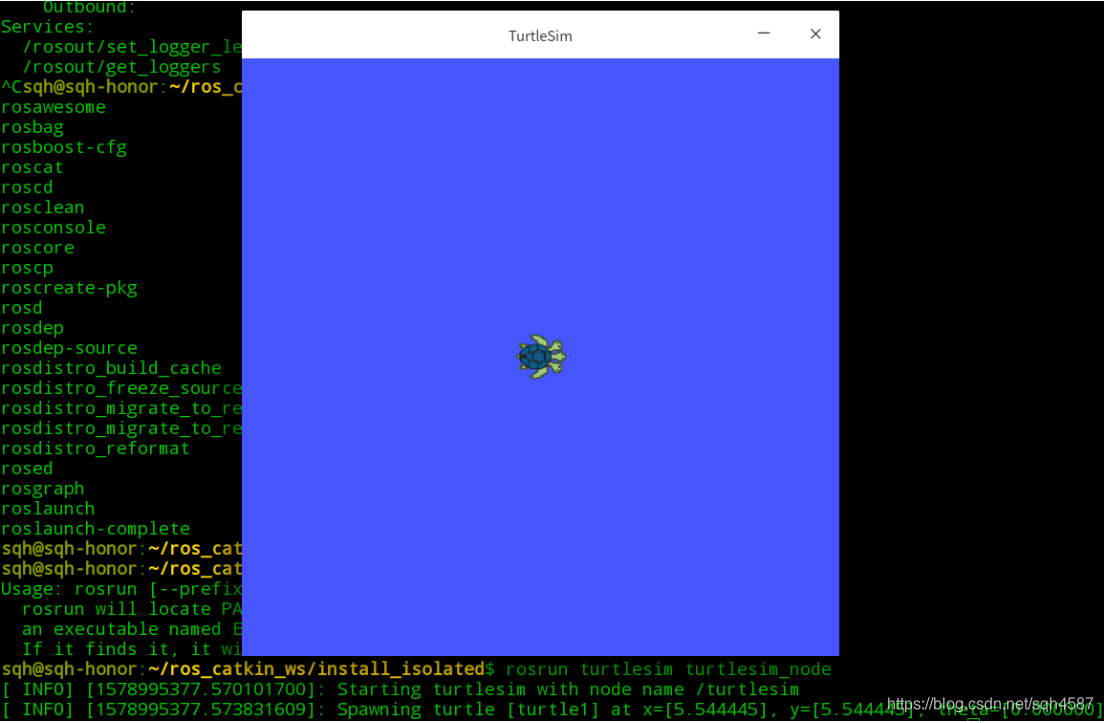
第二个输入rosrun turtlesim turtlesim_node,成功如下图所示:
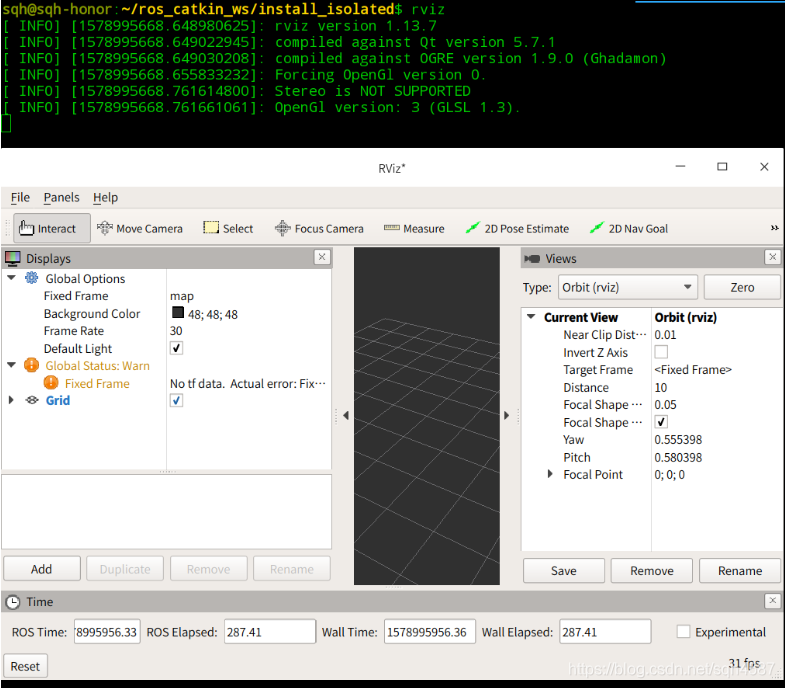
第三个输入rviz检测服务是否成功,成功如下图所示:
欢迎打赏!



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









