







 本文详细介绍使用HP-ProDesk480G2MT计算机及HP增霸卡进行网络同传的过程,包括母机取消保护、安装软件、设置保护等步骤,并提供同传的具体操作流程。
本文详细介绍使用HP-ProDesk480G2MT计算机及HP增霸卡进行网络同传的过程,包括母机取消保护、安装软件、设置保护等步骤,并提供同传的具体操作流程。
616HP电脑网络同传
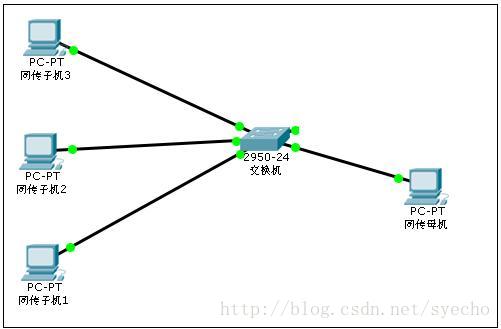
1、 线路图
2、 计算机
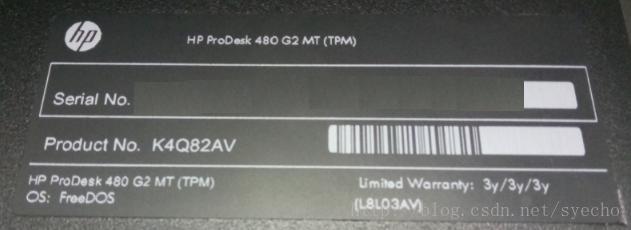
a) HP-ProDesk 480 G2 MT计算机(母机、子机)
b) HP增霸卡(软件版)V6.01(母机、子机)
c) Win7-64(母机)
d) IP地址:自动获取(母机)
e) 应用软件(母机):略
3、 母机软件安装1:(取消保护)
616HP电脑网络同传
1、 线路图
2、 计算机
a) HP-ProDesk 480 G2 MT计算机(母机、子机)
b) HP增霸卡(软件版)V6.01(母机、子机)
c) Win7-64(母机)
d) IP地址:自动获取(母机)
e) 应用软件(母机):略
3、 母机软件安装1:(取消保护)
 4397
4397

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























