









简述:
1、主芯片:GD32F205VET6
2、编译器:IAR V8.40.1
3、系统:FreeRTOS V9.0
第一步:准备最简工程与系统
1、准备一个GD32F205VET6最简单的IAR工程;
2、准备FreeRTOS V9.0 源码,下载链接;
第二步:拷贝源码
1、将FreeRTOS V9.0 源码全部拷贝到最简工程;

2、删除不必要的文件
删除“portable”文件夹中多余文件,留下“IAR”、"MemMang”
第三步:编译器IAR配置
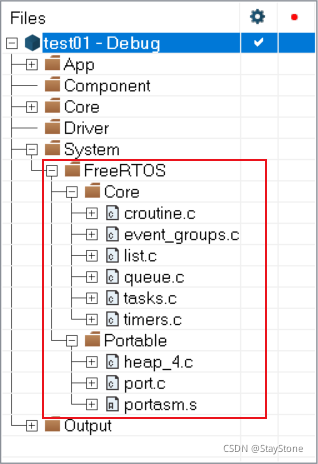
1、添加编译器工程目录和文件;
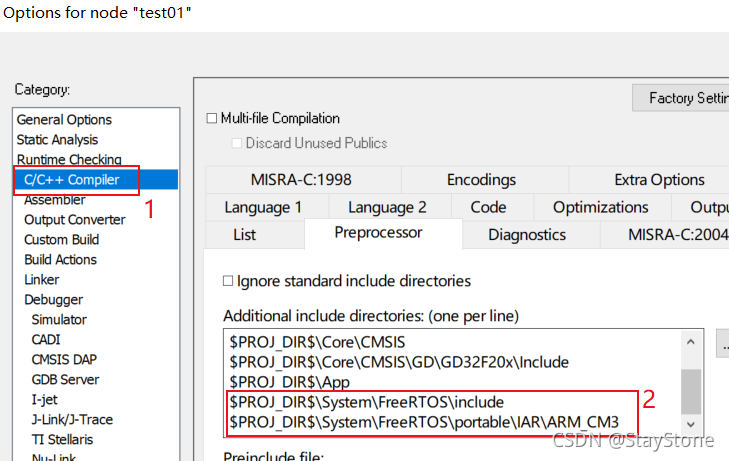
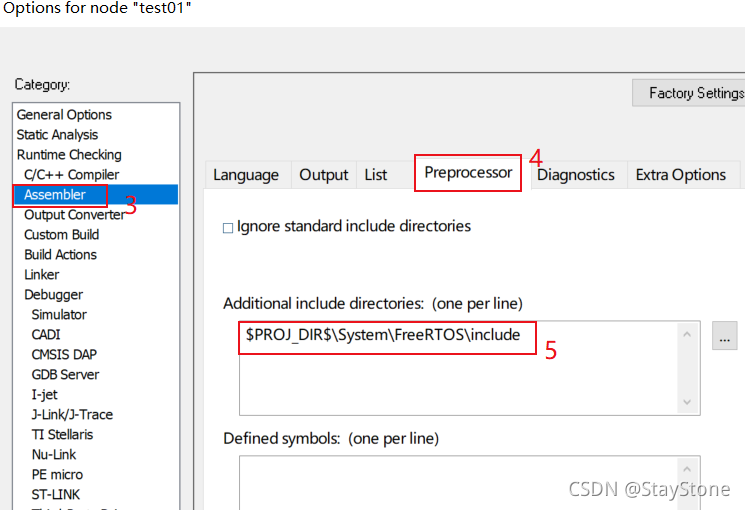
2、添加头文件路径
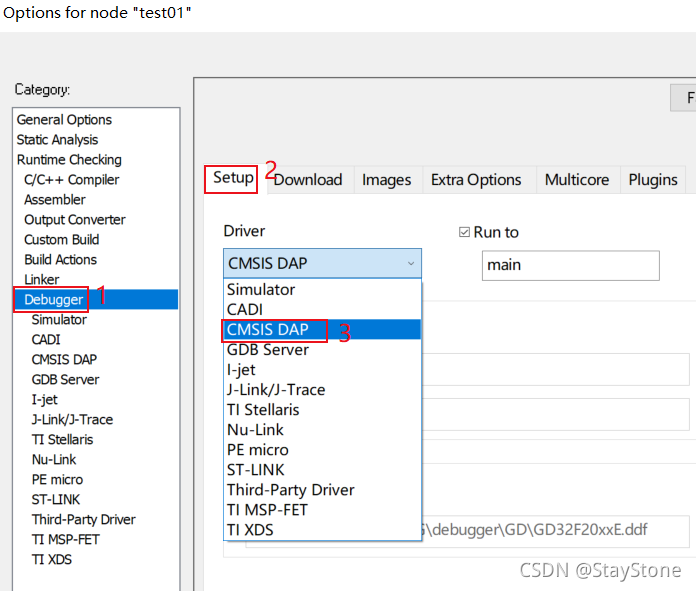
3、配置仿真器;
第四步:工程代码修改
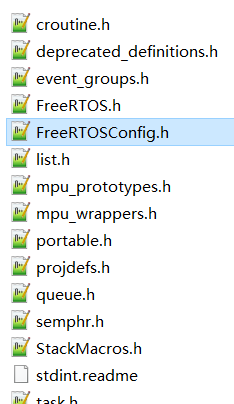
1、拷贝FreeRTOS系统源码中“Demo”中的“CORTEX_STM32F103_IAR”中的“FreeRTOSConfig.h”文件拷贝到自己的工程中的“FreeRTOS”文件中的“include”中;
2、添加系统宏定义
在“FreeRTOSConfig.h”文件添加系统宏定义
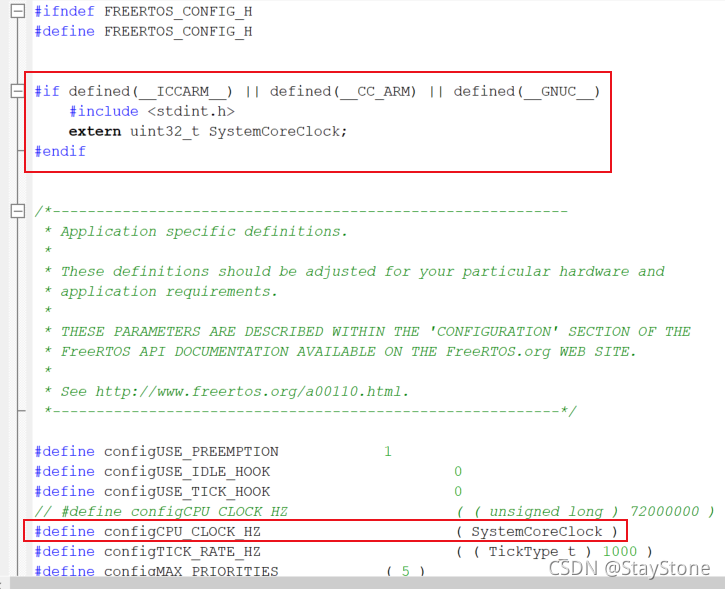
都知道大家喜欢源码,就把需要添加的贴出来吧:
#if defined(__ICCARM__) || defined(__CC_ARM) || defined(__GNUC__)
#include <stdint.h>
extern uint32_t SystemCoreClock;
#endif
#define configCPU_CLOCK_HZ ( SystemCoreClock )
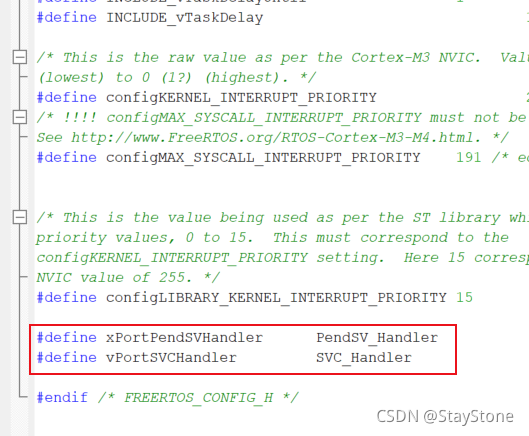
#define xPortPendSVHandler PendSV_Handler
#define vPortSVCHandler SVC_Handler
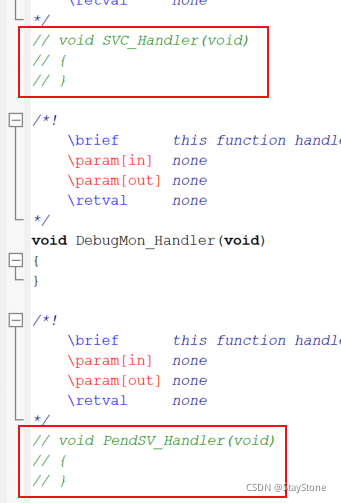
3、注释重复定义函数;
把“gd32f20x_it.c”文件中的“SVC_Handler”、“PendSV_Handler”函数注释掉
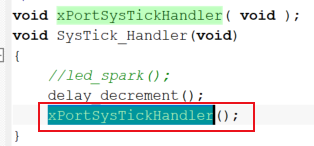
4、添加系统滴答时钟函数;
在“gd32f20x_it.c”文件中的“SysTick_Handler”函数中添加FreeRTOS系统滴答时钟函数“xPortSysTickHandler”
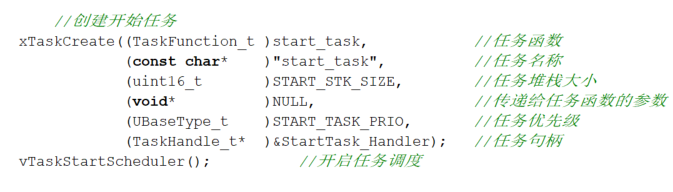
5、在main函数创建task
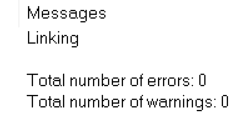
第五步:编译工程
1、编译工程并下载调试;
参考:
1、正点原子《STM32F1 FreeRTOS开发手册_V1.1.pdf》
2、网友总结

















 1318
1318

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









