







有些古董网站是包含了IE浏览器的ActiveX控件,如果不加载ActiveX控件就会导致部分页面不能显示,甚至检索功能都用不了。
点名某某大学的校内学位论文网站(我是一个没有感情的杀手
解决ActiveX控件不能使用,分三个步骤:
1.设置IE的安全配置。
单击菜单栏的“工具”->“Internet选项”->“安全”选项卡->“自定义级别”。
把“下载已签名的Activex控件”和“Activex控件和插件”选为启用。再确定。
2.重启计算机。配置才会生效。
3.先确定一下配置是不是改好了。然后登录需要ActiveX控件的网站。
如若还不能正常显示,则打开菜单栏的“工具”,在“Activex筛选”前打勾。
刷新页面。
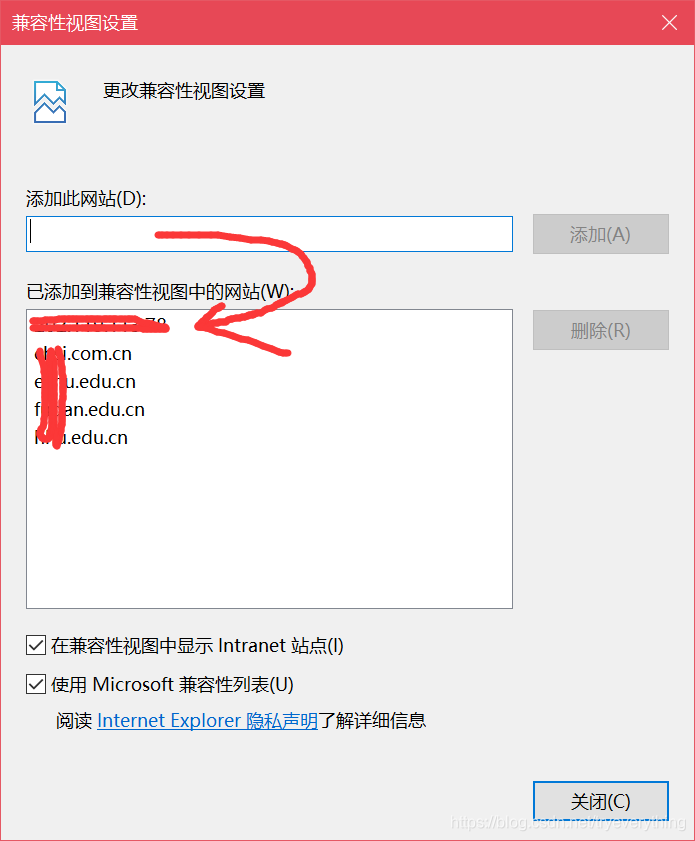
如若还不能正常显示,则打开菜单栏的“工具”,选择“兼容视图设置”,将该网站“添加”至兼容网站。刷新即可。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









