







 本文详细介绍了三角函数在不同角度下的定义,包括正角和负角,以及极角的概念。探讨了sine,cosine,tangent的图象特征和它们之间的关系,同时还涉及周期性、频率和相位角的概念,以及简谐函数的表达式和性质。后续章节可能讨论逆函数的内容。
本文详细介绍了三角函数在不同角度下的定义,包括正角和负角,以及极角的概念。探讨了sine,cosine,tangent的图象特征和它们之间的关系,同时还涉及周期性、频率和相位角的概念,以及简谐函数的表达式和性质。后续章节可能讨论逆函数的内容。
任意门
三角函数及其属性
我们假设你已经掌握初级三角学中,正锐角的sine,cosine和tangent定义(对比斜,邻比斜,对比邻)。
我们现在要把这个定义推广到大于 90 ° 90° 90°的角和负角上去。
提前说好,除非特殊标明,下文中所有角的度量都采用弧度制。
极角的定义
看下图:
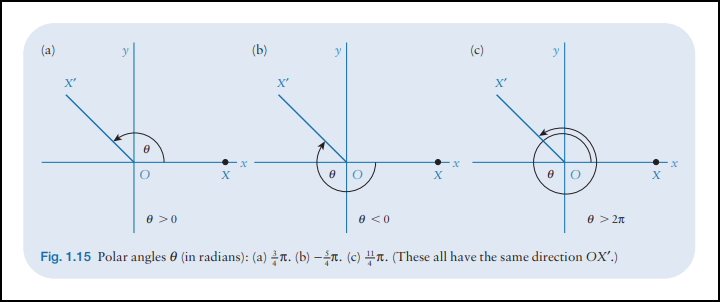
设 X X X是 x x x轴正方向上任一点。
如果我们取线段 O X OX OX,绕端点 O O O逆时针旋转,到达一个终末位置,记为线段 O X ′ OX' OX′,旋转过程中形成的角视为正。
如果顺时针旋转,则角视为负。
这些角在量值(不带单位和符号的数值)上是无限的。
我们把这种从x轴正方向开始测量的角叫做极角(polar angle)。
以 O X ′ OX' OX′为终末位置的角有无限个,它们之间的区别是量值相差整数个 2 π 2\pi 2π。
三角函数的定义
看图说话:
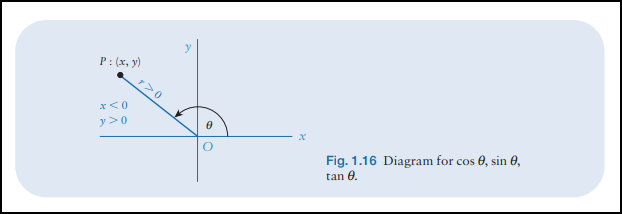
所有角的三角函数sine,cosine和tangent都按上图中标出的东西来定义: P : ( x , y ) P:(x,y) P:(x,y)是任一点, θ \theta θ是一个极角。
O P OP OP的长:
O P = r = x 2 + y 2 > 0 OP=r=\sqrt{x^2+y^2}>0 OP=r=x2+y2>0
万事俱备,我们终于可以给出任意角 θ \theta θ三角函数的定义:
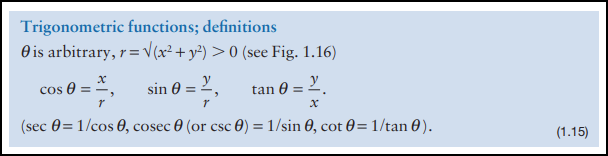
如果四个象限分开来看,上述定义都是初级三角学中sine,cosine和tangent定义的拓展(从 P P P点向 x x x轴作垂线,得直角三角形)。
r r r始终是正的,对应直角三角形里的斜边长。
但 x , y x,y x,y从三角形里对边,邻边长的正值,变成了坐标系里可正可负的带符号值。
进而决定了sine,cosine和tangent的正负。
- 第一象限: x > 0 , y > 0 x>0,y>0 x>0,y>0: 都 > 0 >0 >0
- 第二象限: x < 0 , y > 0 x<0,y>0 x<0,y>0: 只有 s i n θ > 0 sin\theta>0 sinθ>0
- 第三象限: x < 0 , y < 0 x<0,y<0 x<0,y<0: 只有 t a n θ > 0 tan\theta>0 tanθ>0
- 第四象限: x > 0 , y < 0 x>0,y<0 x>0,y<0: 只有 c o s θ > 0 cos\theta>0 cosθ>0
为了便于表示和计算,我们通常令 r = 1 r=1 r=1,这样可以直接得到不带 r r r 的函数值。
三角函数 sin θ , cos θ \sin\theta,\cos\theta sinθ,cosθ的图象
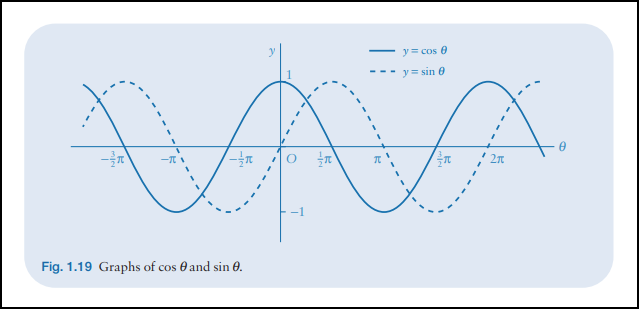
- s i n θ sin\theta sinθ和 c o s θ cos\theta
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









