






智能小车代码实测过,可以直接用
-
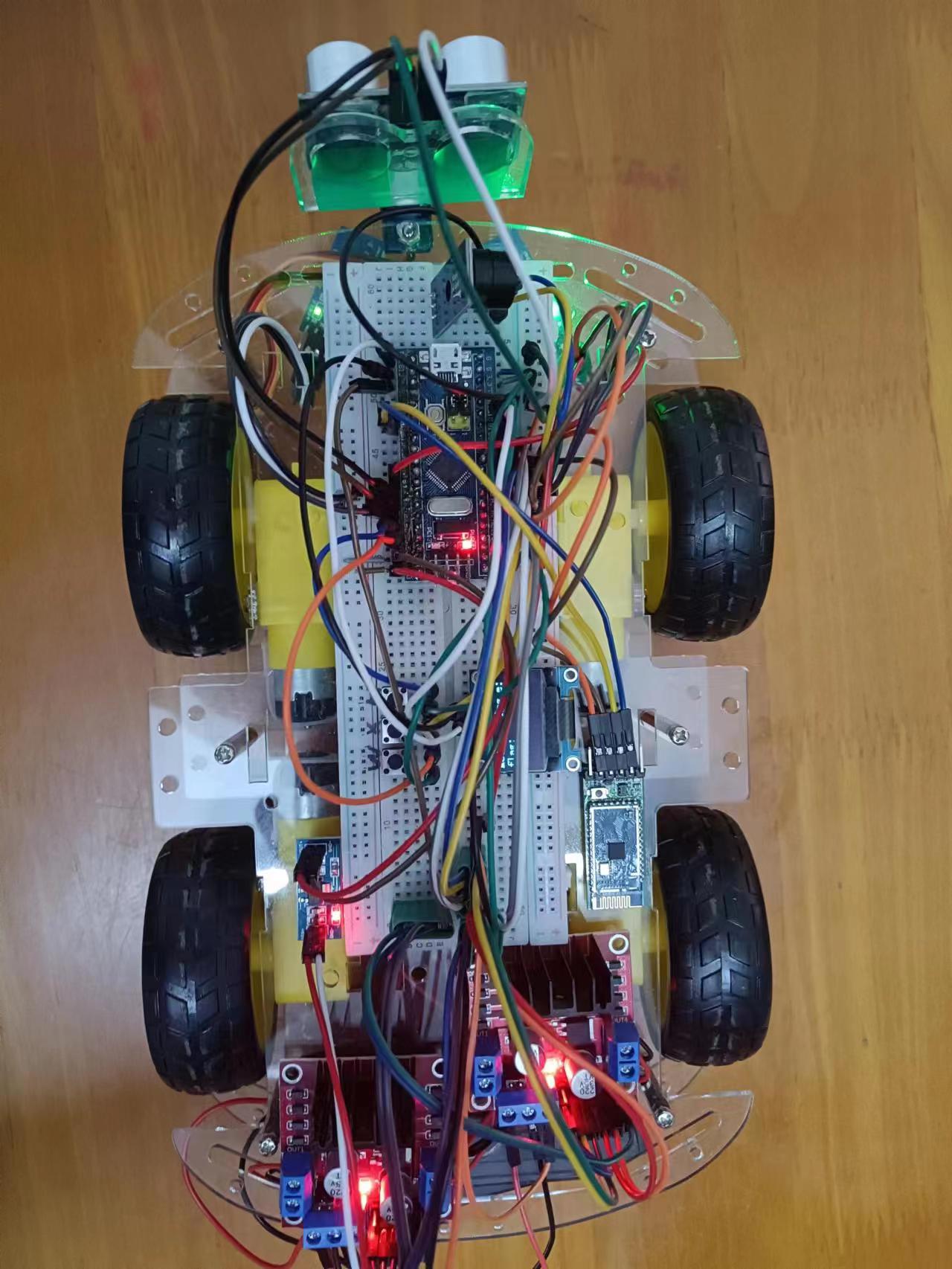
硬件部分:舵机用的是sg90,超声波模块用的是HC-SR04,蓝牙用的是HC-05,蜂鸣器模块,循迹模块,减压模块,电池用的是可充电的18650锂电池,电机用的是L298N,杜邦线*n,OLED模块四针0.96寸,面包板,st-link
-
软件部分:
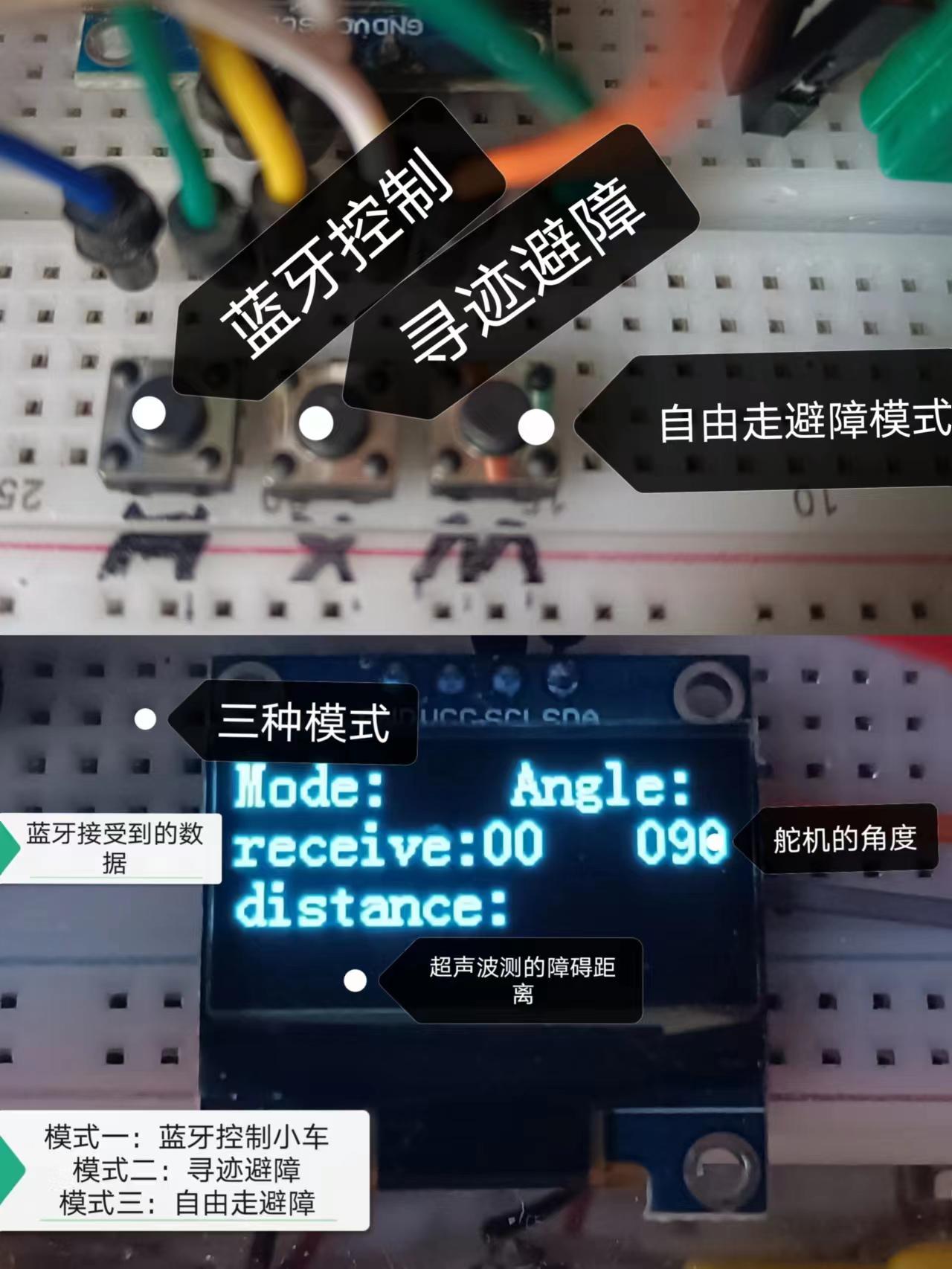
智能小车拥有三种模式,三种模式通过按键切换。(显示屏一直都可以显示各种数据)
模式一:小车可以自主的任意游走,且不会碰到障碍物,当达到危险距离的时候,蜂鸣器会发出警报,OLED显示障碍物距离
模式二 :小车循迹避障
模式三:蓝牙控制小车运动
-
下面是小车的图片(杜邦线飞线跳线多的要死)
-
下面是代码部分
主函数代码
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "PWM.h"
#include "motor.h"
#include "key.h"
#include "Timer.h"
#include "HCSR04.h"
#include "Servo.h"
#include "xunji.h"
#include "HC_05.h"
#include <stdio.h>
#ifdef __GNUC__
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif
uint8_t KeyNum;
uint8_t num3,num2,num1;
// RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
//
// GPIO_InitTypeDef GPIO_InitStructure;
// GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
// GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
// GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
// GPIO_Init(GPIOA, &GPIO_InitStructure);
//GPIO_ResetBits (GPIOA ,GPIO_Pin_0);
float Angle = 90;
uint64_t numlen(uint64_t num)
{
uint64_t len = 1;
for(; num > 9; ++len)
num /= 10;
return len;
}
//ÖжϷþÎñº¯Êý
u8 i;
u8 flag; //¶¨ÒåÒ»¸ö±ê־λ
void USART1_IRQHandler(void)
{
if(USART_GetITStatus(USART1, USART_IT_RXNE) == SET) //¼ì²éÖ¸¶¨µÄ USART1 ÖжϷ¢ÉúÓë·ñ
{
USART_ClearITPendingBit(USART1, USART_IT_RXNE); //Çå³ý USART1 µÄÖжϴý´¦Àíλ
GPIO_ResetBits(GPIOC,GPIO_Pin_13); //ÉèÖÃLEDµÆ×÷ΪÖжϷ¢ÉúÓë·ñµÄָʾµÆ
i= USART_ReceiveData(USART1); //·µ»Ø USART1 ×î½ü½ÓÊÕµ½µÄÊý¾Ý
//ifÓï¾äµÄÄÚÈݲ¿·Ö¿ÉÒÔ±£Ö¤À¶ÑÀ½ÓÊÕµ½µÄflagÊý¾ÝÊÇÕýÈ·µÄ£¬Èç¹û²»¼ÓµÄ»°»áµ¼Ö½ÓÊÕ²»µ½ÕýÈ·µÄÊý¾Ý
if(i=='0')
{
flag=0;
}
if(i=='1')
{
flag=1;
}
if(i=='2')
{
flag=2;
}
if(i=='3')
{
flag=3;
}
if(i=='4')
{
flag=4;
}
if(i=='5')
{
flag=5;
}
if(i=='6')
{
flag=6;
}
}
// USART_ClearITPendingBit(USART1, USART_IT_RXNE);
}
int main(void)
{
HC_05_Init();
OLED_Init();
Motor_Init();
Key_Init();
Timer_Init();
HC_SR04_Init();
Servo_Init();
xunji_config();
OLED_ShowString(1, 1, "Mode:");
OLED_ShowString(2, 1, "flag:");
// OLED_ShowString(3, 1, "Right_Duty:00%");
OLED_ShowString(3, 1, "distance:");
OLED_ShowString(1, 10, "Angle:");
num3=0;
num2=0;
num1=0;
while (1)
{
Servo_SetAngle(90);
KeyNum = Key_GetNum();
if(KeyNum==1)
{
num1=3;
OLED_ShowNum(1, 6, num1, 2);
while(1)
{
int Distance_mm=sonar_mm();
int Distance_m=Distance_mm/1000;
int Distance_m_p=Distance_mm%1000;
OLED_Clear_Part(4,10,16);
OLED_ShowNum(4, 1,Distance_m,numlen(Distance_m));
OLED_ShowChar(4, 1+numlen(Distance_m), '.');
if(Distance_m_p<100)
{
OLED_ShowChar(4, 1+numlen(Distance_m)+1,'0');
OLED_ShowNum(4, 1+numlen(Distance_m)+2,Distance_m_p,numlen(Distance_m_p));
OLED_ShowChar(4, 1+numlen(Distance_m)+2+numlen(Distance_m_p), 'm');
}else
{
OLED_ShowNum(4, 1+numlen(Distance_m)+1,Distance_m_p,numlen(Distance_m_p));
OLED_ShowChar(4, 1+numlen(Distance_m)+1+numlen(Distance_m_p), 'm');
}
Delay_ms (50);
OLED_ShowNum(2, 6, flag, 2);
switch(flag)
{
case 0:stop(); break ;
case 1:run_left (); break ;
case 2:run_right (); break ;
case 3:back(); break ;
case 4:run(); break ;
case 5:back_left (); break ;
case 6:back_right(); break ;
default:stop(); break ;
}
}
}
if(KeyNum==2)//xunji
{
num2=2;
OLED_ShowNum(1, 6, num2, 2);
while(1)
{
int Distance_mm=sonar_mm();
int Distance_m=Distance_mm/1000;
int Distance_m_p=Distance_mm%1000;
OLED_Clear_Part(4,10,16);
OLED_ShowNum(4, 1,Distance_m,numlen(Distance_m));
OLED_ShowChar(4, 1+numlen(Distance_m), '.');
if(Distance_m_p<100)
{
OLED_ShowChar(4, 1+numlen(Distance_m)+1,'0');
OLED_ShowNum(4, 1+numlen(Distance_m)+2,Distance_m_p,numlen(Distance_m_p));
OLED_ShowChar(4, 1+numlen(Distance_m)+2+numlen(Distance_m_p), 'm');
}else
{
OLED_ShowNum(4, 1+numlen(Distance_m)+1,Distance_m_p,numlen(Distance_m_p));
OLED_ShowChar(4, 1+numlen(Distance_m)+1+numlen(Distance_m_p), 'm');
}
Delay_ms (50);
if(Distance_mm <=400)
{
back();
Delay_ms (100);
stop();
}
if(Distance_mm > 400)//4 is left
{
if(GPIO_ReadInputDataBit (GPIOB,GPIO_Pin_4)==1)//0000
{
if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_7)==1)
{
run();
Delay_ms (100);
stop();
}
if(GPIO_ReadInputDataBit (GPIOB,GPIO_Pin_4)==1)//0000
{
if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_7)==0)
{
run_left ();
Delay_ms (100);
stop();
}
}
}
if(GPIO_ReadInputDataBit (GPIOB,GPIO_Pin_4)==0)//0000
{
if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_7)==1)
{
run_right();
Delay_ms (100);
stop();
}
}
}
}
}
if(KeyNum == 3)
{
num3++;
OLED_ShowNum(1, 6, num3, 2);
if(num3 == 1)
{
while(1)
{
OLED_ShowNum(2, 14, Angle, 3);
int Distance_mm=sonar_mm();
int Distance_m=Distance_mm/1000;
int Distance_m_p=Distance_mm%1000;
OLED_Clear_Part(4,10,16);
OLED_ShowNum(4, 1,Distance_m,numlen(Distance_m));
OLED_ShowChar(4, 1+numlen(Distance_m), '.');
if(Distance_m_p<100)
{
OLED_ShowChar(4, 1+numlen(Distance_m)+1,'0');
OLED_ShowNum(4, 1+numlen(Distance_m)+2,Distance_m_p,numlen(Distance_m_p));
OLED_ShowChar(4, 1+numlen(Distance_m)+2+numlen(Distance_m_p), 'm');
}else
{
OLED_ShowNum(4, 1+numlen(Distance_m)+1,Distance_m_p,numlen(Distance_m_p));
OLED_ShowChar(4, 1+numlen(Distance_m)+1+numlen(Distance_m_p), 'm');
}
Delay_ms (50);
//void run//void back//void run_right//void back_right//void run_left//void back_left
if(Angle == 90)
{
if( Distance_mm > 400 )
{
run();
}
}
if(Angle == 90)
{
if( Distance_mm < 400 )
{
GPIO_ResetBits(GPIOB,GPIO_Pin_10);
Delay_ms(100);
GPIO_SetBits(GPIOB,GPIO_Pin_10);
back();
Delay_ms (300);
stop();
Angle=50; //left
OLED_ShowNum(2, 14, Angle, 3);
Servo_SetAngle(Angle);
Delay_ms (500);
Distance_mm=sonar_mm();
}
}
if(Angle == 50)
{
if( Distance_mm > 400)
{
run_left();
Delay_ms(150);
stop();
Angle=90;
OLED_ShowNum(2, 14, Angle, 3);
Servo_SetAngle(Angle);
}
}
if(Angle == 50)
{
if( Distance_mm < 400)
{
Angle=130;
OLED_ShowNum(2, 14, Angle, 3);
Servo_SetAngle(Angle);
Delay_ms (500);
Distance_mm=sonar_mm();
GPIO_ResetBits(GPIOB,GPIO_Pin_10);
Delay_ms(100);
GPIO_SetBits(GPIOB,GPIO_Pin_10);
}
}
if(Angle == 130)
{
if(Distance_mm >400)
{
run_right();
Delay_ms(150);
stop();
Angle=90;
OLED_ShowNum(2, 14, Angle, 3);
Servo_SetAngle(Angle);
Delay_ms (500);
}
}
if(Angle == 130)
{
if(Distance_mm <400)
{
GPIO_ResetBits(GPIOB,GPIO_Pin_10);
Delay_ms(100);
GPIO_SetBits(GPIOB,GPIO_Pin_10);
back();
Delay_ms(500);
Angle=90;
OLED_ShowNum(2, 14, Angle, 3);
Servo_SetAngle(Angle);
Delay_ms (500);
}
}
OLED_ShowNum(2, 14, Angle, 3);
}
}
}
OLED_ShowNum(2, 14, Angle, 3);
}
}
PUTCHAR_PROTOTYPE
{
/* Place your implementation of fputc here */
/* e.g. write a character to the USART */
USART_SendData(USART1, (uint8_t) ch);
/* Ñ»·µÈ´ýÖ±µ½·¢ËͽáÊø*/
while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET)
{}
return ch;
}
延时函数.c
#include "stm32f10x.h"
/**
* @brief 微秒级延时
* @param xus 延时时长,范围:0~233015
* @retval 无
*/
void Delay_us(uint32_t xus)
{
SysTick->LOAD = 72 * xus; //设置定时器重装值
SysTick->VAL = 0x00; //清空当前计数值
SysTick->CTRL = 0x00000005; //设置时钟源为HCLK,启动定时器
while(!(SysTick->CTRL & 0x00010000)); //等待计数到0
SysTick->CTRL = 0x00000004; //关闭定时器
}
/**
* @brief 毫秒级延时
* @param xms 延时时长,范围:0~4294967295
* @retval 无
*/
void Delay_ms(uint32_t xms)
{
while(xms--)
{
Delay_us(1000);
}
}
/**
* @brief 秒级延时
* @param xs 延时时长,范围:0~4294967295
* @retval 无
*/
void Delay_s(uint32_t xs)
{
while(xs--)
{
Delay_ms(1000);
}
}
延时函数.h
#ifndef __DELAY_H
#define __DELAY_H
void Delay_us(uint32_t us);
void Delay_ms(uint32_t ms);
void Delay_s(uint32_t s);
#endif
中断.c
#include "stm32f10x.h" // Device header
void Timer_Init(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //启用TIM3时钟
// https://blog.zeruns.tech
TIM_InternalClockConfig(TIM3); //设置TIM3使用内部时钟
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; //定义结构体,配置定时器
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //设置1分频(不分频)
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //设置计数模式为向上计数
TIM_TimeBaseInitStructure.TIM_Period = 10 - 1; //设置最大计数值,达到最大值触发更新事件,因为从0开始计数,所以计数10次是10-1,每10微秒触发一次
TIM_TimeBaseInitStructure.TIM_Prescaler = 72 - 1; //设置时钟预分频,72-1就是每 时钟频率(72Mhz)/72=1000000 个时钟周期计数器加1,每1微秒+1
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; //重复计数器(高级定时器才有,所以设置0)
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStructure); //初始化TIM3定时器
TIM_ClearFlag(TIM3, TIM_FLAG_Update); //清除更新中断标志位
TIM_ITConfig(TIM3, TIM_IT_Update, ENABLE); //开启更新中断
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //设置中断优先级分组
NVIC_InitTypeDef NVIC_InitStructure; //定义结构体,配置中断优先级
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn; //指定中断通道
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //中断使能
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; //设置抢占优先级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2; //设置响应优先级
NVIC_Init(&NVIC_InitStructure);
TIM_Cmd(TIM3, ENABLE); //开启定时器
}
/*
void TIM3_IRQHandler(void) //更新中断函数
{
if (TIM_GetITStatus(TIM3, TIM_IT_Update) == SET) //获取TIM3定时器的更新中断标志位
{
TIM_ClearITPendingBit(TIM3, TIM_IT_Update); //清除更新中断标志位
}
}*/
中断.h
#ifndef __TIMER_H
#define __TIMER_H
void Timer_Init(void);
#endif
按键.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
void Key_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1 | GPIO_Pin_9| GPIO_Pin_8;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStructure);
GPIO_SetBits(GPIOB,GPIO_Pin_10);
}
uint8_t Key_GetNum(void)
{
uint8_t KeyNum = 0;
if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_8) == 0)
{
Delay_ms(20);
while (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_8) == 0);
Delay_ms(20);
KeyNum = 1;
}
if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0)
{
Delay_ms(20);
while (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0);
Delay_ms(20);
KeyNum = 2;
}
if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_9) == 0)
{
Delay_ms(20);
while (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_9) == 0);
Delay_ms(20);
KeyNum = 3;
}
return KeyNum;
}
按键.h
#ifndef __KEY_H
#define __KEY_H
void Key_Init(void);
uint8_t Key_GetNum(void);
#endif
pwm舵机.c
#include "stm32f10x.h" // Device header
//#include "pwm.h"
//void PWM_Init1(void)//×óÇ°ÂÖ×Ó
//{
// RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
// RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
//
// GPIO_InitTypeDef GPIO_InitStructure;
// GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
// GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //GPIO_Pin_15;
// GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
// GPIO_Init(GPIOA, &GPIO_InitStructure);
//
// TIM_InternalClockConfig(TIM2);
//
// TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
// TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
// TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
// TIM_TimeBaseInitStructure.TIM_Period = 100 - 1; //ARR
// TIM_TimeBaseInitStructure.TIM_Prescaler = 720 - 1; //PSC
// TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;
// TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure);
//
// TIM_OCInitTypeDef TIM_OCInitStructure;
// TIM_OCStructInit(&TIM_OCInitStructure);
// TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
// TIM_OCInitStructure.TIM_OCPolarity = high;
// TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
// TIM_OCInitStructure.TIM_Pulse = 0; //CCR
// TIM_OC1Init(TIM2, &TIM_OCInitStructure);
// TIM_Cmd(TIM2, ENABLE);
//}
//void PWM_SetCompare1(uint16_t Compare1)
//{
// TIM_SetCompare1(TIM2, Compare1);
//}
//void PWM_SetPrescaler1(uint16_t Prescaler1)
//{
// TIM_PrescalerConfig(TIM2, Prescaler1, TIM_PSCReloadMode_Immediate);
//}
//void PWM_Init4(void)//ÓÒÇ°ÂÖ×Ó
//{
// RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
// RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
//
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);
GPIO_PinRemapConfig(GPIO_PartialRemap1_TIM2, ENABLE);
GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable, ENABLE);
//
// GPIO_InitTypeDef GPIO_InitStructure;
// GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
// GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6; //GPIO_Pin_15;
// GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
// GPIO_Init(GPIOA, &GPIO_InitStructure);
//
// TIM_InternalClockConfig(TIM3);
//
// TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
// TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
// TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
// TIM_TimeBaseInitStructure.TIM_Period = 100 - 1; //ARR
// TIM_TimeBaseInitStructure.TIM_Prescaler = 720 - 1; //PSC
// TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;
// TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStructure);
//
// TIM_OCInitTypeDef TIM_OCInitStructure;
// TIM_OCStructInit(&TIM_OCInitStructure);
// TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1 ;
// TIM_OCInitStructure.TIM_OCPolarity = TIM_OCNPolarity_High ;
// TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
// TIM_OCInitStructure.TIM_Pulse = 0; //CCR
// TIM_OC1Init(TIM3, &TIM_OCInitStructure);
//
// TIM_Cmd(TIM3, ENABLE);
//}
//void PWM_SetCompare4(uint16_t Compare4)
//{
// TIM_SetCompare1(TIM3, Compare4);
//}
//void PWM_SetPrescaler4(uint16_t Prescaler4)
//{
// TIM_PrescalerConfig(TIM3, Prescaler4, TIM_PSCReloadMode_Immediate);
//}
void PWMSG_Init(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
// RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE); ´ò¿ªafilÄÚ²¿Ê±ÖÓ
// GPIO_PinRemapConfig(GPIO_PartialRemap1_TIM2, ENABLE); ÖØж¨ÒåÒý½ÅÍâÉè
// GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable, ENABLE); ½â³ýÔ±¾a15£¬b3£¬b4µÄµ÷ÊÔ¹¦ÄÜ
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
TIM_InternalClockConfig(TIM2);
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInitStructure.TIM_Period = 20000 - 1; //ARR
TIM_TimeBaseInitStructure.TIM_Prescaler = 72 - 1; //PSC
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure);
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_OCStructInit(&TIM_OCInitStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = 0; //CCR
TIM_OC2Init(TIM2, &TIM_OCInitStructure);
//TIM_OC1InitÓõÄÊÇgpioµÄa0ͨµÀ£¬ÕâÀïÓõÄÊÇa1ËùÒÔ¿ªÆôµÄÊÇoc2£¬ÒÔ´ËÀàÍÆ£¬È»ºóÏÂÃæµÄcompare¶ÔÓ¦µÄÒ²ÊÇocÒ»ÑùµÄ
TIM_Cmd(TIM2, ENABLE);
}
void PWM_SetCompare2(uint16_t Compare)
{
TIM_SetCompare2(TIM2, Compare);
}
pwm舵机.h
#ifndef __PWM_H
#define __PWM_H
//#define high TIM_OCPolarity_High
//#define low TIM_OCPolarity_Low
//void PWM_Init1(void);//×óÇ°ÂÖ×Ó
//void PWM_SetCompare1(uint16_t Compare1);
//void PWM_SetPrescaler1(uint16_t Prescaler1);
//void PWM_Init4(void);//ÓÒÇ°ÂÖ×Ó
//void PWM_SetCompare4(uint16_t Compare4);
//void PWM_SetPrescaler4(uint16_t Prescaler4);
void PWMSG_Init(void);
void PWM_SetCompare2(uint16_t Compare);
#endif
电机.c
#include "stm32f10x.h" // Device header
#include "pwm.h"
//01 right_behind
//23 right_back
//67 left_behind
//45 left_back
void Motor_Init(void)
{
// PWM_Init1();//×óÇ°ÂÖ×Ó
// PWM_Init4();//ÓÒÇ°ÂÖ×Ó
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2 | GPIO_Pin_3 | GPIO_Pin_4 | GPIO_Pin_5 | GPIO_Pin_7| GPIO_Pin_6;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_14 |GPIO_Pin_0|GPIO_Pin_11;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
// PWM_SetPrescaler4(720 - 1);
// PWM_SetPrescaler1(720 - 1);//a0
}
//ºóÍ˵Äʱºò¸ø0£¬Ô½Ð¡Ô½ÓÐËÙ¶È
//Ç°½øµÄʱºò¸ø100£¬Ô½´óÔ½ÓÐËÙ¶È
//100,100
void run(void)//Ö±×ß
{
GPIO_ResetBits(GPIOA, GPIO_Pin_3| GPIO_Pin_5| GPIO_Pin_7);
GPIO_ResetBits(GPIOB, GPIO_Pin_11);
// PWM_SetCompare1(right);
// PWM_SetCompare4(left);
GPIO_SetBits (GPIOA,GPIO_Pin_2);
GPIO_SetBits (GPIOA,GPIO_Pin_4);
GPIO_SetBits (GPIOB,GPIO_Pin_0);
GPIO_SetBits (GPIOA,GPIO_Pin_6);
GPIO_SetBits (GPIOB,GPIO_Pin_14);
}
//0,0
void back(void)//ºóÍË
{
GPIO_SetBits(GPIOA, GPIO_Pin_3| GPIO_Pin_5| GPIO_Pin_7);
GPIO_SetBits(GPIOB, GPIO_Pin_11);
// PWM_SetCompare1(right);
// PWM_SetCompare4(left);
GPIO_ResetBits (GPIOA,GPIO_Pin_2);
GPIO_ResetBits (GPIOA,GPIO_Pin_4);
GPIO_ResetBits (GPIOB,GPIO_Pin_0);
GPIO_ResetBits (GPIOA,GPIO_Pin_6);
GPIO_SetBits (GPIOB,GPIO_Pin_14);
}
//0,100
void run_right(void)//×óÇ°
{
GPIO_ResetBits(GPIOA, GPIO_Pin_5| GPIO_Pin_7);
// PWM_SetCompare1(right);
// PWM_SetCompare4(left);
GPIO_SetBits (GPIOA,GPIO_Pin_4);
GPIO_SetBits (GPIOA,GPIO_Pin_6);
GPIO_SetBits (GPIOB,GPIO_Pin_14);
}
//0,0
void back_right(void)//×óºó
{
GPIO_SetBits(GPIOA, GPIO_Pin_5| GPIO_Pin_7);
// PWM_SetCompare1(right);
// PWM_SetCompare4(left);
GPIO_ResetBits (GPIOA,GPIO_Pin_4);
GPIO_ResetBits (GPIOA,GPIO_Pin_6);
GPIO_SetBits (GPIOB,GPIO_Pin_14);
}
//100,0
void run_left(void)//ÓÒÇ°
{
GPIO_ResetBits(GPIOA, GPIO_Pin_3);
GPIO_ResetBits(GPIOB, GPIO_Pin_11);
// PWM_SetCompare1(right);
// PWM_SetCompare4(left);
GPIO_SetBits (GPIOA,GPIO_Pin_2);
GPIO_SetBits (GPIOB,GPIO_Pin_0);
GPIO_SetBits (GPIOB,GPIO_Pin_14);
}
//0,0
void back_left(void)//ÓÒºó
{
GPIO_SetBits(GPIOA, GPIO_Pin_3);
GPIO_SetBits(GPIOB, GPIO_Pin_11);
// PWM_SetCompare1(right);
// PWM_SetCompare4(left);
GPIO_ResetBits (GPIOA,GPIO_Pin_2);
GPIO_ResetBits (GPIOB,GPIO_Pin_0);
GPIO_SetBits (GPIOB,GPIO_Pin_14);
}
void stop(void)//Í£Ö¹
{
GPIO_ResetBits (GPIOB,GPIO_Pin_14);
}电机.h
#ifndef __MOTOR_H__
#define __MOTOR_H__
//01 right_behind
//23 right_back
//67 left_behind
//45 left_back
void Motor_Init(void);
void run(void);//Ö±×ß100100
void back(void);//ºóÍË00
void run_right(void);//×óÇ°//0,100
void back_right(void);//×óºó//0,0
void run_left(void);//ÓÒÇ°//100,0
void back_left(void);//ÓÒºó//0,0
void stop(void);//Í£Ö¹
#endif
超声波.c
#include "stm32f10x.h"
#include "Delay.h"
/*
具体使用说明请到我博客:// https://blog.zeruns.tech
*/
#define Echo GPIO_Pin_6 //HC-SR04模块的Echo脚接GPIOB6
#define Trig GPIO_Pin_5 //HC-SR04模块的Trig脚接GPIOB5
uint64_t time=0; //声明变量,用来计时
uint64_t time_end=0; //声明变量,存储回波信号时间
void HC_SR04_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE); //启用GPIOB的外设时钟
GPIO_InitTypeDef GPIO_InitStructure; //定义结构体
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //设置GPIO口为推挽输出
GPIO_InitStructure.GPIO_Pin = Trig; //设置GPIO口5
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //设置GPIO口速度50Mhz
GPIO_Init(GPIOB,&GPIO_InitStructure); //初始化GPIOB
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD; //设置GPIO口为下拉输入模式
GPIO_InitStructure.GPIO_Pin = Echo; //设置GPIO口6
GPIO_Init(GPIOB,&GPIO_InitStructure); //初始化GPIOB
GPIO_WriteBit(GPIOB,GPIO_Pin_5,0); //输出低电平
Delay_us(15); //延时15微秒
}
int16_t sonar_mm(void) //测距并返回单位为毫米的距离结果
{
uint32_t Distance,Distance_mm = 0;
GPIO_WriteBit(GPIOB,Trig,1); //输出高电平
Delay_us(15); //延时15微秒
GPIO_WriteBit(GPIOB,Trig,0); //输出低电平
while(GPIO_ReadInputDataBit(GPIOB,Echo)==0); //等待低电平结束
time=0; //计时清零
while(GPIO_ReadInputDataBit(GPIOB,Echo)==1); //等待高电平结束
time_end=time; //记录结束时的时间
if(time_end/100<38) //判断是否小于38毫秒,大于38毫秒的就是超时,直接调到下面返回0
{
Distance=(time_end*346)/2; //计算距离,25°C空气中的音速为346m/s
Distance_mm=Distance/100; //因为上面的time_end的单位是10微秒,所以要得出单位为毫米的距离结果,还得除以100
}
return Distance_mm; //返回测距结果
}
float sonar(void) //测距并返回单位为米的距离结果
{
uint32_t Distance,Distance_mm = 0;
float Distance_m=0;
GPIO_WriteBit(GPIOB,Trig,1); //输出高电平
Delay_us(15);
GPIO_WriteBit(GPIOB,Trig,0); //输出低电平
while(GPIO_ReadInputDataBit(GPIOB,Echo)==0);
time=0;
while(GPIO_ReadInputDataBit(GPIOB,Echo)==1);
time_end=time;
if(time_end/100<38)
{
Distance=(time_end*346)/2;
Distance_mm=Distance/100;
Distance_m=Distance_mm/1000;
}
return Distance_m;
}
void TIM3_IRQHandler(void) //更新中断函数,用来计时,每10微秒变量time加1
{ // https://blog.zeruns.tech
if (TIM_GetITStatus(TIM3, TIM_IT_Update) == SET) //获取TIM3定时器的更新中断标志位
{
time++;
TIM_ClearITPendingBit(TIM3, TIM_IT_Update); //清除更新中断标志位
}
}超声波.h
#ifndef __HCSR04_H
#define __HCSR04_H
void HC_SR04_Init(void);
int16_t sonar_mm(void);
float sonar(void);
#endif
oled的三个文件
#include "stm32f10x.h"
#include "OLED_Font.h"
/*引脚配置*/
#define OLED_SCL GPIO_Pin_12 //OLED屏的SCL脚接GPIOB12
#define OLED_SDA GPIO_Pin_13 //OLED屏的SDA脚接GPIOB13
#define OLED_W_SCL(x) GPIO_WriteBit(GPIOB, OLED_SCL, (BitAction)(x))
#define OLED_W_SDA(x) GPIO_WriteBit(GPIOB, OLED_SDA, (BitAction)(x))
/*引脚初始化*/
void OLED_I2C_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Pin = OLED_SCL;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = OLED_SDA;
GPIO_Init(GPIOB, &GPIO_InitStructure);
OLED_W_SCL(1);
OLED_W_SDA(1);
}
// https://blog.zeruns.tech
/**
* @brief I2C开始
* @param 无
* @retval 无
*/
void OLED_I2C_Start(void)
{
OLED_W_SDA(1);
OLED_W_SCL(1);
OLED_W_SDA(0);
OLED_W_SCL(0);
}
/**
* @brief I2C停止
* @param 无
* @retval 无
*/
void OLED_I2C_Stop(void)
{
OLED_W_SDA(0);
OLED_W_SCL(1);
OLED_W_SDA(1);
}
/**
* @brief I2C发送一个字节
* @param Byte 要发送的一个字节
* @retval 无
*/
void OLED_I2C_SendByte(uint8_t Byte)
{
uint8_t i;
for (i = 0; i < 8; i++)
{
OLED_W_SDA(Byte & (0x80 >> i));
OLED_W_SCL(1);
OLED_W_SCL(0);
}
OLED_W_SCL(1); //额外的一个时钟,不处理应答信号
OLED_W_SCL(0);
}
/**
* @brief OLED写命令
* @param Command 要写入的命令
* @retval 无
*/
void OLED_WriteCommand(uint8_t Command)
{
OLED_I2C_Start();
OLED_I2C_SendByte(0x78); //从机地址
OLED_I2C_SendByte(0x00); //写命令
OLED_I2C_SendByte(Command);
OLED_I2C_Stop();
}
/**
* @brief OLED写数据
* @param Data 要写入的数据
* @retval 无
*/
void OLED_WriteData(uint8_t Data)
{
OLED_I2C_Start();
OLED_I2C_SendByte(0x78); //从机地址
OLED_I2C_SendByte(0x40); //写数据
OLED_I2C_SendByte(Data);
OLED_I2C_Stop();
}
/**
* @brief OLED设置光标位置
* @param Y 以左上角为原点,向下方向的坐标,范围:0~7
* @param X 以左上角为原点,向右方向的坐标,范围:0~127
* @retval 无
*/
void OLED_SetCursor(uint8_t Y, uint8_t X)
{
OLED_WriteCommand(0xB0 | Y); //设置Y位置
OLED_WriteCommand(0x10 | ((X & 0xF0) >> 4)); //设置X位置低4位
OLED_WriteCommand(0x00 | (X & 0x0F)); //设置X位置高4位
}
/**
* @brief OLED清屏
* @param 无
* @retval 无
*/
void OLED_Clear(void)
{
uint8_t i, j;
for (j = 0; j < 8; j++)
{
OLED_SetCursor(j, 0);
for(i = 0; i < 128; i++)
{
OLED_WriteData(0x00);
}
}
}
/**
* @brief OLED部分清屏
* @param Line 行位置,范围:1~4
* @param start 列开始位置,范围:1~16
* @param end 列开始位置,范围:1~16
* @retval 无
*/
void OLED_Clear_Part(uint8_t Line, uint8_t start, uint8_t end)
{
uint8_t i,Column;
for(Column = start; Column <= end; Column++)
{
OLED_SetCursor((Line - 1) * 2, (Column - 1) * 8); //设置光标位置在上半部分
for (i = 0; i < 8; i++)
{
OLED_WriteData(0x00); //显示上半部分内容
}
OLED_SetCursor((Line - 1) * 2 + 1, (Column - 1) * 8); //设置光标位置在下半部分
for (i = 0; i < 8; i++)
{
OLED_WriteData(0x00); //显示下半部分内容
}
}
}
/**
* @brief OLED显示一个字符
* @param Line 行位置,范围:1~4
* @param Column 列位置,范围:1~16
* @param Char 要显示的一个字符,范围:ASCII可见字符
* @retval 无
*/
void OLED_ShowChar(uint8_t Line, uint8_t Column, char Char)
{
uint8_t i;
OLED_SetCursor((Line - 1) * 2, (Column - 1) * 8); //设置光标位置在上半部分
for (i = 0; i < 8; i++)
{
OLED_WriteData(OLED_F8x16[Char - ' '][i]); //显示上半部分内容
}
OLED_SetCursor((Line - 1) * 2 + 1, (Column - 1) * 8); //设置光标位置在下半部分
for (i = 0; i < 8; i++)
{
OLED_WriteData(OLED_F8x16[Char - ' '][i + 8]); //显示下半部分内容
}
}
/**
* @brief OLED显示字符串
* @param Line 起始行位置,范围:1~4
* @param Column 起始列位置,范围:1~16
* @param String 要显示的字符串,范围:ASCII可见字符
* @retval 无
*/
void OLED_ShowString(uint8_t Line, uint8_t Column, char *String)
{
uint8_t i;
for (i = 0; String[i] != '\0'; i++)
{
OLED_ShowChar(Line, Column + i, String[i]);
}
}
/**
* @brief OLED次方函数
* @retval 返回值等于X的Y次方
*/
uint32_t OLED_Pow(uint32_t X, uint32_t Y)
{
uint32_t Result = 1;
while (Y--)
{
Result *= X;
}
return Result;
}
/**
* @brief OLED显示数字(十进制,正数)
* @param Line 起始行位置,范围:1~4
* @param Column 起始列位置,范围:1~16
* @param Number 要显示的数字,范围:0~4294967295
* @param Length 要显示数字的长度,范围:1~10
* @retval 无
*/
void OLED_ShowNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length)
{
uint8_t i;
for (i = 0; i < Length; i++)
{
OLED_ShowChar(Line, Column + i, Number / OLED_Pow(10, Length - i - 1) % 10 + '0');
}
}
/**
* @brief OLED显示数字(十进制,带符号数)
* @param Line 起始行位置,范围:1~4
* @param Column 起始列位置,范围:1~16
* @param Number 要显示的数字,范围:-2147483648~2147483647
* @param Length 要显示数字的长度,范围:1~10
* @retval 无
*/
void OLED_ShowSignedNum(uint8_t Line, uint8_t Column, int32_t Number, uint8_t Length)
{
uint8_t i;
uint32_t Number1;
if (Number >= 0)
{
OLED_ShowChar(Line, Column, '+');
Number1 = Number;
}
else
{
OLED_ShowChar(Line, Column, '-');
Number1 = -Number;
}
for (i = 0; i < Length; i++)
{
OLED_ShowChar(Line, Column + i + 1, Number1 / OLED_Pow(10, Length - i - 1) % 10 + '0');
}
}
/**
* @brief OLED显示数字(十六进制,正数)
* @param Line 起始行位置,范围:1~4
* @param Column 起始列位置,范围:1~16
* @param Number 要显示的数字,范围:0~0xFFFFFFFF
* @param Length 要显示数字的长度,范围:1~8
* @retval 无
*/
void OLED_ShowHexNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length)
{
uint8_t i, SingleNumber;
for (i = 0; i < Length; i++)
{
SingleNumber = Number / OLED_Pow(16, Length - i - 1) % 16;
if (SingleNumber < 10)
{
OLED_ShowChar(Line, Column + i, SingleNumber + '0');
}
else
{
OLED_ShowChar(Line, Column + i, SingleNumber - 10 + 'A');
}
}
}
/**
* @brief OLED显示数字(二进制,正数)
* @param Line 起始行位置,范围:1~4
* @param Column 起始列位置,范围:1~16
* @param Number 要显示的数字,范围:0~1111 1111 1111 1111
* @param Length 要显示数字的长度,范围:1~16
* @retval 无
*/
void OLED_ShowBinNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length)
{
uint8_t i;
for (i = 0; i < Length; i++)
{
OLED_ShowChar(Line, Column + i, Number / OLED_Pow(2, Length - i - 1) % 2 + '0');
}
}
/**
* @brief OLED初始化
* @param 无
* @retval 无
*/
void OLED_Init(void)
{
uint32_t i, j;
for (i = 0; i < 1000; i++) //上电延时
{
for (j = 0; j < 1000; j++);
}
OLED_I2C_Init(); //端口初始化
OLED_WriteCommand(0xAE); //关闭显示
OLED_WriteCommand(0xD5); //设置显示时钟分频比/振荡器频率
OLED_WriteCommand(0x80);
OLED_WriteCommand(0xA8); //设置多路复用率
OLED_WriteCommand(0x3F);
OLED_WriteCommand(0xD3); //设置显示偏移
OLED_WriteCommand(0x00);
OLED_WriteCommand(0x40); //设置显示开始行
OLED_WriteCommand(0xA1); //设置左右方向,0xA1正常 0xA0左右反置
OLED_WriteCommand(0xC8); //设置上下方向,0xC8正常 0xC0上下反置
OLED_WriteCommand(0xDA); //设置COM引脚硬件配置
OLED_WriteCommand(0x12);
OLED_WriteCommand(0x81); //设置对比度控制
OLED_WriteCommand(0xCF);
OLED_WriteCommand(0xD9); //设置预充电周期
OLED_WriteCommand(0xF1);
OLED_WriteCommand(0xDB); //设置VCOMH取消选择级别
OLED_WriteCommand(0x30);
OLED_WriteCommand(0xA4); //设置整个显示打开/关闭
OLED_WriteCommand(0xA6); //设置正常/倒转显示
OLED_WriteCommand(0x8D); //设置充电泵
OLED_WriteCommand(0x14);
OLED_WriteCommand(0xAF); //开启显示
OLED_Clear(); //OLED清屏
}
#ifndef __OLED_H
#define __OLED_H
void OLED_Init(void);
void OLED_Clear(void);
void OLED_ShowChar(uint8_t Line, uint8_t Column, char Char);
void OLED_ShowString(uint8_t Line, uint8_t Column, char *String);
void OLED_ShowNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length);
void OLED_ShowSignedNum(uint8_t Line, uint8_t Column, int32_t Number, uint8_t Length);
void OLED_ShowHexNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length);
void OLED_ShowBinNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length);
void OLED_Clear_Part(uint8_t Line, uint8_t start, uint8_t end);
#endif
#ifndef __OLED_FONT_H
#define __OLED_FONT_H
/*OLED字模库,宽8像素,高16像素*/
const uint8_t OLED_F8x16[][16]=
{
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,// 0
0x00,0x00,0x00,0xF8,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x33,0x30,0x00,0x00,0x00,//! 1
0x00,0x10,0x0C,0x06,0x10,0x0C,0x06,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//" 2
0x40,0xC0,0x78,0x40,0xC0,0x78,0x40,0x00,
0x04,0x3F,0x04,0x04,0x3F,0x04,0x04,0x00,//# 3
0x00,0x70,0x88,0xFC,0x08,0x30,0x00,0x00,
0x00,0x18,0x20,0xFF,0x21,0x1E,0x00,0x00,//$ 4
0xF0,0x08,0xF0,0x00,0xE0,0x18,0x00,0x00,
0x00,0x21,0x1C,0x03,0x1E,0x21,0x1E,0x00,//% 5
0x00,0xF0,0x08,0x88,0x70,0x00,0x00,0x00,
0x1E,0x21,0x23,0x24,0x19,0x27,0x21,0x10,//& 6
0x10,0x16,0x0E,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//' 7
0x00,0x00,0x00,0xE0,0x18,0x04,0x02,0x00,
0x00,0x00,0x00,0x07,0x18,0x20,0x40,0x00,//( 8
0x00,0x02,0x04,0x18,0xE0,0x00,0x00,0x00,
0x00,0x40,0x20,0x18,0x07,0x00,0x00,0x00,//) 9
0x40,0x40,0x80,0xF0,0x80,0x40,0x40,0x00,
0x02,0x02,0x01,0x0F,0x01,0x02,0x02,0x00,//* 10
0x00,0x00,0x00,0xF0,0x00,0x00,0x00,0x00,
0x01,0x01,0x01,0x1F,0x01,0x01,0x01,0x00,//+ 11
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x80,0xB0,0x70,0x00,0x00,0x00,0x00,0x00,//, 12
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x01,0x01,0x01,0x01,0x01,0x01,0x01,//- 13
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x30,0x30,0x00,0x00,0x00,0x00,0x00,//. 14
0x00,0x00,0x00,0x00,0x80,0x60,0x18,0x04,
0x00,0x60,0x18,0x06,0x01,0x00,0x00,0x00,/// 15
0x00,0xE0,0x10,0x08,0x08,0x10,0xE0,0x00,
0x00,0x0F,0x10,0x20,0x20,0x10,0x0F,0x00,//0 16
0x00,0x10,0x10,0xF8,0x00,0x00,0x00,0x00,
0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//1 17
0x00,0x70,0x08,0x08,0x08,0x88,0x70,0x00,
0x00,0x30,0x28,0x24,0x22,0x21,0x30,0x00,//2 18
0x00,0x30,0x08,0x88,0x88,0x48,0x30,0x00,
0x00,0x18,0x20,0x20,0x20,0x11,0x0E,0x00,//3 19
0x00,0x00,0xC0,0x20,0x10,0xF8,0x00,0x00,
0x00,0x07,0x04,0x24,0x24,0x3F,0x24,0x00,//4 20
0x00,0xF8,0x08,0x88,0x88,0x08,0x08,0x00,
0x00,0x19,0x21,0x20,0x20,0x11,0x0E,0x00,//5 21
0x00,0xE0,0x10,0x88,0x88,0x18,0x00,0x00,
0x00,0x0F,0x11,0x20,0x20,0x11,0x0E,0x00,//6 22
0x00,0x38,0x08,0x08,0xC8,0x38,0x08,0x00,
0x00,0x00,0x00,0x3F,0x00,0x00,0x00,0x00,//7 23
0x00,0x70,0x88,0x08,0x08,0x88,0x70,0x00,
0x00,0x1C,0x22,0x21,0x21,0x22,0x1C,0x00,//8 24
0x00,0xE0,0x10,0x08,0x08,0x10,0xE0,0x00,
0x00,0x00,0x31,0x22,0x22,0x11,0x0F,0x00,//9 25
0x00,0x00,0x00,0xC0,0xC0,0x00,0x00,0x00,
0x00,0x00,0x00,0x30,0x30,0x00,0x00,0x00,//: 26
0x00,0x00,0x00,0x80,0x00,0x00,0x00,0x00,
0x00,0x00,0x80,0x60,0x00,0x00,0x00,0x00,//; 27
0x00,0x00,0x80,0x40,0x20,0x10,0x08,0x00,
0x00,0x01,0x02,0x04,0x08,0x10,0x20,0x00,//< 28
0x40,0x40,0x40,0x40,0x40,0x40,0x40,0x00,
0x04,0x04,0x04,0x04,0x04,0x04,0x04,0x00,//= 29
0x00,0x08,0x10,0x20,0x40,0x80,0x00,0x00,
0x00,0x20,0x10,0x08,0x04,0x02,0x01,0x00,//> 30
0x00,0x70,0x48,0x08,0x08,0x08,0xF0,0x00,
0x00,0x00,0x00,0x30,0x36,0x01,0x00,0x00,//? 31
0xC0,0x30,0xC8,0x28,0xE8,0x10,0xE0,0x00,
0x07,0x18,0x27,0x24,0x23,0x14,0x0B,0x00,//@ 32
0x00,0x00,0xC0,0x38,0xE0,0x00,0x00,0x00,
0x20,0x3C,0x23,0x02,0x02,0x27,0x38,0x20,//A 33
0x08,0xF8,0x88,0x88,0x88,0x70,0x00,0x00,
0x20,0x3F,0x20,0x20,0x20,0x11,0x0E,0x00,//B 34
0xC0,0x30,0x08,0x08,0x08,0x08,0x38,0x00,
0x07,0x18,0x20,0x20,0x20,0x10,0x08,0x00,//C 35
0x08,0xF8,0x08,0x08,0x08,0x10,0xE0,0x00,
0x20,0x3F,0x20,0x20,0x20,0x10,0x0F,0x00,//D 36
0x08,0xF8,0x88,0x88,0xE8,0x08,0x10,0x00,
0x20,0x3F,0x20,0x20,0x23,0x20,0x18,0x00,//E 37
0x08,0xF8,0x88,0x88,0xE8,0x08,0x10,0x00,
0x20,0x3F,0x20,0x00,0x03,0x00,0x00,0x00,//F 38
0xC0,0x30,0x08,0x08,0x08,0x38,0x00,0x00,
0x07,0x18,0x20,0x20,0x22,0x1E,0x02,0x00,//G 39
0x08,0xF8,0x08,0x00,0x00,0x08,0xF8,0x08,
0x20,0x3F,0x21,0x01,0x01,0x21,0x3F,0x20,//H 40
0x00,0x08,0x08,0xF8,0x08,0x08,0x00,0x00,
0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//I 41
0x00,0x00,0x08,0x08,0xF8,0x08,0x08,0x00,
0xC0,0x80,0x80,0x80,0x7F,0x00,0x00,0x00,//J 42
0x08,0xF8,0x88,0xC0,0x28,0x18,0x08,0x00,
0x20,0x3F,0x20,0x01,0x26,0x38,0x20,0x00,//K 43
0x08,0xF8,0x08,0x00,0x00,0x00,0x00,0x00,
0x20,0x3F,0x20,0x20,0x20,0x20,0x30,0x00,//L 44
0x08,0xF8,0xF8,0x00,0xF8,0xF8,0x08,0x00,
0x20,0x3F,0x00,0x3F,0x00,0x3F,0x20,0x00,//M 45
0x08,0xF8,0x30,0xC0,0x00,0x08,0xF8,0x08,
0x20,0x3F,0x20,0x00,0x07,0x18,0x3F,0x00,//N 46
0xE0,0x10,0x08,0x08,0x08,0x10,0xE0,0x00,
0x0F,0x10,0x20,0x20,0x20,0x10,0x0F,0x00,//O 47
0x08,0xF8,0x08,0x08,0x08,0x08,0xF0,0x00,
0x20,0x3F,0x21,0x01,0x01,0x01,0x00,0x00,//P 48
0xE0,0x10,0x08,0x08,0x08,0x10,0xE0,0x00,
0x0F,0x18,0x24,0x24,0x38,0x50,0x4F,0x00,//Q 49
0x08,0xF8,0x88,0x88,0x88,0x88,0x70,0x00,
0x20,0x3F,0x20,0x00,0x03,0x0C,0x30,0x20,//R 50
0x00,0x70,0x88,0x08,0x08,0x08,0x38,0x00,
0x00,0x38,0x20,0x21,0x21,0x22,0x1C,0x00,//S 51
0x18,0x08,0x08,0xF8,0x08,0x08,0x18,0x00,
0x00,0x00,0x20,0x3F,0x20,0x00,0x00,0x00,//T 52
0x08,0xF8,0x08,0x00,0x00,0x08,0xF8,0x08,
0x00,0x1F,0x20,0x20,0x20,0x20,0x1F,0x00,//U 53
0x08,0x78,0x88,0x00,0x00,0xC8,0x38,0x08,
0x00,0x00,0x07,0x38,0x0E,0x01,0x00,0x00,//V 54
0xF8,0x08,0x00,0xF8,0x00,0x08,0xF8,0x00,
0x03,0x3C,0x07,0x00,0x07,0x3C,0x03,0x00,//W 55
0x08,0x18,0x68,0x80,0x80,0x68,0x18,0x08,
0x20,0x30,0x2C,0x03,0x03,0x2C,0x30,0x20,//X 56
0x08,0x38,0xC8,0x00,0xC8,0x38,0x08,0x00,
0x00,0x00,0x20,0x3F,0x20,0x00,0x00,0x00,//Y 57
0x10,0x08,0x08,0x08,0xC8,0x38,0x08,0x00,
0x20,0x38,0x26,0x21,0x20,0x20,0x18,0x00,//Z 58
0x00,0x00,0x00,0xFE,0x02,0x02,0x02,0x00,
0x00,0x00,0x00,0x7F,0x40,0x40,0x40,0x00,//[ 59
0x00,0x0C,0x30,0xC0,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x01,0x06,0x38,0xC0,0x00,//\ 60
0x00,0x02,0x02,0x02,0xFE,0x00,0x00,0x00,
0x00,0x40,0x40,0x40,0x7F,0x00,0x00,0x00,//] 61
0x00,0x00,0x04,0x02,0x02,0x02,0x04,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//^ 62
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x80,0x80,0x80,0x80,0x80,0x80,0x80,0x80,//_ 63
0x00,0x02,0x02,0x04,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//` 64
0x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,
0x00,0x19,0x24,0x22,0x22,0x22,0x3F,0x20,//a 65
0x08,0xF8,0x00,0x80,0x80,0x00,0x00,0x00,
0x00,0x3F,0x11,0x20,0x20,0x11,0x0E,0x00,//b 66
0x00,0x00,0x00,0x80,0x80,0x80,0x00,0x00,
0x00,0x0E,0x11,0x20,0x20,0x20,0x11,0x00,//c 67
0x00,0x00,0x00,0x80,0x80,0x88,0xF8,0x00,
0x00,0x0E,0x11,0x20,0x20,0x10,0x3F,0x20,//d 68
0x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,
0x00,0x1F,0x22,0x22,0x22,0x22,0x13,0x00,//e 69
0x00,0x80,0x80,0xF0,0x88,0x88,0x88,0x18,
0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//f 70
0x00,0x00,0x80,0x80,0x80,0x80,0x80,0x00,
0x00,0x6B,0x94,0x94,0x94,0x93,0x60,0x00,//g 71
0x08,0xF8,0x00,0x80,0x80,0x80,0x00,0x00,
0x20,0x3F,0x21,0x00,0x00,0x20,0x3F,0x20,//h 72
0x00,0x80,0x98,0x98,0x00,0x00,0x00,0x00,
0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//i 73
0x00,0x00,0x00,0x80,0x98,0x98,0x00,0x00,
0x00,0xC0,0x80,0x80,0x80,0x7F,0x00,0x00,//j 74
0x08,0xF8,0x00,0x00,0x80,0x80,0x80,0x00,
0x20,0x3F,0x24,0x02,0x2D,0x30,0x20,0x00,//k 75
0x00,0x08,0x08,0xF8,0x00,0x00,0x00,0x00,
0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//l 76
0x80,0x80,0x80,0x80,0x80,0x80,0x80,0x00,
0x20,0x3F,0x20,0x00,0x3F,0x20,0x00,0x3F,//m 77
0x80,0x80,0x00,0x80,0x80,0x80,0x00,0x00,
0x20,0x3F,0x21,0x00,0x00,0x20,0x3F,0x20,//n 78
0x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,
0x00,0x1F,0x20,0x20,0x20,0x20,0x1F,0x00,//o 79
0x80,0x80,0x00,0x80,0x80,0x00,0x00,0x00,
0x80,0xFF,0xA1,0x20,0x20,0x11,0x0E,0x00,//p 80
0x00,0x00,0x00,0x80,0x80,0x80,0x80,0x00,
0x00,0x0E,0x11,0x20,0x20,0xA0,0xFF,0x80,//q 81
0x80,0x80,0x80,0x00,0x80,0x80,0x80,0x00,
0x20,0x20,0x3F,0x21,0x20,0x00,0x01,0x00,//r 82
0x00,0x00,0x80,0x80,0x80,0x80,0x80,0x00,
0x00,0x33,0x24,0x24,0x24,0x24,0x19,0x00,//s 83
0x00,0x80,0x80,0xE0,0x80,0x80,0x00,0x00,
0x00,0x00,0x00,0x1F,0x20,0x20,0x00,0x00,//t 84
0x80,0x80,0x00,0x00,0x00,0x80,0x80,0x00,
0x00,0x1F,0x20,0x20,0x20,0x10,0x3F,0x20,//u 85
0x80,0x80,0x80,0x00,0x00,0x80,0x80,0x80,
0x00,0x01,0x0E,0x30,0x08,0x06,0x01,0x00,//v 86
0x80,0x80,0x00,0x80,0x00,0x80,0x80,0x80,
0x0F,0x30,0x0C,0x03,0x0C,0x30,0x0F,0x00,//w 87
0x00,0x80,0x80,0x00,0x80,0x80,0x80,0x00,
0x00,0x20,0x31,0x2E,0x0E,0x31,0x20,0x00,//x 88
0x80,0x80,0x80,0x00,0x00,0x80,0x80,0x80,
0x80,0x81,0x8E,0x70,0x18,0x06,0x01,0x00,//y 89
0x00,0x80,0x80,0x80,0x80,0x80,0x80,0x00,
0x00,0x21,0x30,0x2C,0x22,0x21,0x30,0x00,//z 90
0x00,0x00,0x00,0x00,0x80,0x7C,0x02,0x02,
0x00,0x00,0x00,0x00,0x00,0x3F,0x40,0x40,//{ 91
0x00,0x00,0x00,0x00,0xFF,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0xFF,0x00,0x00,0x00,//| 92
0x00,0x02,0x02,0x7C,0x80,0x00,0x00,0x00,
0x00,0x40,0x40,0x3F,0x00,0x00,0x00,0x00,//} 93
0x00,0x06,0x01,0x01,0x02,0x02,0x04,0x04,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//~ 94
};
#endif
舵机,之前的那个是pwm控制占空比的,这个才是真正的舵机.c
#include "stm32f10x.h" // Device header
#include "PWM.h"
void Servo_Init(void)
{
PWMSG_Init();
}
void Servo_SetAngle(float Angle)
{
PWM_SetCompare2(Angle / 180 * 2000 + 500);
}
舵机.h
##ifndef __SERVO_H
#define __SERVO_H
void Servo_Init(void);
void Servo_SetAngle(float Angle);
#endif
#ifndef __SERVO_H
#define __SERVO_H
#ifndef __SERVO_H
#define __SERVO_H
void Servo_Init(void);
void Servo_SetAngle(float Angle);
#endif
void Servo_Init(void);
void Servo_SetAngle(float Angle);
#endif
__SERVO_H
#define __SERVO_H
void Servo_Init(void);
void Servo_SetAngle(float Angle);
#endif
循迹.c
#include "xunji.h"
#include "stm32f10x.h" // Device header
void xunji_config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB, ENABLE); // ??PC????
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4 | GPIO_Pin_7; //???????
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//??GPIO??,????
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure); //???PC??
}
循迹.h
#ifndef __XUNJI_H
#define __XUNJI_H
void xunji_config(void);
#endif
蓝牙.c
#include "stm32f10x.h" // Device header
void HC_05_Init(void)
{
//ÀûÓÃÖжϽøÐÐÀ¶ÑÀµÄÊÕ·¢
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); //ʹÄÜUSART1£¬GPIOAʱÖÓ
// USART_DeInit(USART1); //¸´Î»´®¿Ú1
// USART1_TX PA.9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //¸´ÓÃÍÆÍìÊä³ö
GPIO_Init(GPIOA, &GPIO_InitStructure); //³õʼ»¯PA9
//USART1_RX PA.10
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//¸¡¿ÕÊäÈë
GPIO_Init(GPIOA, &GPIO_InitStructure); //³õʼ»¯PA10
/* USARTx configured as follow:
- BaudRate = 9600 baud ²¨ÌØÂÊ
- Word Length = 8 Bits Êý¾Ý³¤¶È
- One Stop Bit ֹͣλ
- No parity УÑ鷽ʽ
- Hardware flow control disabled (RTS and CTS signals) Ó²¼þ¿ØÖÆÁ÷
- Receive and transmit enabled ʹÄÜ·¢ËͺͽÓÊÕ
*/
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART1, &USART_InitStructure);
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//¿ªÆôÖжÏ
//Usart1 NVIC ÅäÖÃ
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//ÇÀÕ¼ÓÅÏȼ¶3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //×ÓÓÅÏȼ¶3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQͨµÀʹÄÜ
NVIC_Init(&NVIC_InitStructure); //¸ù¾ÝÖ¸¶¨µÄ²ÎÊý³õʼ»¯VIC¼Ä´æÆ÷
USART_Cmd(USART1, ENABLE);
}
蓝牙.h
#ifndef __HC_05_H__
#define __HC_05_H__
void HC_05_Init(void);
#endif


















 7105
7105

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











