







在 “项目 ”章节中,我会暂时停止向你灌输新的理论,而是让我们一起完成一个程序。学习编程,理论是必要的,但阅读和理解实际程序同样重要。
本章的课题是建立一个自动机,一个在虚拟世界中执行任务的小程序。我们的自动机将是一个收发包裹的机器人。
梅多菲尔德
梅多菲尔德村并不大。它由 11 个地方组成,中间有 14 条路。可以用这样的道路阵列来描述它:
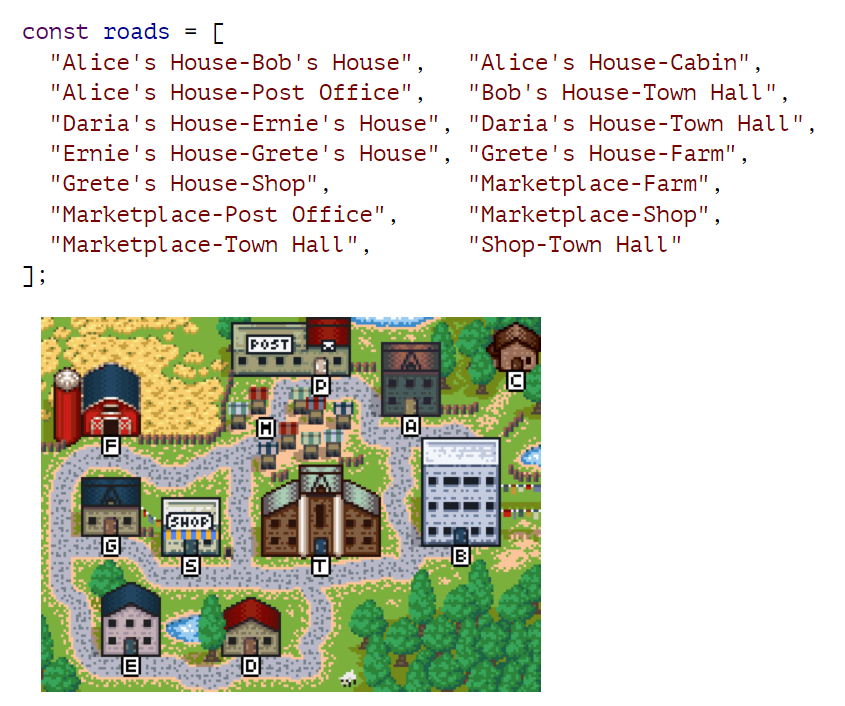
村里的道路网构成了一幅图。图是点(村庄中的地点)与线(道路)的集合。这个图将是我们的机器人移动的世界。
字符串数组并不容易处理。我们感兴趣的是从给定地点可以到达的目的地。让我们把道路列表转换成一个数据结构,告诉我们每个地点可以到达的目的地。
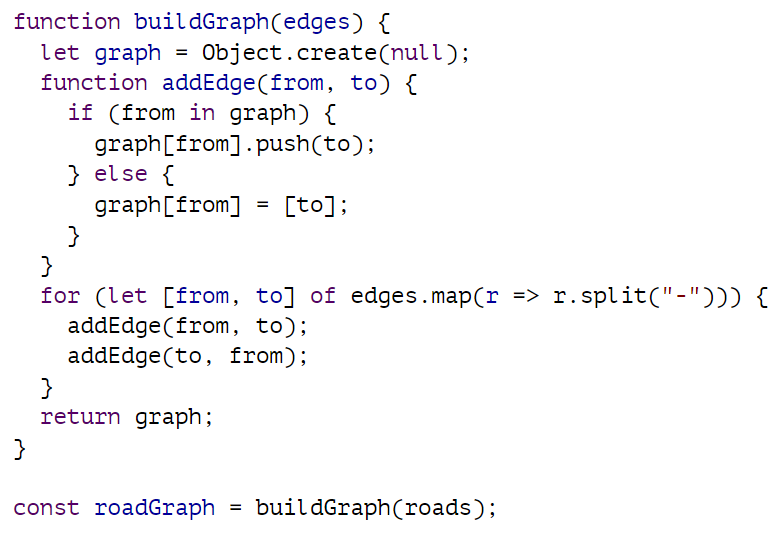
给定一个边数组后,buildGraph 会创建一个 map 对象,为每个节点存储一个连接节点数组。它使用 split 方法将道路字符串(其形式为 “Start-End”)转换为包含开始和结束的双元素数组,作为单独的字符串。
任务
我们的机器人将在村子里移动。在不同的地方都有包裹,每个包裹都寄往其他地方。机器人遇到包裹就捡起来,到达目的地后再送出去。
每到一处,自动机都必须决定下一步去哪里。当所有包裹都送完时,它就完成了任务。
为了能够模拟这一过程,我们必须定义一个能够描述这一过程的虚拟世界。这个模型会告诉我们机器人在哪里,包裹在哪里。当机器人决定移动到某个地方时,我们需要更新模型,以反映新的情况。
如果你采用面向对象编程的思维方式,你的第一反应可能是开始为世界中的各种元素定义对象:一个机器人类,一个包裹类,也许还有一个地点类。这些对象可以持有描述其当前状态的属性,例如某个地点的包裹堆,我们可以在更新世界时改变这些属性。
这是错误的。至少通常是这样。听起来像对象的东西并不自动意味着它在程序中就应该是对象。为应用程序中的每一个概念都编写类的做法,往往会使你的程序成为一个相互关联的对象集合,而每个对象都有自己的内部变化状态。这样的程序往往难以理解,因此很容易被破解。
取而代之的是,让我们把村子的状态浓缩为定义它的一组最小值。这里有机器人的当前位置和未交付包裹的集合,每个包裹都有一个当前位置和目的地地址。就是这样。
同时,让我们在机器人移动时不改变这个状态,而是为移动后的情况计算一个新的状态。
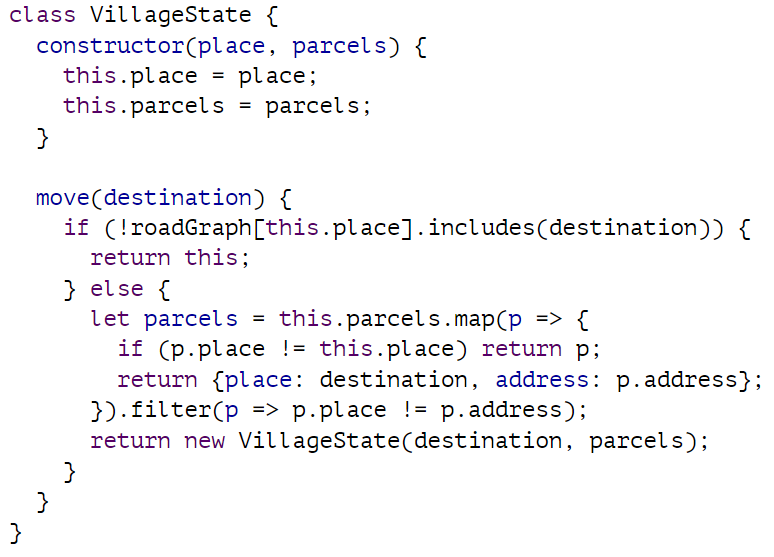
移动方法是进行操作的地方。它首先会检查是否有一条路可以从当前位置通往目的地,如果没有,就会返回旧的状态,因为这不是一个有效的移动。
接下来,该方法会创建一个新状态,将目的地作为机器人的新位置。它还需要创建一组新的包裹--机器人携带的包裹(在机器人当前位置)需要被移动到新位置。此外,还需要交付寄往新地点的包裹,也就是说,需要将它们从未曾交付的包裹中移除。地图调用负责移动,过滤调用负责递送。
包裹对象在移动时不会改变,而是会重新创建。移动方法为我们提供了一个新的村庄状态,但旧的状
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









