







在写频率与补偿的时候,需思考良多,考虑到其复杂性,涉及反馈及其频率特性; 分为几个部分阐述,该章节为频率与补偿(上),理论的简单说明、零极点相对位置的估计、系统的零极点发生的情况,以及常用的补偿电路解析。让我们还是从频率开始,渗透到补偿,最终以例子结尾。
该章节主要包括了极点与结点关联,巴克豪森判据,稳定性与非稳定性系统波特图,单端输出Cascade OTA零极点分析及其补偿,攫取多方资源,配合自己的感悟作讲解。
有以下几点:
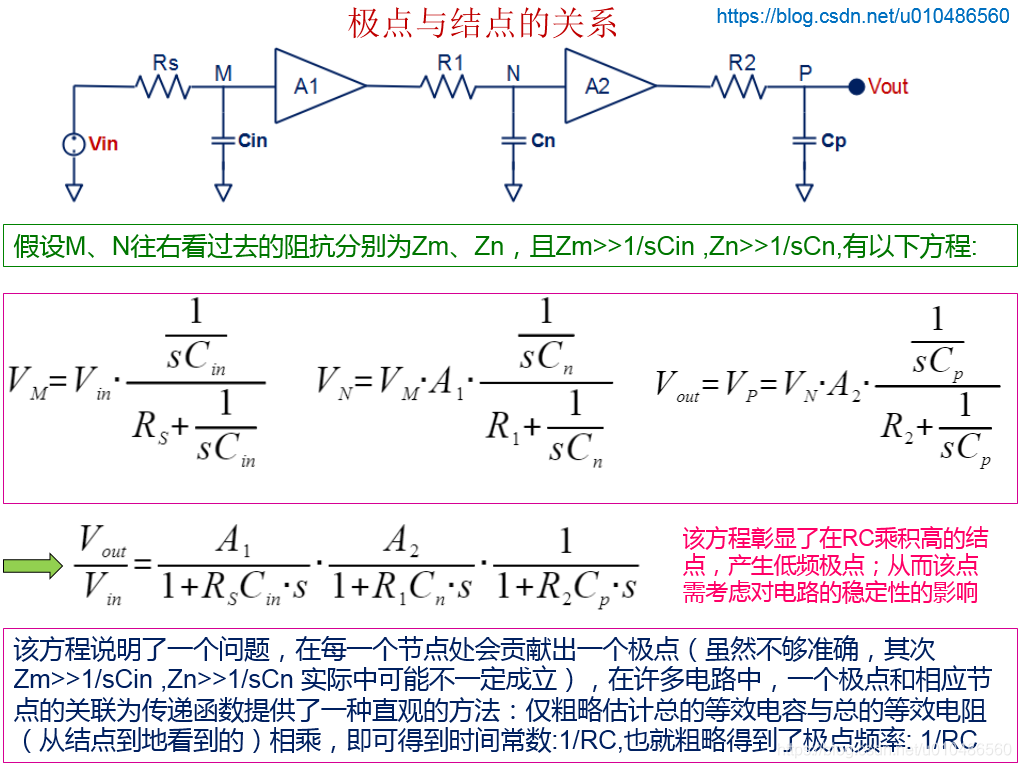
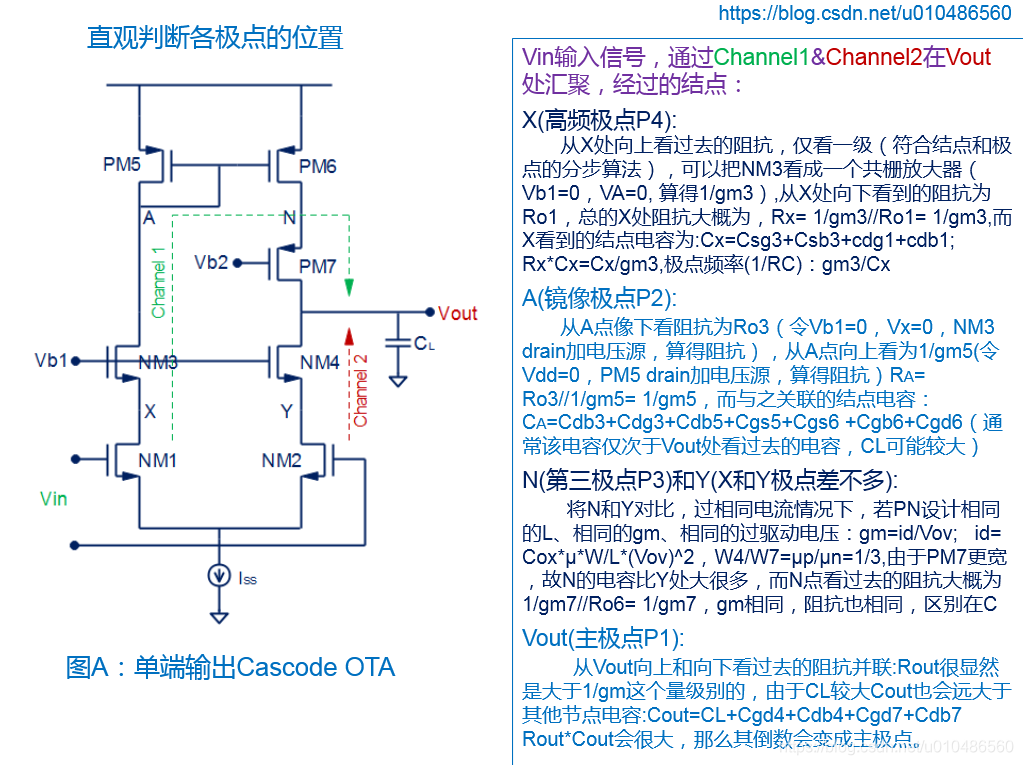
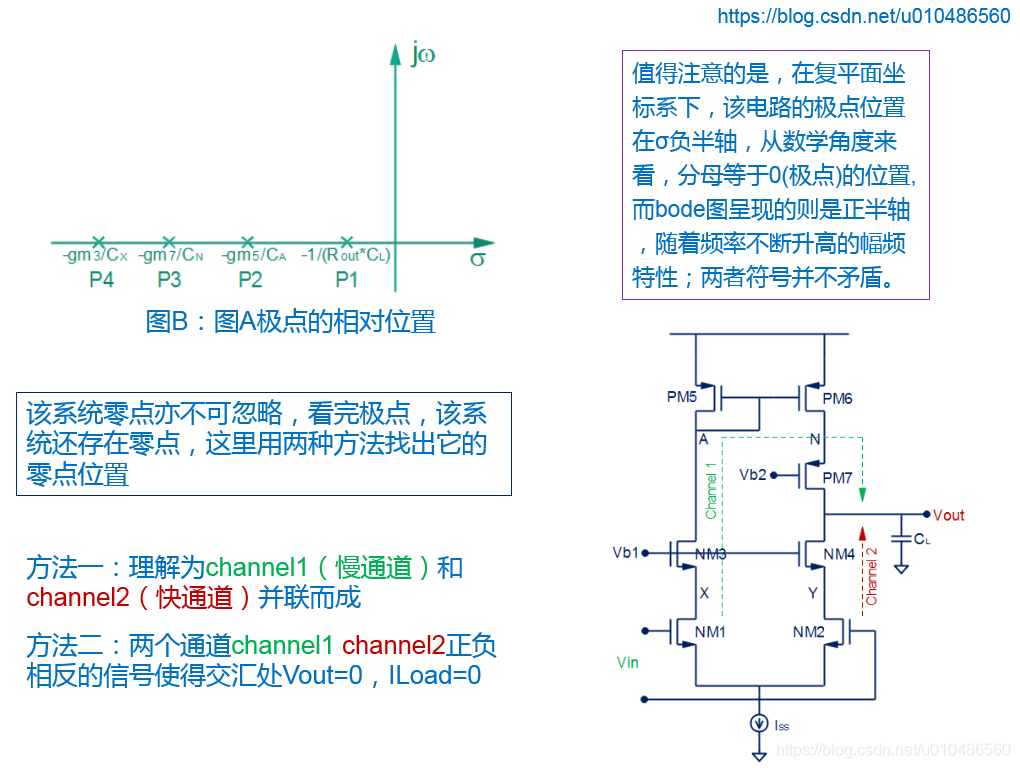
在电路的每一个节点处会贡献出一个极点,在多数电路中,一个极点和相应节点的关联为传递函数提供了一种直观的方法:仅粗略估计总的等效电容与总的等效电阻(从结点到地看到的)相乘即可得到极点位置。但可能丢失零点,结果不够精确。
在RC乘积高的结点,产生低频极点;从而该点需考虑对电路的稳定性的影响。
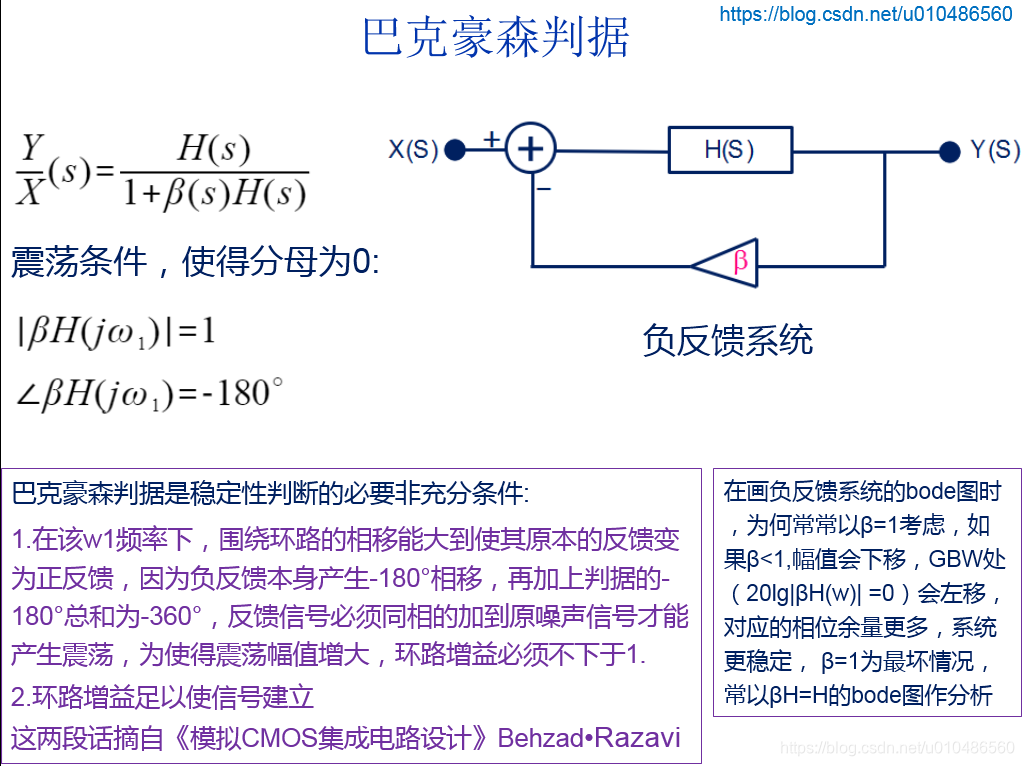
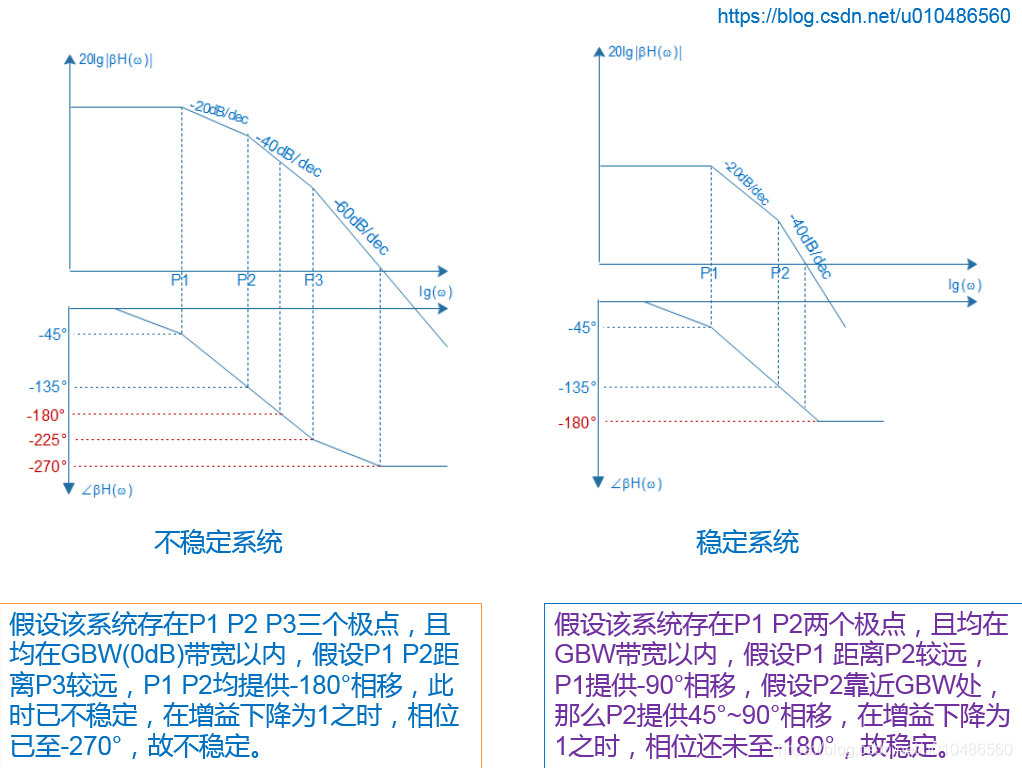
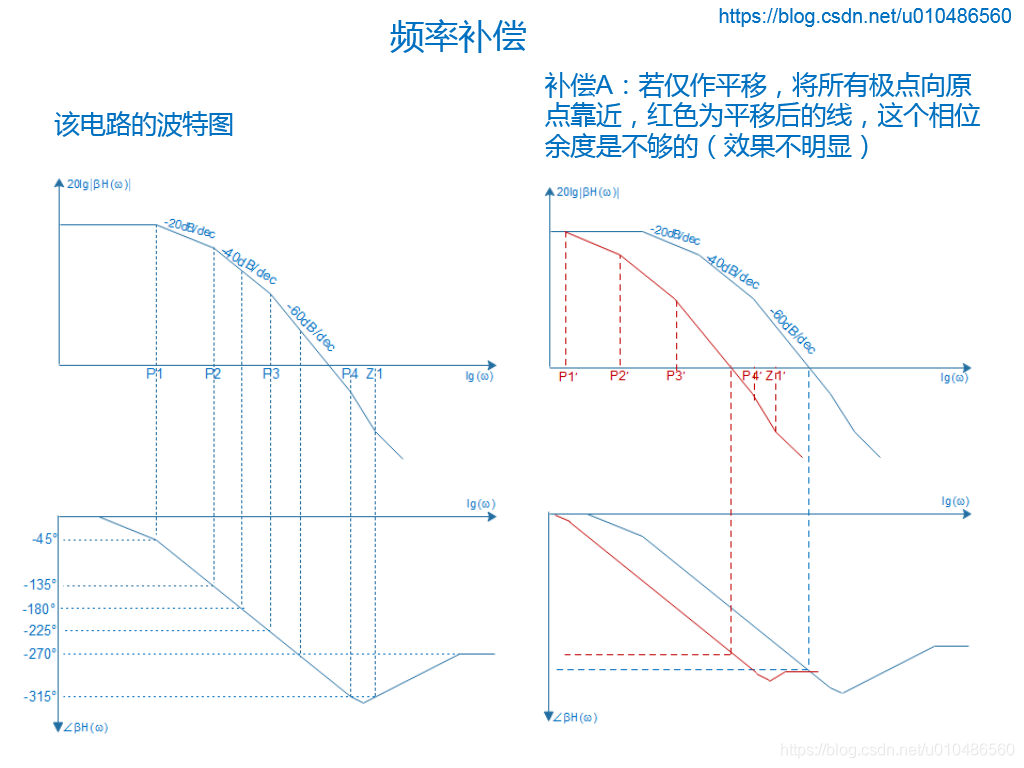
在画负反馈系统的bode图时,为何常常以β=1考虑,如果β<1,幅值会下移,GBW处(20lg|βH(w)| =0)会左移,对应的相位余量更多,系统更稳定, β=1为最坏情况,常以βH=H的bode图作分析
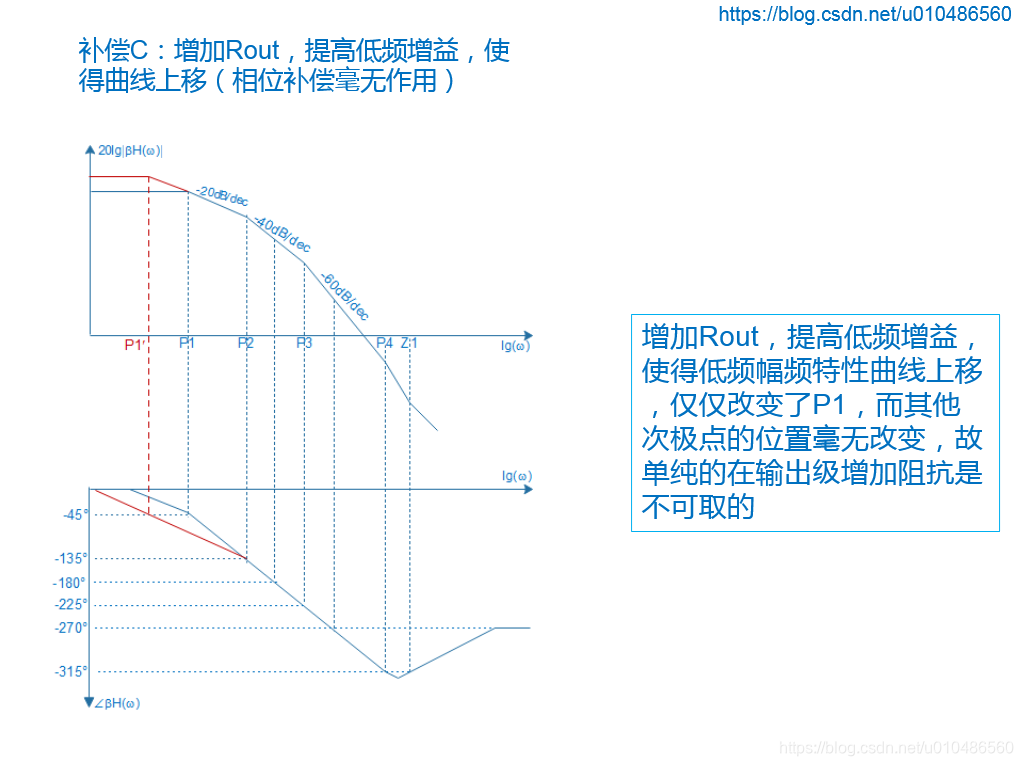
增加输出阻抗,提高低频增益,使得低频幅频特性曲线上移,仅仅改变了主极点位置,而其他次极点的位置毫无改变,故单纯的在输出级增加阻抗是不可取的。



















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











