







 本文介绍了评估图像显著性检测算法的多种评价指标,包括眼注视点检测任务的ROC、AUC等,以及显著目标检测任务的MAE、Fb等指标,详细解释了这些指标的含义及如何反映算法性能。
本文介绍了评估图像显著性检测算法的多种评价指标,包括眼注视点检测任务的ROC、AUC等,以及显著目标检测任务的MAE、Fb等指标,详细解释了这些指标的含义及如何反映算法性能。
图像显著性检测算法的评价指标介绍
要评价一个图像显著性检测(Saliency Detection,SD)算法的好坏,当然离不开评价指标(Metric),显著性检测分为眼注视点显著性(eye fixation saliency)和显著目标检测(salient object detection)两种不同类型的任务。
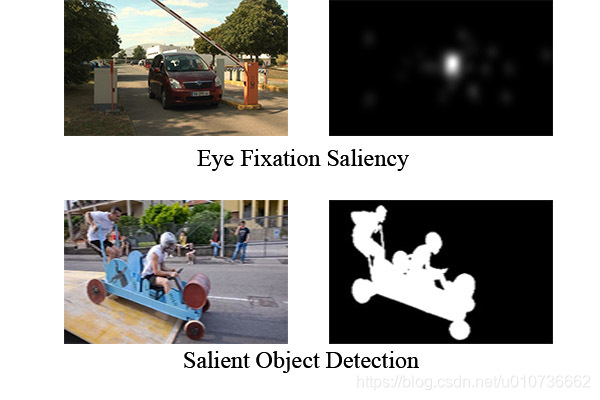
对于眼注视点检测任务来说,它主要是检测人眼关注点的位置,常用的评价指标有:
- ROC (Receiver Operating Characteristic curve)
- AUC (Area Under Curve)
- sAUC (shuffled AUC)
- CC (Pearsons Linear Correlation Coefficient)
- NSS (Normalized Scanpath Saliency)
- KLDiv (Kullback-Leibler Divergence )
ROC 曲线又称受试者受试者工作特征曲线,以假正例率(False Positive Rate, FPR)为横轴,真正例率(True Positive Rate, TPR)为纵轴所组成的坐标图,以0~255不同的阈值对预测的眼注视点显著图分类描点,从而绘制成曲线图。从直观上看,曲线越接近左上角,说明该算法检测性能越好;曲线下面积称之为AUC, AUC越大说明算法检测性能越好。由于AUC会受中心偏差(center bias)的影响,研究者又提出更加鲁棒的sAUC评价指标。
CC是指皮尔逊相关系数,用来评价预测的眼关注点显著图和参考图ground truth之间的线性相关性,CC越大说明该模型性能越好;NSS是指标准化扫描路径显着性,用来评价两者之间的差异值,NSS越大说明模型性能越好;KLDiv是指KL散度,KLDiv越小说明该模型检测性能越好。
对于显著目标检测任务来说,它主要是检测出受人眼注意的显著性的目标区域,比如猫狗,车辆,行人等等,有点类似object segmentation。常用的评价指标有:
- ROC (Receiver Operating Characteristic curve)
- AUC (Area Under Curve)
- MAE (Mean Absolute Error)
- Fb
- MAP (Mean Average Precision)
- MAR (Mean Average Recall)
上述评价指标中,ROC与AUC类似于眼注视点任务,都是用不同的阈值来确定描点位置,然后将所有点连接起构成ROC曲线;MAE是指平均绝对值误差,用于评价预测的显著图和参考图之间的差异,MAE越小说明该算法性能越好;Fb是根据precision和recall计算的,Fb越大说明算法性能越好;MAP是指平均精度率,MAR是指平均召回率,MAR和MAP越大说明算法性能越好。
后续
这篇文章是对显著性检测算法的评价指标做一个简单的梳理,后面我会持续更新各种指标的详细解释和实现代码,敬请关注。
图像显著性检测论文代码汇总整理,请移步到以下链接:
https://blog.csdn.net/u010736662/article/details/88930849


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











