






BootLoader
关于Bootloader,从书上的文字描述,很难理解这个名词是什么,有什么用。这次用到了,算是有了更进一步的认识。
一、知识点
- 1、BootLoader就是单片机启动时候运行的一段小程序,这段程序负责单片机固件的更新,也就是单片机选择性的自己给自己下程序。可以更新,也可以不更新,更新的话,BootLoader更新完程序后,跳转到新程序运行;不更新的话,BootLoader直接跳转到原来的程序去运行。
- 2、BootLoader更新完程序后并不擦除自己,下次启动后依然先运行BootLoader程序,又可以选择性的更新或者不更新程序,所以BootLoader就是用来管理单片机程序的更新。
- 3、在实际的单片机工程项目中,如果加入了BootLoader功能,就可以给单片机日后升级程序留出一个接口,方便日后单片机程序更新。当然,这就需要创建两个工程项目,一个为BootLoader工程,一个为APP工程。
- 4、BootLoader工程生成的.hex或者.bin文件通常下载到ROM或Flash中的首地址,这样可以保证上电后先运行BootLoader程序。而APP工程生成的.hex或者.bin文件则下载到ROM或Flash中BootLoader后面的地址中。也就是说,存在ROM/Flash中的内容是分为两部分的。
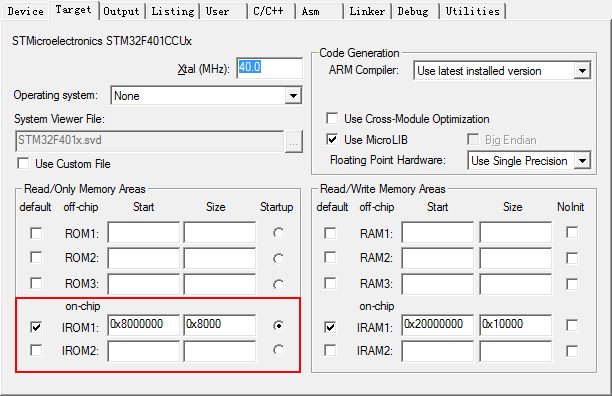
- 5、要实现在同一个ROM/Flash中保存两段程序,并且保证不能相互覆盖,则需要在下载程序时指定地址。如在Keil下,可以进行如下的调整。
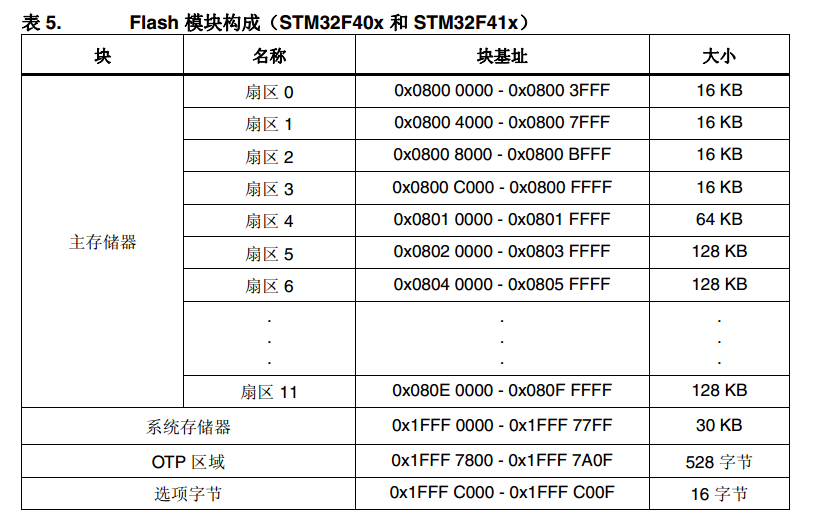
- 6、实际上,在STM32系列的单片机中,Flash本身就是分扇区的,一个扇区16KB的样子,具体可以查看手册。那么就可以用从第一个扇区的首地址开始下载BootLoader的程序,而从第二个扇区的起始地址开始下载APP程序。如下为STM32F4系列芯片的Flash模块。
- 7、单片机上电之后开始执行BootLoader程序,这时单片机会检测用户是否有升级应用程序(APP)的请求,具体表现有很多种,例如检测内存卡,Nand Flash中是否包含升级文件,串口/I2C/SPI等外设接口是否传来升级文件,还有使用GSM来升级的。
- 8、所谓的升级,就是将ROM/Flash中存储APP程序的扇区内容擦除并写入新文件。例如一次固件升级的过程可以是:1、单片机上电执行BootLoader,2、BootLoader查找升级文件,3、若找到文件,擦除Flash中的部分扇区(存APP的),4、在擦除的扇区写入升级的文件,5、写入完成,读取数据检验是否出错,6、若数据一致,升级成功,删除升级文件,7、BootLoader程序跳转到APP程序执行。删除升级文件是为了下次上电后不再进行升级。
- 9、所谓的跳转,可以理解为改变程序PC指针,指向APP程序扇区的起始地址。
二、部分代码
- 1、主函数
int main(void)
{
HAL_Init();//STM32初始化
SystemClock_Config();//时钟配置
System_GPIOInit();//IO口配置
#ifdef BOOTLOAD_DISPLAY_ENABLE
SystemColorInit();//显示屏配置
#endif
System_LoadUpdateFile();//升级函数
while (1)
{
}
}
- 2、升级函数
void System_LoadUpdateFile(void)
{
uint8_t res;
if(bNandFlash_Error)//如果NandFlash错误,串口打印错误信息,跳转到用户程序
{
d_printf("NandFlash_Error jump\n");
BootLoad_Jump();//跳转函数
return;
}
if(bNo_FileSystem)//如果没有文件系统,串口打印错误信息,跳转到用户程序
{
d_printf("no file system jump\n");
BootLoad_Jump();//跳转函数
return;
}
if(f_open(&File, (char *)UPDATE_FILE_PATH, FA_READ)==FR_OK)//如果存在升级文件,开始执行升级
{
d_printf("update\n");
if(BootLoad_Program())//是否写入成功
{
f_close(&File);//关闭升级文件
res=f_unlink((char *)UPDATE_FILE_PATH);//删除升级文件
d_printfhex(res);d_printf("\n");
res=f_unlink((char *)UPDATE_DIR_PATH);//删除升级目录
d_printfhex(res);d_printf("\n");
BootLoad_Jump();//跳转函数
}
else
{
HAL_FLASH_Lock();//锁定Flash
d_printf("update fail\n");
f_close(&File);//关闭升级文件
BootLoad_Jump();//跳转函数
}
}
else
{
d_printf("jump\n");
f_close(&File);
BootLoad_Jump();
}
}
- 3、重写Flash函数
uint8_t BootLoad_Program(void)
{
uint32_t BaseAddress=APPLICATION_ADDRESS;//APP地址
uint32_t i,br,datacnt=0;
uint8_t data8;
GlobalPtr32=(uint32_t *)BootBuff;
HAL_FLASH_Unlock();//解锁Flash
if(BootLoad_Erase()==false)//擦除Flash
{
return false;
}
d_printf("size:");d_printfhex32(File.fsize);d_printf("\n");
while(1)
{
f_read(&File,BootBuff,8192,(void *)&br);//读取升级文件
for (i=0;i<(br>>2);i++)
{
if (HAL_FLASH_Program(FLASH_TYPEPROGRAM_WORD, BaseAddress, GlobalPtr32[i]) == HAL_OK)//写入升级文件
{
BaseAddress = BaseAddress +4;
}
else
{
d_printf("program err\n");
return false;
}
}
datacnt+=br;
if(datacnt>=File.fsize)//写入完成
{
break;
}
}
d_printf("verify\n"); //验证Flash中的内容与升级文件是否一致
f_lseek(&File,0); //若一致代表升级成功
datacnt=0; //若不一致代表升级失败
BaseAddress=APPLICATION_ADDRESS;
while(1)
{
f_read(&File,BootBuff,8192,(void *)&br);
for (i=0;i<br;i++)
{
data8 = *(__IO uint8_t*)BaseAddress;
if (data8 != BootBuff[i])
{
d_printf("error!\n");
return false;
}
BaseAddress ++;
}
datacnt+=br;
if(datacnt>=File.fsize)
{
break;
}
}
HAL_FLASH_Lock();//锁定Flash
return true;
}
- 4、跳转函数(从BootLoader中跳转到APP的main函数)
void BootLoad_Jump(void)
{
/* Check Vector Table: Test if user code is programmed starting from address
"APPLICATION_ADDRESS" */
d_printfhex32((*(__IO uint32_t*)APPLICATION_ADDRESS));d_printf("\n");
if (((*(__IO uint32_t*)APPLICATION_ADDRESS) & 0x2FFE0000 ) == 0x20000000)
{
JumpAddress = *(__IO uint32_t*) (APPLICATION_ADDRESS +4);
d_printfhex32(JumpAddress);d_printf("\n");
HAL_Delay(100);
Jump_To_Application = (pFunction) JumpAddress;
/* Initialize user application's Stack Pointer */
__set_MSP(*(__IO uint32_t*) APPLICATION_ADDRESS);
Jump_To_Application();
}
}















 1741
1741

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









