







在我们的程序中,数据结构还有变量等等都需要占有内存,在很多系统中,它都要求内存分配的时候要对齐,这样做的好处就是可以提高访问内存的速度。
我们还是先来看一段简单的程序:
程序一
1 #include <iostream>
2 using namespace std;
3
4 struct X1
5 {
6 int i;//4个字节
7 char c1;//1个字节
8 char c2;//1个字节
9 };
10
11 struct X2
12 {
13 char c1;//1个字节
14 int i;//4个字节
15 char c2;//1个字节
16 };
17
18 struct X3
19 {
20 char c1;//1个字节
21 char c2;//1个字节
22 int i;//4个字节
23 };
24 int main()
25 {
26 cout<<"long "<<sizeof(long)<<"\n";
27 cout<<"float "<<sizeof(float)<<"\n";
28 cout<<"int "<<sizeof(int)<<"\n";
29 cout<<"char "<<sizeof(char)<<"\n";
30
31 X1 x1;
32 X2 x2;
33 X3 x3;
34 cout<<"x1 的大小 "<<sizeof(x1)<<"\n";
35 cout<<"x2 的大小 "<<sizeof(x2)<<"\n";
36 cout<<"x3 的大小 "<<sizeof(x3)<<"\n";
37 return 0;
38 }
这段程序的功能很简单,就是定义了三个结构X1,X2,X3,这三个结构的主要区别就是内存数据摆放的顺序,其他都是一样的,另外程序输入了几种基本类型所占用的字节数,以及我们这里的三个结构所占用的字节数。
这段程序的运行结果为:
1 long 4
2 float 4
3 int 4
4 char 1
5 x1 的大小 8
6 x2 的大小 12
7 x3 的大小 8
结果的前面四行没有什么问题,但是我们在最后三行就可以看到三个结构占用的空间大小不一样,造成这个原因就是内部数据的摆放顺序,怎么会这样呢?
下面就是我们需要讲的内存对齐了。
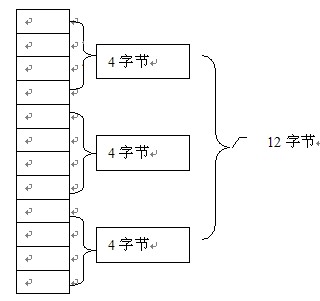
内存是一个连续的块,我们可以用下面的图来表示, 它是以4个字节对一个对齐单位的:
图一
让我们看看三个结构在内存中的布局:
首先是 X1,如下图所示
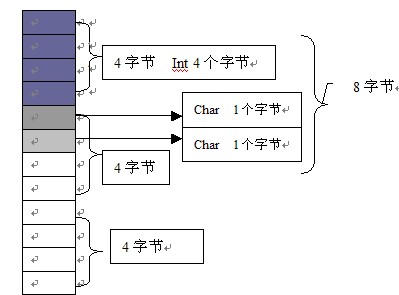
X1 中第一个是 Int类型,它占有4字节,所以前面4格就是满了,然后第二个是char类型,这中类型只占一个字节,所以它占有了第二个4字节组块中的第一格,第三个也是char类型,所以它也占用一个字节,它就排在了第二个组块的第二格,因为它们加在一起大小也不超过一个块,所以他们三个变量在内存中的结构就是这样的,因为有内存分块对齐,所以最后出来的结果是8,而不是6,因为后面两个格子其实也算是被用了。
再次看看X2,如图所示
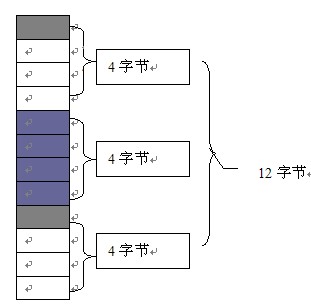
X2中第一个类型是Char类型,它占用一个字节,所以它首先排在第一组块的第一个格子里面,第二个是Int类型,它占用4个字节,第一组块已经用掉一格,还剩3格,肯定是无法放下第二Int类型的,因为要考虑到对齐,所以不得不把它放到第二个组块,第三个类型是Char类型,跟第一个类似。所因为有内存分块对齐,我们的内存就不是8个格子了,而是12个了。
再看看X3,如下图所示:
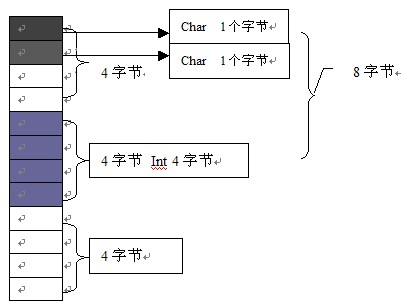
关于X3的说明其实跟X1是类似的,只不过它把两个1个字节的放到了前面,相信看了前面两种情况的说明这里也是很容易理解的















 4028
4028

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









