







 超级会员免费看
超级会员免费看
1. driver
1.1 dts
refer to:
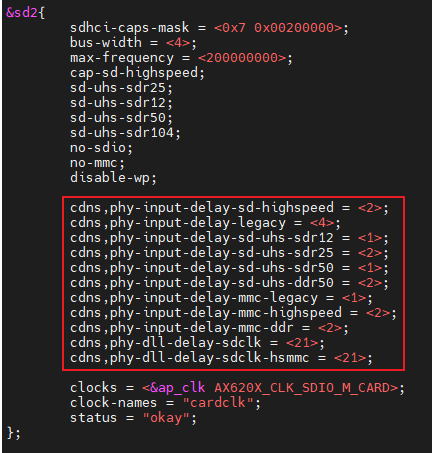
1)sdr104支持tuning,无需手动计算delay
2)input-delay是指输入方向(card -> controller)。由于是controller提供clock给card,write时clock和data相位差固定;但read时,card用的是controller提供的clock,相位不确定,需要计算一个偏移值
3)delay-sdclk:This register controls the delay value on the SDCLK output in the all speed modes except HS200, HS400 and HS400_ES.
4)delay-sdclk-hsmmc: This register controls the delay value on the SDCLK output in the HS200, HS400 and HS400_ES speed modes.
5)不同的speed mode其delay不一样,相同speed mod

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 490
490

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











