







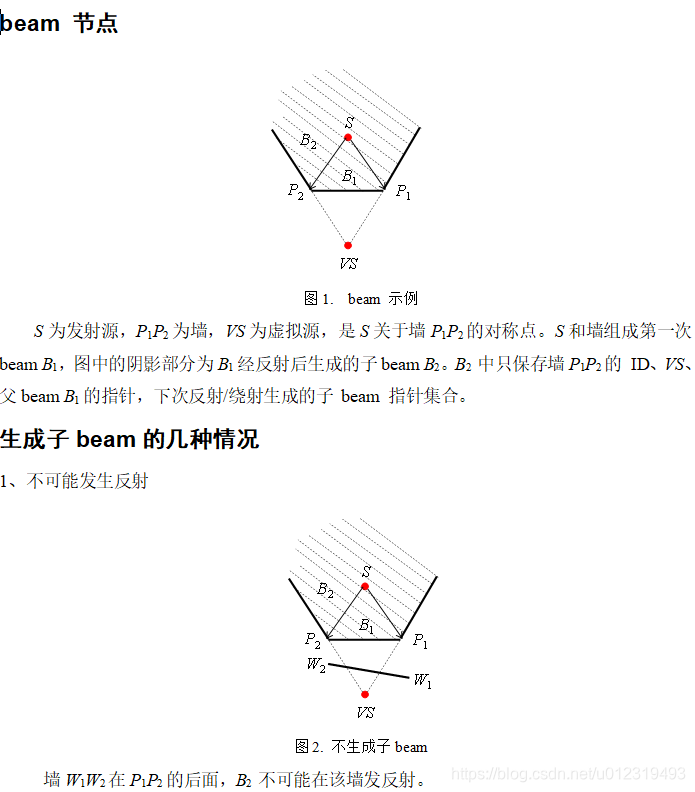
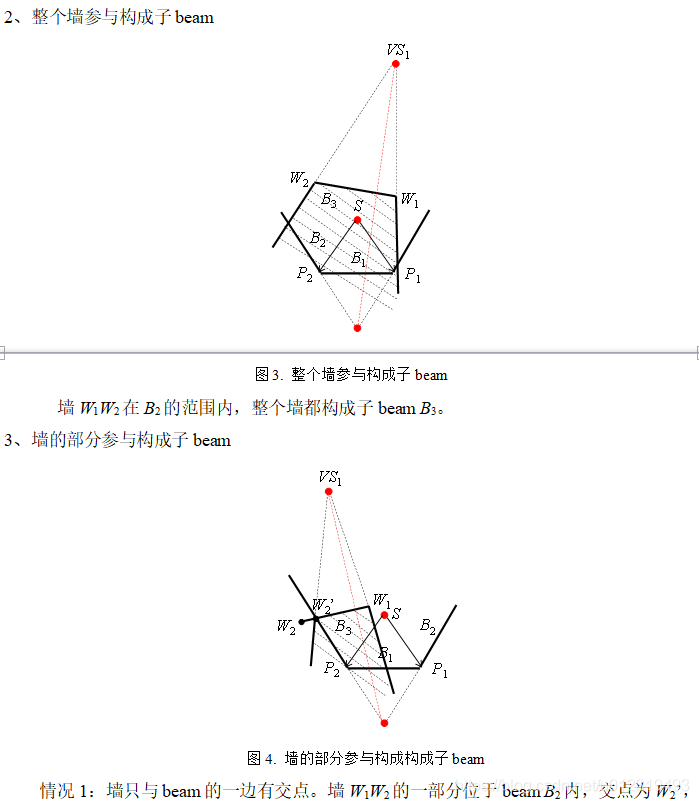
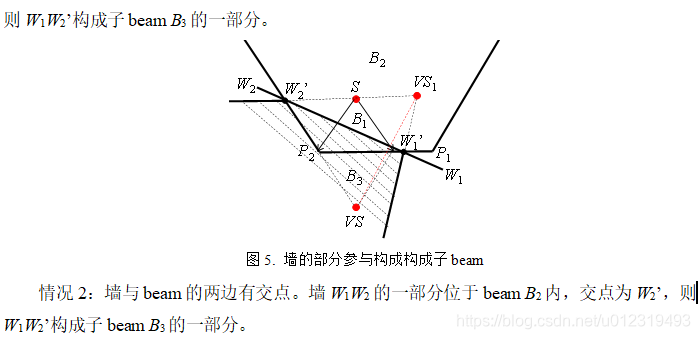
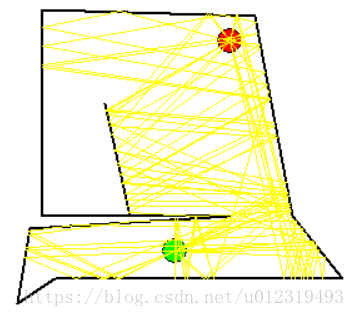
核心:
// 改自:http://blog.kaistale.com/?cat=12
#include <vector>
#include <math.h>
using namespace std;
enum isOnline{OnLine1, OnLine2, OnRay1, OnRay2};
class Point
{
public:
double x, y;
Point(){}
Point(double x1, double y1): x(x1), y(y1){}
Point(const Point &p): x(p.x), y(p.y){}
};
class Line
{
public:
Point p1, p2;
Line(){}
Line(const Point &p11): p1(p11){}
Line(const Point &p11, const Point &p21): p1(p11), p2(p21){}
};
class BSPNode
{
public:
int id; // 墙 id
Point p1, p2; // id墙的两个端点,可能其中一点为墙与分割线的交点
BSPNode *front;
BSPNode *back;
BSPNode()
{
id = -2;
p1 = Point(-1, -1);
p2 = Point(-1, -1);
front = NULL;
back = NULL;
}
BSPNode(int id1): id(id1)
{
p1 = Point(-1, -1);
p2 = Point(-1, -1);
front = NULL;
back = NULL;
}
BSPNode(int id1, const Point &p11, Point &p22): id(id1), p1(p11), p2(p22)
{
front = NULL;
back = NULL;
}
};
class Beam
{
public:
Point vs; // 虚拟源
Point p1, p2;
Beam(){}
Beam(const Beam &b): vs(b.vs), p1(b.p1), p2(b.p2){}
Beam(const Point &vs1, const Point &p11, const Point &p21): vs(vs1), p1(p11), p2(p21){}
};
class BeamNode
{
public:
int id;
Point vs;
BeamNode *parent;
vector<BeamNode *> children;
BeamNode(){}
BeamNode(int id1): id(id1){}
BeamNode(int id1, BeamNode *parent1, Point vs1): id(id1), parent(parent1), vs(vs1){}
};
class BeamTrace
{
public:
Point listener;
Point source;
vector<Line> walls;
BSPNode *bspNode;
BeamNode *beamNode;
// 返回两条线的交点。
// https://blog.csdn.net/wcl0617/article/details/78654944
Point lineIntersection(double x11, double y11, double x12, double y12, double x21, double y21, double x22, double y22, bool flag[4])
{
double denominator = ((y22 - y21) * (x12 - x11)) - ((x22 - x21) * (y12 - y11));
if (fabs(denominator) < 0.0001)
{
return Point(-1, -1);
}
double a = y11 - y21;
double b = x11 - x21;
double numerator1 = ((x22 - x21) * a) - ((y22 - y21) * b);
double numerator2 = ((x12 - x11) * a) - ((y12 - y11) * b);
a = numerator1 / denominator;
b = numerator2 / denominator;
Point result(-1, -1);
result.x = x11 + (a * (x12 - x11));
result.y = y11 + (a * (y12 - y11));
if (a > 0)
{
flag[OnRay1] = true;
if(a < 1)
{
flag[OnLine1] = true;
}
}
if(b > 0)
{
flag[OnRay2] = true;
if(b < 1)
{
flag[OnLine2] = true;
}
}
return result;
}
// 返回true,如果p0 在线段p1--p2的前面
bool inFrontOf(Point p0, Point p1, Point p2)
{
Point n1(-(p2.y - p1.y), p2.x - p1.x);
return n1.x * (p0.x - p1.x) + n1.y * (p0.y - p1.y) > 0;
}
// 返回p0关于p1--p2的镜像
Point pointMirror(Point p0, Point p1, Point p2)
{
Point n1 = Point(-(p2.y - p1.y), p2.x - p1.x);
double n1_len = sqrt(n1.x * n1.x + n1.y * n1.y);
n1 = Point(n1.x / n1_len, n1.y / n1_len);
double dist = 2 * (n1.x * (p0.x - p1.x) + n1.y * (p0.y - p1.y));
return Point(p0.x - n1.x * dist, p0.y - n1.y * dist);
}
// 检查w2中的点是否在w1的前面,不是的话,返回分割w2后的结果
int BSPDivide(BSPNode *w1, BSPNode *w2, Point &p11, Point &p12, Point &p21, Point &p22)
{
bool w2_nx = inFrontOf(w2->p1, w1->p1, w1->p2);
bool w2_ny = inFrontOf(w2->p2, w1->p1, w1->p2);
if(w2_nx && w2_ny)
{
return 1; // w2 在 w1 的前面
}
if(!w2_nx && !w2_ny)
{
return -1; // w2 在 w1 的后面
}
bool flag[4];
memset(flag, false, sizeof(flag));
Point p3 = lineIntersection(w1->p1.x, w1->p1.y, w1->p2.x, w1->p2.y, w2->p1.x, w2->p1.y, w2->p2.x, w2->p2.y, flag);
if(w2_nx)
{
// w2.p1 在 w1 的前面,w2.p2 在 w2 的后面
p11 = w2->p1;
p12 = p3;
p21 = p3;
p22 = w2->p2;
}
else
{
// w2.p1 在 w1 的后面,w2.p2 在 w2 的前面
p11 = p3;
p12 = w2->p2;
p21 = w2->p1;
p22 = p3;
}
return 0;
}
// 创建BSP树
BSPNode* BSPBuilder(vector<BSPNode *> &recursiveArray)
{
if(recursiveArray.size() == 0)
return NULL;
if(recursiveArray.size() == 1)
return recursiveArray[0];
vector<BSPNode *> frontList;
vector<BSPNode *> backList;
while(recursiveArray.size() > 1)
{
BSPNode *node = recursiveArray.back();
recursiveArray.pop_back();
Point p11, p12, p21, p22;
int retval = BSPDivide(recursiveArray[0], node, p11, p12, p21, p22);
if(retval == 1)
{
frontList.push_back(node);
}
else if(retval == -1)
{
backList.push_back(node);
}
else
{
frontList.push_back(new BSPNode(node->id, p11, p12));
backList.push_back(new BSPNode(node->id, p21, p22));
}
}
recursiveArray[0]->front = BSPBuilder(frontList);
recursiveArray[0]->back = BSPBuilder(backList);
return recursiveArray[0];
}
// 构建 BSP 树
BSPNode* BSPTree(vector<Line> &walls)
{
vector<BSPNode *> recursiveArray;
for(int i=0; i<walls.size(); i++)
recursiveArray.push_back(new BSPNode(i, walls[i].p1, walls[i].p2));
bspNode = BSPBuilder(recursiveArray);
return bspNode;
}
// 根据给定beam,创建反射beams。
void beamBuild(Beam *beam, BeamNode *node, const vector<Line> &walls, int order, int MAX_ORDER)
{
if(order > MAX_ORDER)
return;
// 使得虚拟源位于墙的后面
if(inFrontOf(beam->vs, beam->p1, beam->p2))
{
Point temp = beam->p2;
beam->p2 = beam->p1;
beam->p1 = temp;
}
bool flag[4];
for(int i=0; i<walls.size(); i++)
{
if(node->id == i)
continue;
// A、B(inside)、C 三条线段
// A\___/C
// B
// <source>
bool p1_b = !inFrontOf(walls[i].p1, beam->p1, beam->p2);
bool p2_b = !inFrontOf(walls[i].p2, beam->p1, beam->p2);
if(p1_b && p2_b) // 墙位于beam的外面,不可能发生反射
continue;
bool p1_a = !inFrontOf(walls[i].p1, beam->vs, beam->p2);
bool p2_a = !inFrontOf(walls[i].p2, beam->vs, beam->p2);
if(p1_a && p2_a)
continue;
bool p1_c = inFrontOf(walls[i].p1, beam->vs, beam->p1);
bool p2_c = inFrontOf(walls[i].p2, beam->vs, beam->p1);
if(p1_c && p2_c)
continue;
// 可能发生反射
bool p1_in = !p1_a && !p1_b && !p1_c;
bool p2_in = !p2_a && !p2_b && !p2_c;
bool A = false;
bool B = false;
bool C = false;
Line new_line(Point(-1, -1), Point(-1, -1));
if(p1_in && p2_in) // 整个墙都在beam内,可构成反射beam的一部分
{
new_line = Line(walls[i].p1, walls[i].p2);
}
else if(p1_in) // p1在beam内,p2在beam外
{
new_line.p1 = walls[i].p1;
if(p2_a && !p2_b) // 与线段A相交
{
A = true;
}
else if(p2_a && p2_b && p2_c) // 可能与线段A或B或C相交
{
A = true;
B = true;
C = true;
}
else if(p2_a && p2_b) // 可能与线段A或B相交
{
A = true;
B = true;
}
else if(!p2_a && p2_b && !p2_c)
{
B = true;
}
else if(p2_c && p2_b)
{
B = true;
C = true;
}
else if(p2_c && !p2_b)
{
C = true;
}
}
else if(p2_in) // p2在beam内,p1在beam外
{
new_line.p1 = walls[i].p2;
if(p1_a && !p1_b)
{
A = true;
}
else if(p1_a && p1_b && p1_c)
{
A = true;
B = true;
C = true;
}
else if(p1_a && p1_b)
{
A = true;
B = true;
}
else if(!p1_a && p1_b && !p1_c)
{
B = true;
}
else if(p1_c && p1_b)
{
B = true;
C = true;
}
else if(p1_c && !p1_b)
{
C = true;
}
}
else // 所有的交点都在边界外,可能有2个交点,也可能没有交点
{
if(p1_a && p2_b || p2_a && p1_b) // 与线段A或B相交
{
memset(flag, false, sizeof(flag));
Point int_a = lineIntersection(beam->p2.x, beam->p2.y, beam->p2.x+(beam->p2.x-beam->vs.x)*2, beam->p2.y+(beam->p2.y-beam->vs.y)*2, walls[i].p1.x, walls[i].p1.y, walls[i].p2.x, walls[i].p2.y, flag);
if(flag[OnRay1])
{
Point int_b = lineIntersection(beam->p1.x, beam->p1.y, beam->p2.x, beam->p2.y, walls[i].p1.x, walls[i].p1.y, walls[i].p2.x, walls[i].p2.y, flag);
new_line = Line(int_a, int_b);
}
}
else if(p1_b && p2_c || p2_b && p1_c) // 与线段B或C相交
{
memset(flag, false, sizeof(flag));
Point int_b = lineIntersection(beam->p1.x, beam->p1.y, beam->p2.x, beam->p2.y,walls[i].p1.x, walls[i].p1.y,walls[i].p2.x,walls[i].p2.y, flag);
if(flag[OnRay1])
{
Point int_c = lineIntersection(beam->p1.x, beam->p1.y,beam->p1.x+(beam->p1.x-beam->vs.x)*2,beam->p1.y+(beam->p1.y-beam->vs.y)*2, walls[i].p1.x, walls[i].p1.y, walls[i].p2.x, walls[i].p2.y, flag);
new_line = Line(int_b, int_c);
}
}
else if((p1_a && p2_c || p2_a && p1_c) && (!p1_b && !p2_b)) // 与线段A和C相交
{
Point int_a = lineIntersection(beam->p2.x, beam->p2.y, beam->p2.x+(beam->p2.x-beam->vs.x)*2,beam->p2.y+(beam->p2.y-beam->vs.y)*2,walls[i].p1.x,walls[i].p1.y,walls[i].p2.x,walls[i].p2.y, flag);
Point int_c = lineIntersection(beam->p1.x, beam->p1.y, beam->p1.x+(beam->p1.x-beam->vs.x)*2,beam->p1.y+(beam->p1.y-beam->vs.y)*2,walls[i].p1.x,walls[i].p1.y,walls[i].p2.x,walls[i].p2.y, flag);
new_line = Line(int_a, int_c);
}
}
// 以下部分为针对只有一个交点的情况求交点
Point intersection(-1, -1);
// 与线段A相交
memset(flag, false, sizeof(flag));
if(A && !B && !C) // 与线段A相交
intersection = lineIntersection(beam->vs.x, beam->vs.y, beam->p2.x, beam->p2.y, walls[i].p1.x, walls[i].p1.y, walls[i].p2.x, walls[i].p2.y, flag);
else if(A && B && C) // 与线段A或B或C相交
{
memset(flag, false, sizeof(flag));
intersection = lineIntersection(beam->p2.x, beam->p2.y, beam->p2.x+(beam->p2.x-beam->vs.x),beam->p2.y+(beam->p2.y-beam->vs.y),walls[i].p1.x, walls[i].p1.y, walls[i].p2.x, walls[i].p2.y, flag);
if(!flag[OnRay1])
intersection = lineIntersection(beam->p1.x, beam->p1.y, beam->p2.x, beam->p2.y, walls[i].p1.x, walls[i].p1.y, walls[i].p2.x, walls[i].p2.y, flag);
memset(flag, false, sizeof(flag));
if(!flag[OnRay1])
intersection = lineIntersection(beam->p1.x, beam->p1.y, beam->p1.x+(beam->p1.x-beam->vs.x)*2,beam->p1.y+(beam->p1.y-beam->vs.y)*2,walls[i].p1.x,walls[i].p1.y,walls[i].p2.x,walls[i].p2.y, flag);
}
else if(A && B) // 与线段A或B相交
{
memset(flag, false, sizeof(flag));
intersection = lineIntersection(beam->p2.x, beam->p2.y, beam->p2.x+(beam->p2.x-beam->vs.x), beam->p2.y+(beam->p2.y-beam->vs.y),walls[i].p1.x, walls[i].p1.y, walls[i].p2.x, walls[i].p2.y, flag);
if(!flag[OnRay1])
intersection = lineIntersection(beam->p1.x, beam->p1.y, beam->p2.x, beam->p2.y, walls[i].p1.x, walls[i].p1.y, walls[i].p2.x, walls[i].p2.y, flag);
}
else if(!A && B && !C) // 与线段B相交
intersection = lineIntersection(beam->p1.x, beam->p1.y, beam->p2.x, beam->p2.y, walls[i].p1.x, walls[i].p1.y, walls[i].p2.x, walls[i].p2.y, flag);
else if(B && C) // 与线段B或C相交
{
memset(flag, false, sizeof(flag));
intersection = lineIntersection(beam->p1.x, beam->p1.y, beam->p2.x, beam->p2.y, walls[i].p1.x, walls[i].p1.y, walls[i].p2.x, walls[i].p2.y, flag);
if(!flag[OnRay1])
intersection = lineIntersection(beam->p1.x, beam->p1.y, beam->p1.x+(beam->p1.x-beam->vs.x), beam->p1.y+(beam->p1.y-beam->vs.y), walls[i].p1.x, walls[i].p1.y, walls[i].p2.x, walls[i].p2.y, flag);
}
else if(!A && !B && C) // 与线段C相交
intersection = lineIntersection(beam->vs.x, beam->vs.y, beam->p1.x, beam->p1.y, walls[i].p1.x, walls[i].p1.y, walls[i].p2.x, walls[i].p2.y, flag);
if(intersection.x != -1)
{
new_line.p2 = intersection;
}
// 递归
if(new_line.p2.x != -1)
{
Beam *new_beam = new Beam(pointMirror(beam->vs, walls[i].p1, walls[i].p2), new_line.p1, new_line.p2);
node->children.push_back(new BeamNode(i, node, new_beam->vs));
beamBuild(new_beam, node->children[node->children.size() - 1], walls, order + 1, MAX_ORDER);
}
}
}
// 构造beam树
BeamNode* BeamTree(const Point &source, vector<Line> walls, int MAX_ORDER)
{
beamNode = new BeamNode(-1, NULL, source); // 墙的 id 为-1,说明源是真实的源
// beams 位于叶子节点
vector<Beam*> beams;
for(int i = 0; i < walls.size(); i++)
{
Point vs = pointMirror(source, walls[i].p1, walls[i].p2);
Beam *newBeam = new Beam(vs, walls[i].p1, walls[i].p2);
beams.push_back(newBeam);
beamNode->children.push_back(new BeamNode(i, beamNode, vs)); // 构造第一代 beams (第一批叶子)
// 递归构造子 beam
int order = 0;
beamBuild(beams[beams.size() - 1], beamNode->children[beamNode->children.size() - 1], walls, order, MAX_ORDER);
}
return beamNode;
}
/* 射线追踪 */
// 返回与 id 为 valid_id 的墙的交点,射线的方向为 p1 到 p2
Point rayTrace(Point p1, Point p2, BSPNode *bsp_node, int ignore_id, int valid_id, int order, int &wallID, bool flag[4])
{
if(!bsp_node)
return Point(-1, -1); // 到达 BSP 树的底部
Point inte(-1, -1);
// 射线跟踪利用了 bsp 树从前到后的顺序
if(inFrontOf(p1, bsp_node->p1, bsp_node->p2)) // p1 在 bsp_node 的前面
{
memset(flag, false, sizeof(flag));
inte = rayTrace(p1, p2, bsp_node->front, ignore_id, valid_id, order, wallID, flag);
if(inte.x == -1 || !flag[OnLine1] || !flag[OnLine2])
{
order++;
// 射线跟踪当前 bsp_node
memset(flag, false, sizeof(flag));
inte = lineIntersection(p1.x, p1.y, p2.x, p2.y, bsp_node->p1.x, bsp_node->p1.y, bsp_node->p2.x, bsp_node->p2.y, flag);
if(bsp_node->id == ignore_id)
inte.x = -1;
if(inte.x != -1)
wallID = bsp_node->id;
}
if(inte.x == -1 || !flag[OnLine1] || !flag[OnLine2]) // 没有任何交点
{
memset(flag, false, sizeof(flag));
inte = rayTrace(p1, p2, bsp_node->back, ignore_id, valid_id, order, wallID, flag);
}
}
else
{
memset(flag, false, sizeof(flag));
inte = rayTrace(p1, p2, bsp_node->back, ignore_id, valid_id, order, wallID, flag);
if(inte.x == -1 || !flag[OnLine1] || !flag[OnLine2])
{
order++;
memset(flag, false, sizeof(flag));
inte = lineIntersection(p1.x, p1.y, p2.x, p2.y, bsp_node->p1.x, bsp_node->p1.y, bsp_node->p2.x, bsp_node->p2.y, flag);
if(bsp_node->id == ignore_id)
inte.x = -1;
if(inte.x != -1)
wallID = bsp_node->id;
}
if(inte.x == -1 || !flag[OnLine1] || !flag[OnLine2])
{
memset(flag, false, sizeof(flag));
inte = rayTrace(p1, p2, bsp_node->front, ignore_id, valid_id, order, wallID, flag);
}
}
return inte;
}
// 对给定的 beam 进行递归遍历,以检测交点
// 第一次调用时,prev_node 与 p_tree 为空
void traverseBeam(Point p0, const vector<Line> &walls, BSPNode *bsp, BeamNode *beam, BeamNode *prev_beam, vector<Point> &path)
{
if(prev_beam == NULL) // 第一次调用
{
prev_beam = new BeamNode(-1); // 目前,射线跟踪中没有需要忽略的墙
path.push_back(p0); // 将 listener 的位置加入路径
}
// 发现从当前位置到下一个虚拟源之间的交点
// - 忽略 prev_beam.id (前一个交点所在的墙)
bool flag[4];
memset(flag, false, sizeof(flag));
int wallID = -2;
Point inte = rayTrace(p0, beam->vs, bsp, prev_beam->id, beam->id, 0, wallID, flag);
if(inte.x == -1 || (beam->id != -1 && wallID != beam->id) || !flag[OnLine1] || !flag[OnLine2])
inte.x = -1; // 没有与光束相交,或交点不在光束内
if(beam->id == -1) // 通往源点的路径,不需要碰撞检测
{
if(inte.x == -1) // 没有任何交点,说明可行
{
path.push_back(beam->vs); // 最终,将源点加入路径
return; // 结束
}
else
{
path.clear();
return; // 通往源点的路径被阻塞
}
}
else
{
// 没有交点,说明该路径非法
if(inte.x == -1)
{
path.clear();
return;
}
else
{
// 发现了一个交点,继续遍历 beam 的父节点
path.push_back(inte);
traverseBeam(inte, walls, bsp, beam->parent, beam, path);
//return;
}
}
}
// 递归遍历所有 beam, 返回反射路径
vector<vector<Point> > findPaths(Point listener, const vector<Line> &walls, BSPNode *bsp, BeamNode *beam)
{
vector<vector<Point> > path_array;
for(int i = 0; i < beam->children.size(); i++) // 递归遍历所有 beam 节点
{
vector< vector<Point> > tmp = findPaths(listener, walls, bsp, beam->children[i]);
for(int j=0; j<tmp.size(); j++)
path_array.push_back(tmp[j]);
}
vector<Point> path;
traverseBeam(listener, walls, bsp, beam, NULL, path); // 寻找到当前 beam 节点的所有合法路径
if(path.size()) // 如果发现了合法路径
{
path_array.push_back(path);
}
return path_array;
}
void init()
{
// 初始化
walls.push_back( Line(Point(100, 130), Point(120, 220)) );
walls.push_back( Line(Point(50, 55), Point(220, 60)) );
walls.push_back( Line(Point(220, 60), Point(250, 220)) );
walls.push_back( Line(Point(50, 220), Point(200, 220)) );
walls.push_back( Line(Point(50, 220), Point(50, 55)) );
walls.push_back( Line(Point(200, 220), Point(40, 230)) );
walls.push_back( Line(Point(40, 230), Point(30, 290)) );
walls.push_back( Line(Point(30, 290), Point(60, 270)) );
walls.push_back( Line(Point(60, 270), Point(290, 270)) );
walls.push_back( Line(Point(290, 270), Point(250, 220)) );
listener = Point(80, 100);
source = Point(200, 80);
}
vector<vector<Point> > getPaths()
{
bspNode = BSPTree(walls);
beamNode = BeamTree(source, walls, 4);
vector<vector<Point> > paths = findPaths(listener, walls, bspNode, beamNode);
return paths;
}
};
调用:
void drawInit(CDC* pDC, const BeamTrace &beam)
{
int mSize = 10;
CBrush fillbrush, fillbrush1;
CBrush *oldbrush;
fillbrush.CreateSolidBrush(RGB(255, 0, 0));
oldbrush = pDC->SelectObject(&fillbrush);
pDC->Ellipse(beam.source.x - mSize, beam.source.y - mSize, beam.source.x + mSize, beam.source.y + mSize);
fillbrush1.CreateSolidBrush(RGB(0, 255, 0));
oldbrush = pDC->SelectObject(&fillbrush1);
pDC->Ellipse(beam.listener.x - mSize, beam.listener.y - mSize, beam.listener.x + mSize, beam.listener.y + mSize);
CPen newPen(PS_SOLID, 2, RGB(0, 0, 0));
pDC->SelectObject(&newPen);
for(int i=0; i<beam.walls.size(); i++)
{
pDC->MoveTo(beam.walls[i].p1.x, beam.walls[i].p1.y);
pDC->LineTo(beam.walls[i].p2.x, beam.walls[i].p2.y);
}
}
void drawUpdate(CDC* pDC, const vector< vector<Point> > &paths)
{
//曲线
CPen newPen(PS_SOLID, 1, RGB(255, 255, 0));
pDC->SelectObject(&newPen);
for(int i=0; i<paths.size(); i++)
{
pDC->MoveTo(paths[i][0].x, paths[i][0].y);
for(int j=1; j<paths[i].size(); j++)
{
pDC->LineTo(paths[i][j].x, paths[i][j].y);
}
}
}
BeamTrace beam;
vector< vector<Point> > paths;
// CBeamView construction/destruction
CBeamView::CBeamView()
{
// TODO: add construction code here
beam.init();
paths = beam.getPaths();
}
void CBeamView::OnDraw(CDC* pDC)
{
CBeamDoc* pDoc = GetDocument();
ASSERT_VALID(pDoc);
// TODO: add draw code for native data here
CRect rcClient;
GetClientRect(&rcClient);
pDC->FillSolidRect(rcClient, RGB(255, 255, 255));
/*
CView *pView;
pView=(CView*)((CFrameWnd*)AfxGetApp()->m_pMainWnd)->GetActiveView();
pView->Invalidate();
*/
drawInit(pDC, beam);
drawUpdate(pDC, paths);
}
void CBeamView::OnLButtonDown(UINT nFlags, CPoint point)
{
// TODO: Add your message handler code here and/or call default
beam.listener.x = point.x;
beam.listener.y = point.y;
paths = beam.getPaths();
CDC* pDC = GetDC();
OnDraw(pDC);
CView::OnLButtonDown(nFlags, point);
}
github:https://github.com/buyouran1/beamTracing
参考:
S. Laine, S. Siltanen, T. Lokki, and L. Savioja. Accelerated beam tracing algorithm. Applied Acoustics, 70(1):172–181, 2009
http://blog.kaistale.com/?cat=12
注:3D beam 跟踪见本人 github — https://github.com/buyouran1/beamTracing3D


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









