







看完了《linux高性能服务器编程》对里面的定时器很感兴趣。书中提到三种定时器,分别是:基于升序链表的定时器,基于时间轮的定时器,基于时间堆的定时器。三种定时器的实现书中均是给了C++代码,不过我对C++不太感兴趣,虽然现在在做C++开发,因此写了C版本的。书中定时器只给了封装的定时器类,没有给调用层代码,我是估摸着写了调用层代码。这里做个总结,以后可以翻翻:
基于升序链表的定时器没太大难度,因此也懒得总结了。
说一下时间轮,下面是截的书中的图片
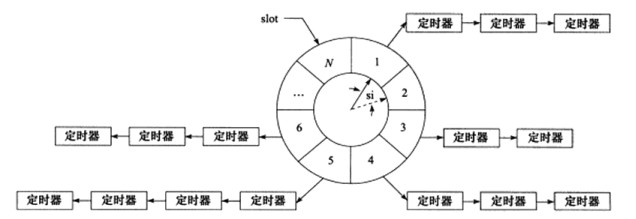
时间轮,像轮子一样滚动定时,每滚一个刻度,指针就走一个滴答,滚完一圈,就进入下一圈。因此有了这个概念,时间轮的结构也就出来了:1.齿轮(槽slot),用来标识一个滴答;2.槽间隔(slot interval ),当前槽经过多长时间到下一个槽;3.一圈的槽数量(N);4.当前指针,走一个滴答加一,走完一圈又回到初始位置。
再深入一点,定时器以什么方式添加到槽上?可以看图,每一个槽其实就是一个链表头结点,定时器即添加到所属槽的链表后。这样我们可以对时间轮性能进行分析,SI越小,定时精度越高,如果SI=10s,那么我们指定的定时器只能是10s的倍数;如果N越大,定时器效率越高,这也很好理解,N越小,一圈槽数量越少,那么我们同样添加100个定时器,分配到每个头结点的定时器越多,每一次滴答到时,就遍历当前槽,遍历一次所花时间越多。
如何确定定时器位置?根据定时器到时时间可以计算,例如:定时器超时时间timeout=21s(即21s后触发定时器),当前间隔SI=2s,一圈槽数量N=70,当前指针cur_slot指向第5个槽,我们可以计算出定时器放置的位置,这里需要两个变量,一个rotation指定定时器处于第几圈,一个slot指定定时器处于第几个槽,因此slot = ( cur_slot + timeout / SI ) % N = 15, rotation = timeout / SI / N = 0,即此定时器被放置于15槽的链表后,至于是链表头插还是尾插这个随意,指针滴答到了15槽即触发15槽到时,遍历15槽链表,若rotation=0的表示为当前该触发定时器,若rotation>0的定时器对rotation–(其实很好理解,cur_slot在转当前轮,则不处理后面的轮,只对它的rotation减一就跳过,等到cur_slot转下一圈再判断此定时器)。根据这个计算,如果其它参数不变,现在有一个timeout=161s的定时器,cur_slot=5,我们可以计算出这个定时器的slot=15,rotation=1,正好处于第15槽,但是是下一转触发该触发。
也就是说,如果我们根据以上参数,同时添加一个15s和一个161s定时器,他们都会随时间轮轮转触发到,只不过指针第一次只想15槽时,判断15s的定时器rotation为0,则触发定时器,然后删除定时器,遍历到161s定时器时,rotation=1,执行减1,跳过继续轮转,当cur_slot=70的时候也就是时间轮走过65*2=130s时,时间轮转一圈,cur_slot=0,继续下一圈开始,再走过14*2=28s后,到达15槽,判断161s定时器,rotation=0,触发定时器。
有了这些分析,下面直接贴代码:
#include <stdio.h>
#include <string.h>
#include <time.h>
#include <unistd.h>
#include <signal.h>
#include <stdlib.h>
typedef struct client_data {
int fd;
time_t tt;
char buf[512];
void* data;
}client_data;
typedef struct tw_timer {
//处于时间轮第几转,即时间轮转多少转
//此定时器可以处于当前转,若再加上槽
//即可确定此定时器所处时间轮位置
int rotation;
//处于当前时间轮转的第几个槽
int slot;
//定时器到时执行的回调函数
void* (*cb_func)( void* param );
//用户数据,触发回调任务函数的参数
struct client_data c_data;
//这里只需要单向不循环链表即可
//struct tw_timer* prev;
struct tw_timer* next;
}tw_timer;
typedef struct timer_manager {
//时间轮当前槽,每经过一个间隔时间,加一实现轮转动,
//超过总槽数即归零表示当前轮转完
int cur_slot;
//时间轮一转的总槽数,总槽数越大槽链表越短,效率越高
int slot_num_r;
//相邻时间槽间隔时间,即时间轮转到下一个槽需要时间,
//间隔时间越短,精度越高,例如10s,表示定时器支持10s
//间隔定时器添加,最小支持1s
int slot_interval;
//每个时间槽链表头结点,即一个槽管理一条链表,链表
//添加相同槽数的结点,但转数可能不同
struct tw_timer* slots_head[512];
}timer_manager;
timer_manager tmanager;
void* ontime_func( void* param )
{
client_data* data = (client_data*)param;
time_t tt = time(NULL);
printf("\n----------------------------------------------------\n");
printf("\tontime,interval:%d\n", (int)(tt - data->tt));
printf("\told time:%s", ctime(&data->tt));
printf("\t%s", data->buf);
printf("\tcur time:%s", ctime(&tt));
//getchar();
printf("----------------------------------------------------\n");
return NULL;
}
int add_timer( timer_manager* tmanager,
int timeout, client_data* c_data )
{
if ( timeout < 0 || !tmanager )
return -1;
int tick = 0; //转动几个槽触发
int rotation = 0; //处于时间轮第几转
int slot = 0; //距离当前槽相差几个槽
if ( timeout < tmanager->slot_interval )
tick = 0;
else
tick = timeout / tmanager->slot_interval;
rotation = tick / tmanager->slot_num_r;
slot = ( tmanager->cur_slot + tick % tmanager->slot_num_r )
% tmanager->slot_num_r - 1;
printf("addtimer-->timeout:%d, rotation:%d,slot:%d\n",
timeout, rotation, slot);
tw_timer* tmp_t = (tw_timer*)malloc(sizeof(tw_timer));
tmp_t->rotation = rotation;
char buf[100] = {0};
time_t tt = time(NULL) + timeout;
sprintf( buf, "set time:%s", ctime(&tt));
memset( tmp_t->c_data.buf, 0, sizeof(tmp_t->c_data.buf));
strcpy( tmp_t->c_data.buf, buf );
tmp_t->slot = slot;
tmp_t->c_data.tt = time(NULL);
tmp_t->cb_func = ontime_func;
if ( !tmanager->slots_head[slot] )
{
tmanager->slots_head[slot] = tmp_t;
tmp_t->next = NULL;
//printf("[line]:%d\n", __LINE__);
return 0;
}
//printf("[line]:%d\n", __LINE__);
tmp_t->next = tmanager->slots_head[slot]->next;
tmanager->slots_head[slot]->next = tmp_t;
return 0;
}
int del_all_timer( timer_manager* tmanager )
{
//清除、释放所有定时器,懒得写了
}
int tick( timer_manager* tmanager )
{
if ( !tmanager )
return -1;
tw_timer* tmp = tmanager->slots_head[tmanager->cur_slot];
tw_timer* p_tmp;
while ( tmp )
{
//rotation减一,当前时间轮转不起作用
//假设这个tmp指向第0个槽的头,链中某个结点的rotaion为下一圈,
//即rotation=1,所以这个定时器不起作用,而因为cur_slot不断
//走动,tmp在当前转不可能再指向这个定时器,下一圈cur_slot
//为0时能继续判断这个定时器,故实现了定时器处于不同转的判断
if ( tmp->rotation > 0 )
{
tmp->rotation--;
p_tmp = tmp;
tmp = tmp->next;
}
else
{
//否则定时器到时,触发回调函数
tmp->cb_func( &tmp->c_data );
//删除此定时器结点
//吃了没用双向链表的亏,写这么low
if ( tmp == tmanager->slots_head[tmanager->cur_slot] )
{
//printf("[line]:%d\n", __LINE__);
tmanager->slots_head[tmanager->cur_slot] = tmp->next;
p_tmp = tmp;
tmp = tmp->next;
free( p_tmp );
p_tmp = NULL;
p_tmp = tmp;
//printf("[line]:%d\n", __LINE__);
}
else
{
p_tmp->next = p_tmp->next->next;
free( tmp );
tmp = NULL;
tmp = p_tmp->next;
}
}
}
//更新时间轮,转动一个槽,转一圈又从开始转
tmanager->cur_slot = ++tmanager->cur_slot % tmanager->slot_num_r;
return 0;
}
int init_t_manager( timer_manager* tmanager,
int slot_num_r, int slot_interval )
{
tmanager->cur_slot = 0;
tmanager->slot_num_r = slot_num_r;
tmanager->slot_interval = slot_interval;
return 0;
}
//自己试着写的调用层代码
void alarm_handler( int sig )
{
time_t tt = time(NULL);
//printf("timer tick:%s", ctime(&tt));
int ret = tick( &tmanager );
if ( ret < 0 )
printf("tick error\n");
alarm( tmanager.slot_interval );
}
int main()
{
time_t tt = time(NULL);
signal( SIGALRM, alarm_handler );
//init_t_manager( &tmanager, 60, 10 );
init_t_manager( &tmanager, 60, 1 );
add_timer( &tmanager, 6, NULL );
add_timer( &tmanager, 11, NULL );
add_timer( &tmanager, 22, NULL );
add_timer( &tmanager, 33, NULL );
add_timer( &tmanager, 44, NULL );
add_timer( &tmanager, 55, NULL );
add_timer( &tmanager, 66, NULL );
add_timer( &tmanager, 77, NULL );
add_timer( &tmanager, 88, NULL );
add_timer( &tmanager, 99, NULL );
add_timer( &tmanager, 111, NULL );
add_timer( &tmanager, 122, NULL );
add_timer( &tmanager, 133, NULL );
add_timer( &tmanager, 144, NULL );
printf("start time:%s\n", ctime(&tt));
alarm( tmanager.slot_interval );
while ( 1 )
sleep( 5 );
return 0;
}
看以上代码,main函数开始即指定了SI=1s,N=60,并添加了很多定时器,然后开始以SI执行定时,每一次到时就触发滴答函数tick(),如此循环定时触发到时信号就实现了时间轮轮转。
关于代码的思考:这里用了SIGALRM信号,每一次到时,主线程暂停,去执行信号函数内容,如果信号SIGALRM的处理函数太庞大,会影响主线程的任务卡顿,虽然以上代码执行量不大,但为了扩展,我觉得可以将定时器触发执行的操作改为添加任务结点到任务链,这样配合线程池效率会高一点,线程池本身会从任务链取任务结点执行,如果我们的定时处理函数只是往任务链放任务,那性能会高很多,而不是往cb_func里执行具体业务逻辑。
下一篇上时间堆。















 5517
5517

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









