






一)维纳滤波
维纳滤波是在频域中处理图像的一种算法,是一种非常经典的图像增强算法,不仅可以进行图像降噪,还可以消除由于运动等原因带来的图像模糊。
1. 基本原理
在图像拍摄过程中由于各种原因会造成图像退化,图像退化模型如下:

其中,⋆ 为卷积符号,f ( x , y ) 为输入图像,g ( x , y ) 为退化图像,h ( x , y ) 为退化函数,η ( x , y ) 为加性噪声,将上式进行傅里叶变换有:

根据傅里叶变换的特性,空间域中的卷积相当于频率域中的乘积。
(1) 如果不考虑退化函数,图像退化模型就简化为图像噪声模型: 
图像增强问题成为单纯的图像去噪问题,可以通过空间域滤波等众多方法解决。
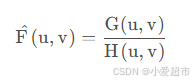
(2) 如果不考虑加性噪声,图像退化模型就简化为:

这种问题可以通过逆滤波解决,即通过傅里叶变化以及阵列除法即可获得恢复后的图像频谱
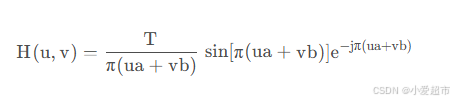
那么H ( u , v ) 怎么获得呢?《数字图像处理》中的方法有观察估计、实验估计和建模估计,例如建模估计中可以通过运动数学模型将退化函数构造为:
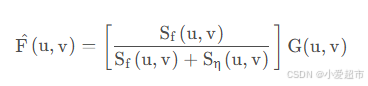
(3) 如果退化函数和加性噪声都考虑,空域滤波器无法解决图像退化问题,逆滤波效果因为噪声的存在会变得非常差,这个时候就需要用到维纳滤波,(维纳滤波的推导写在结论中)维纳滤波公式如下:

其中,
![]() 为噪声的功率谱,这个我们可以通过用户输入的方差构造一个噪声图像N ( u , v ) 并计算功率谱;
为噪声的功率谱,这个我们可以通过用户输入的方差构造一个噪声图像N ( u , v ) 并计算功率谱;![]() 为输入图像的功率谱,这里乍一看会觉得有点问题,我们如果知道输入图像还需要滤波干嘛?我们当然不知道输入图像,因为真实图像的功率谱都是类似的,因此我们用一个参考图像计算功率谱即可,在下面的例子中就是使用的lena的灰度图作为参考图像;
为输入图像的功率谱,这里乍一看会觉得有点问题,我们如果知道输入图像还需要滤波干嘛?我们当然不知道输入图像,因为真实图像的功率谱都是类似的,因此我们用一个参考图像计算功率谱即可,在下面的例子中就是使用的lena的灰度图作为参考图像;
下面的例子中我们还对退化函数进行了简化,将退化函数置为1,因此维纳滤波公式简化为:
(二)反模糊
反模糊化是模糊控制理论中将模糊集合转换为精确值的一个重要步骤。在模糊控制系统中,通过模糊化处理后的模糊集合需要最终转换为清晰的数值输出,以便于实际应用。以下是几种常用反模糊化方法的详细介绍:
1. 中心平均法(Center of Gravity Defuzzication):该方法计算模糊集合重心所对应的精确值。它是通过计算模糊集合所有隶属度函数加权平均的积分来实现的。这种方法较为直观,计算结果往往能较好地反映模糊集合的总体趋势。
2. 面积中心法(Center of Sum Defuzzication):与中心平均法类似,面积中心法也是计算模糊集合的重心位置,但它不使用积分,而是直接对隶属度函数求和并计算加权中心。
3. 最大面积法(Center of Largest Area Defuzzication):此方法选取模糊集合中具有最大面积的区间,并将该区间的中心值作为输出。
4. 最大值法(Maximization Defuzzication):该方法将模糊集合中隶属度最大的元素作为输出。这包括了几种不同的变体,如最大值法、最大值首法(First of Maximum Defuzzication)、最大值尾法(Last of Maximum Defuzzication)和最大值平均法(Mean of Maximum Defuzzication)。
5. 高度法(Height Defuzzication):此方法选取隶属度最高的元素值作为输出,忽略所有隶属度低于该值的元素。
6. 扩展原理(Extension Principle):它是由Zadeh提出的,用于将模糊集合映射到精确集合的一种处理方式。扩展原理提供了模糊逻辑与传统二值逻辑之间的联系。
7. -裁剪法(-Cut Defuzzication):该方法基于模糊集合的α-裁剪来获取一个区间,然后从这个区间中选择一个值作为精确值。

















 1919
1919

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









