







在建筑工程领域,塔机作为关键的起重设备,其性能的优劣直接关乎施工效率与安全。长沙湾流智能科技有限公司技术团队针对三一重工塔机结构展开深入剖析。本次分析聚焦于塔机回转机电系统,旨在全面梳理该系统的组成、深入分析现存问题,并创新性地提出回转增稳控制方案,为提升三一重工塔机的操控性能与稳定性提供有力的技术支撑 ,推动行业技术的进一步发展。
PART1 塔机回转机电系统
1、塔机回转机电系统组成
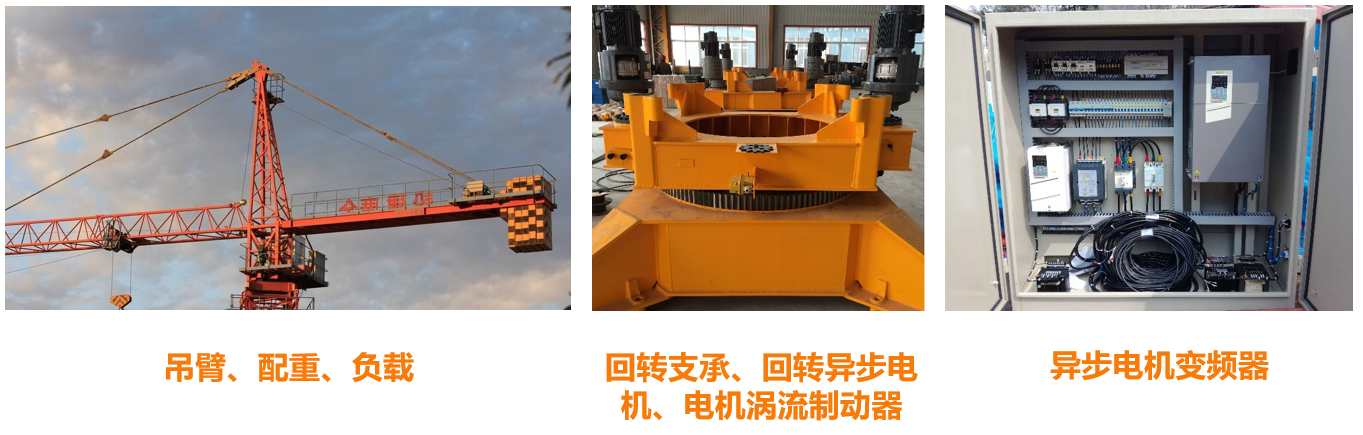
塔机回转机电系统由以下三部分组成:
- 吊臂、配重、负载
- 回转支承、回转异步电机、电机涡流制动器
- 异步电机变频器
2、塔机回转机电系统分析
吊臂、配重和负载:
1. 重量大,旋转半径大,旋转惯量大;
2. 负载在作业时前后移动导致整体回转惯量时变;
3. 回转快速启动和制动时,末端发生弹性形变,增加操控难度;
4. 过长的吊臂,容易受到风的影响,产生风力扭矩;
回转支承、回转异步电机、电涡流制动器:
1. 回转支承负载为滚动摩擦,阻尼很小;
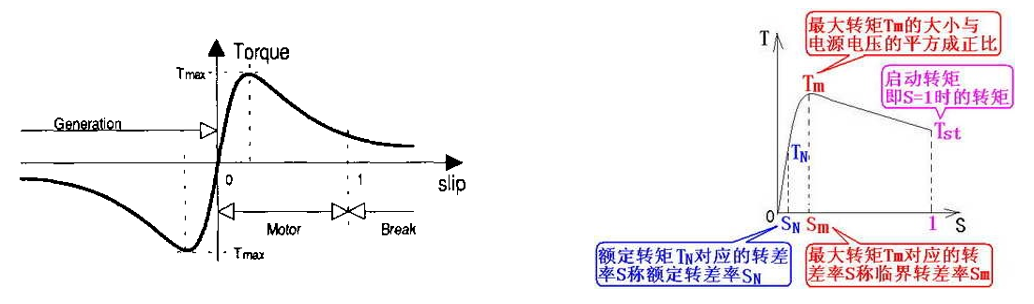
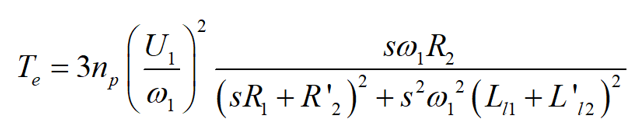
2. 异步电机靠定子电磁场与笼形转子的转差率来产生电磁扭矩;
3. 电涡流制动器的作用力直接作用在电机转子上,电机转子通过减速机刚性连接在回转 支承上,等效于阻尼直接作用在回转支承上;
4. 电涡流阻尼特性存在非线性影响操控,电涡流阻尼的大小如何与变频器多段速输入匹配,从而使操控效率最佳?是一个难题;
3、塔机回转机电系统分析
异步电机变频器:
1. 异步电机变频器采用恒压频比(V/F)方式驱动两台并联的异步电机,低速时输出扭矩波动大,效率低;
2. V/F变频器为开环控制,体现为柔性响应,电机转子输出转速不等于变频器的输入转速,负载不同则转差率不同,从而在有负载扰动时增加了电机输出转速的波动;
3. V/F变频器比较于矢量变频器,瞬态响应滞后;
4. 变频器的加减速曲线的形式对操控效率的影响显著;
5. 电涡流阻尼的主动控制与变频器的加减速曲线如何匹配可以达到最佳?是一个难题;
PART2 塔机回转增稳控制方案
1、塔机回增稳控制解决思路
1. 明确当前塔机回转存在的控制问题;
2. 引入回转角速度反馈,采取主动补偿来达到回转增稳的目标,增强塔机操控品质的一致性;
3. 依据物理关系建立塔机回转数学模型,分析本质变量间的制约关系;
4. 依据物理模型来设计控制算法的主体部分;
5. 依据调试的具体情况,来优化和完善具体的控制算法;
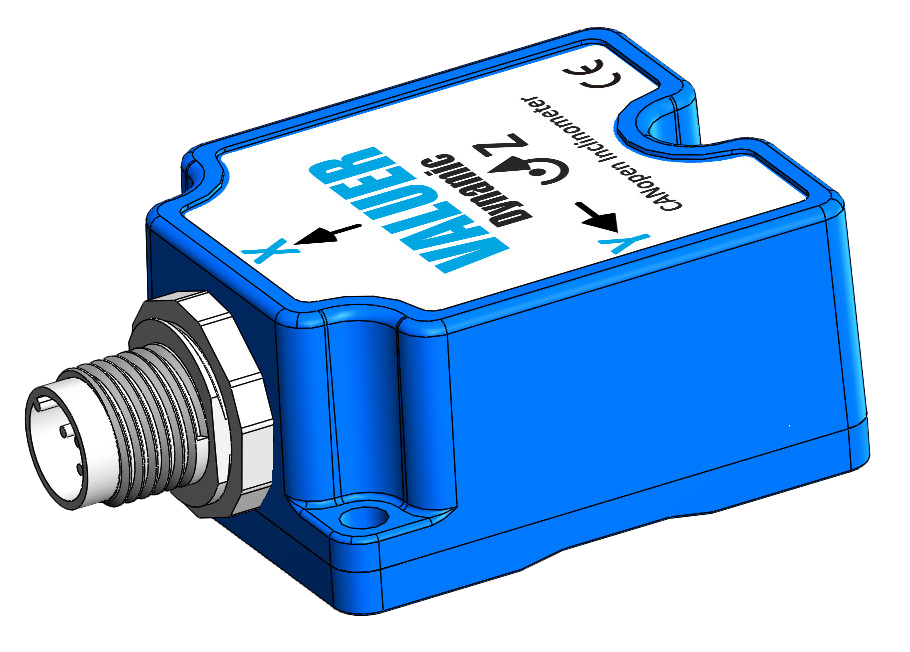
2、回转角速度传感器:回转轴陀螺仪
工业级回转轴陀螺仪采用先进的MEMS(微机电系统)技术,经过VALUER湾流公司特别优化,可以实现在极低速度下的低噪声的角速度测量。
3、陀螺仪传感器应用领域

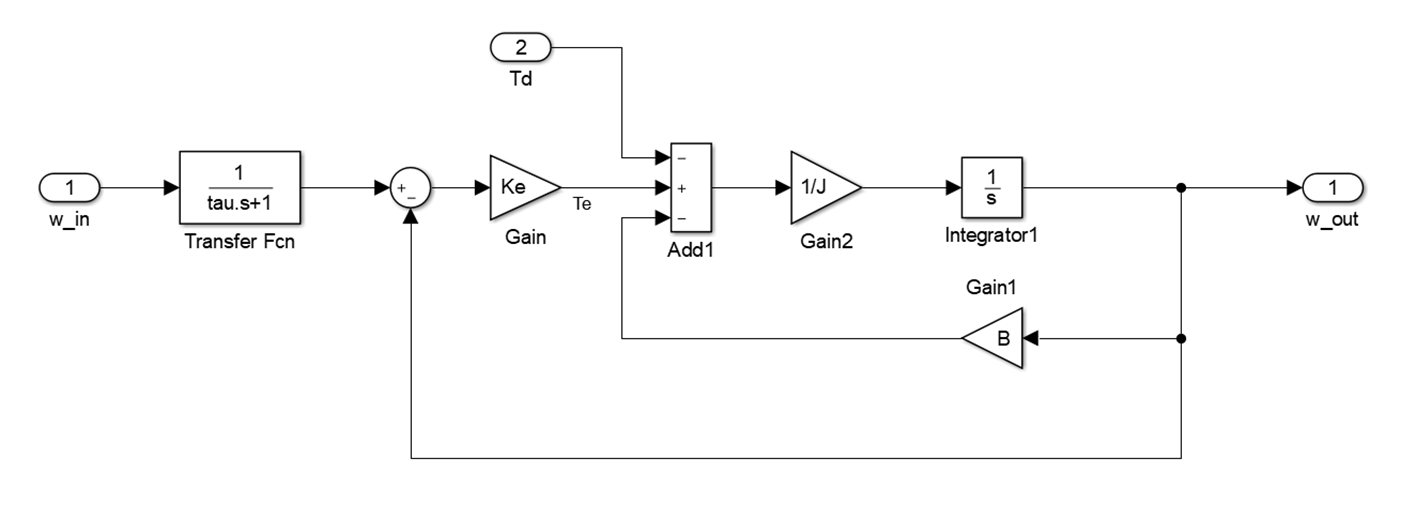
4、塔机回转动力学模型
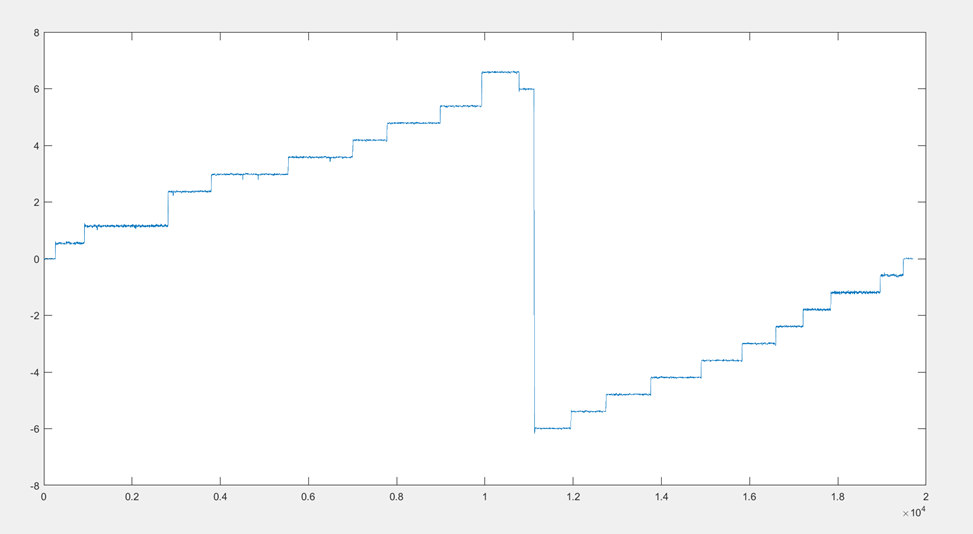
6、闭环控制策略1
7、闭环控制策略2
8、其他策略
1. 阻尼优化策略,利用陀螺仪角速率来优化电涡流阻尼输入,解决电涡流与多段速输入 匹配问题;
2. 非线性PID策略;
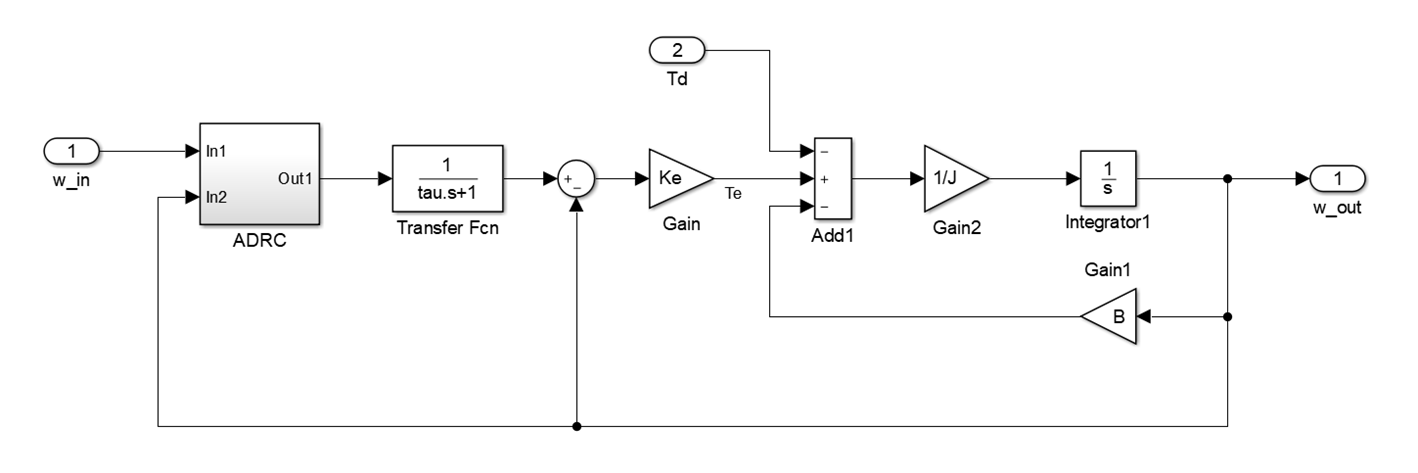
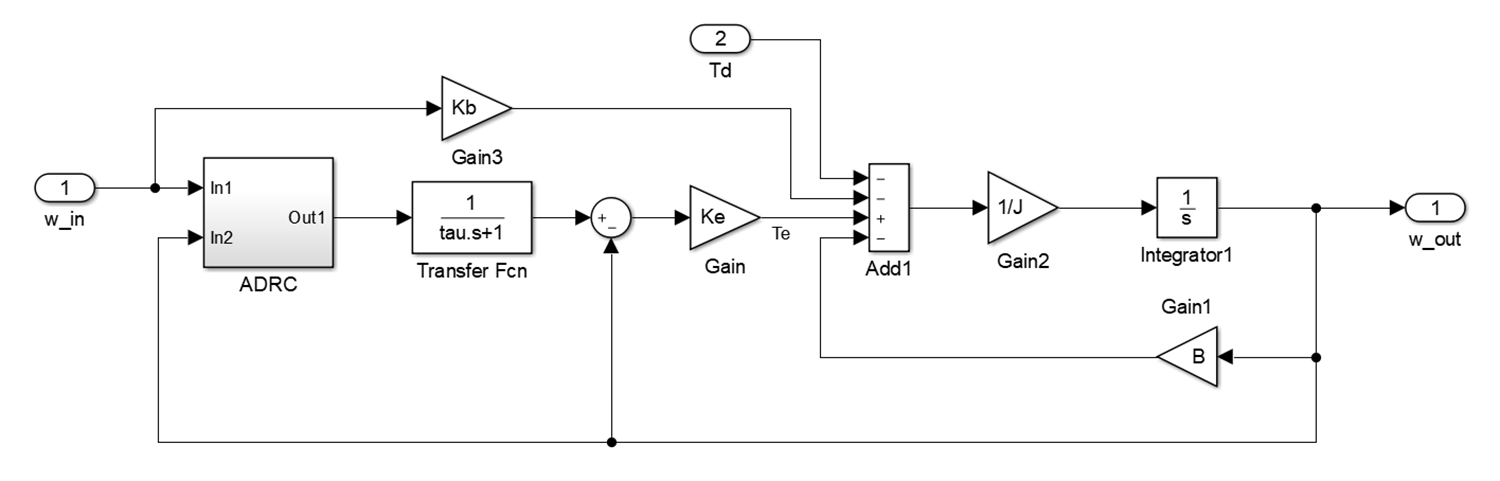
3. 自抗扰闭环控制(ADRC)策略;
PART3 塔机回转机电系统及增稳控制技术总结
1、塔机回转机电系统:
- 系统组成:由吊臂、配重、负载,回转支承、回转异步电机、电机涡流制动器,以及异步电机变频器三部分构成。
- 系统分析:吊臂、配重和负载存在重量大、旋转半径大、惯量时变、易受风力影响等问题;回转支承阻尼小,异步电机靠转差率产生扭矩,电涡流制动器作用于电机转子但阻尼特性非线性;异步电机变频器采用恒压频比(V/F)方式驱动,存在低速输出扭矩波动大、开环控制转速波动、瞬态响应滞后以及加减速曲线影响操控效率等问题。
2、塔机回转增稳控制方案:
- 解决思路:明确控制问题,引入回转角速度反馈主动补偿,建立回转数学模型,设计并优化控制算法。
- 关键部件:采用工业级回转轴陀螺仪,利用 MEMS 技术实现低噪声慢速测量。
- 控制策略:包括阻尼优化策略,利用陀螺仪角速率优化电涡流阻尼输入;非线性 PID 策略;自抗扰闭环控制(ADRC)策略 ,以解决系统存在的操控难题,提升塔机回转操控品质和稳定性。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









