







stm32f4 使用FreeRTOS例程
引言
随着物联网(IoT)和嵌入式系统的发展,实时操作系统(RTOS)在资源受限的嵌入式设备上得到了广泛应用。FreeRTOS作为一种开源的、可裁剪的RTOS,因其轻量级、高可靠性和易于移植的特性,成为了众多开发者的首选。本文将详细介绍如何在STM32F4系列微控制器上使用FreeRTOS,并通过一个简单的例程来展示其基本用法。
开发环境搭建
硬件准备:STM32F4系列开发板(如STM32F407VG)。
软件准备:
STM32CubeMX:用于配置STM32的外设、时钟和生成初始化代码。
Keil MDK-ARM或STM32CubeIDE:集成开发环境,用于编写、编译和调试代码。
FreeRTOS源码:从FreeRTOS官网下载,或者从STM32Cube软件包中获取适配STM32的FreeRTOS中间件。
配置STM32CubeMX
时钟配置:配置系统时钟,确保系统以合适的频率运行。
外设配置:根据需要配置外设,如USART用于串口调试、LED等。
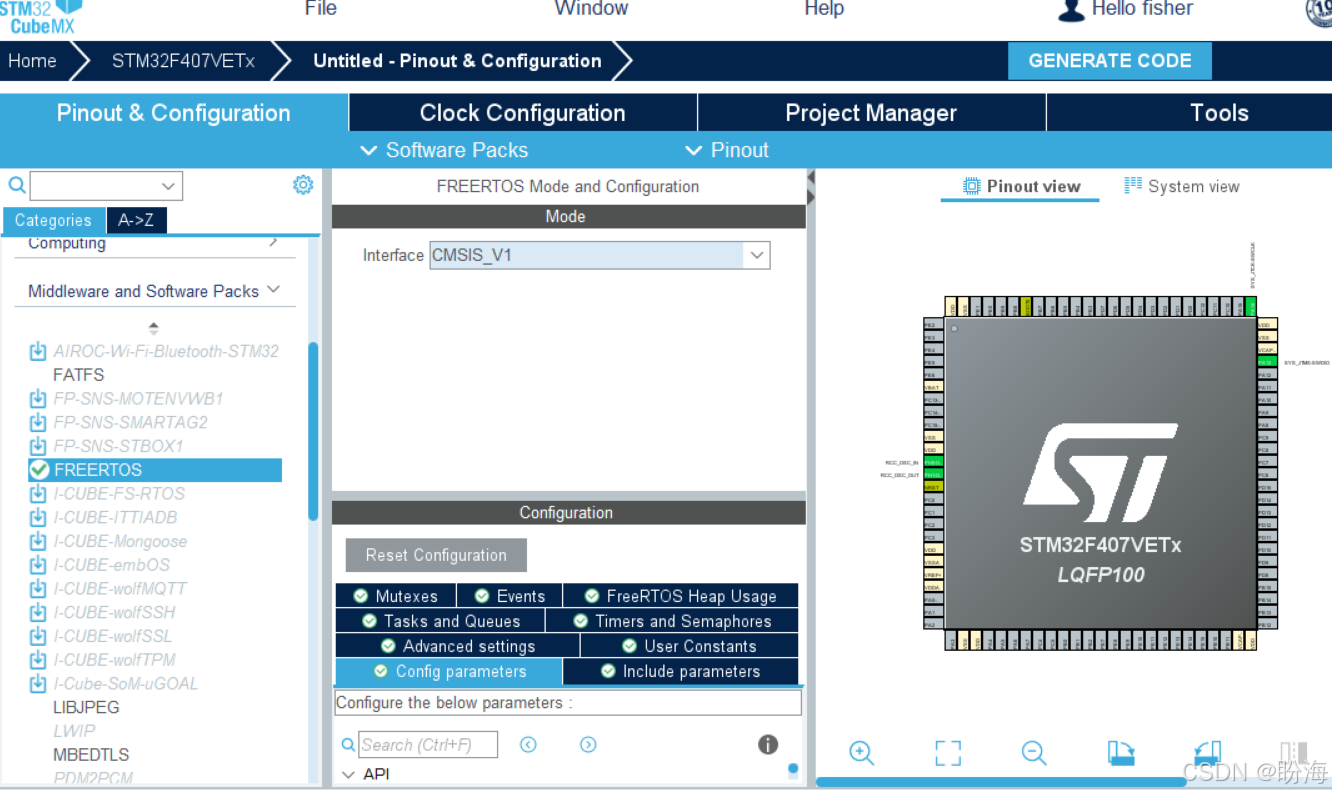
FreeRTOS配置:
在“Middleware”选项卡中启用FreeRTOS。
设置FreeRTOS任务的优先级、堆栈大小等参数。
根据需要添加任务、队列、信号量等资源。
编写FreeRTOS任务代码
以下是一个简单的FreeRTOS任务示例,用于在LED上实现闪烁效果。
#include “FreeRTOS.h”
#include “task.h”
#include “stm32f4xx_hal.h”
// LED引脚初始化
void LED_Init(void)
{
__HAL_RCC_GPIOC_CLK_ENABLE();
GPIO_InitTypeDef GPIO_InitStruct = {0};
GPIO_InitStruct.Pin = GPIO_PIN_13;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);
}
// LED闪烁任务
void LED_Task(void *pvParameters)
{
LED_Init();
while(1)
{
HAL_GPIO_TogglePin(GPIOC, GPIO_PIN_13);
vTaskDelay(pdMS_TO_TICKS(500)); // 延时500毫秒
}
}
// 创建任务
void MX_FreeRTOS_CreateTasks(void)
{
xTaskCreate(
LED_Task, // 任务函数
“LED_Task”, // 任务名称
configMINIMAL_STACK_SIZE, // 堆栈大小
NULL, // 任务输入参数
tskIDLE_PRIORITY + 1, // 任务优先级
NULL // 任务句柄
);
}
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_FreeRTOS_CreateTasks();
// 启动FreeRTOS调度器
vTaskStartScheduler();
// 如果调度器启动失败,则进入死循环(通常不会执行到这里)
while (1)
{
}
}
// 其他必要的回调函数和中断服务程序…
编译与调试
使用STM32CubeMX生成项目文件,并在Keil MDK-ARM或STM32CubeIDE中打开。
编译项目,确保没有错误。
下载程序到STM32F4开发板。
通过串口调试工具观察程序输出(如果有),或观察LED的闪烁效果。
结论
通过以上步骤,我们成功地在STM32F4系列微控制器上移植并运行了FreeRTOS。通过创建简单的LED闪烁任务,我们展示了FreeRTOS的基本用法和任务调度机制。FreeRTOS的强大功能使得开发者能够构建更加复杂、高效的嵌入式系统,而STM32F4系列微控制器的强大性能则为这些系统的实现提供了坚实的基础。




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











