




 该博客介绍了肌电信号手势识别系统,包括3通道硬件采集模组和软件处理系统。硬件部分由肌电模组和信号放大模块构成,采集肌肉电信号;上位机负责数据读取、分析和训练,支持模型导入导出。通过Arduino串口通信,配合上位机软件进行手势识别训练,随着训练次数增加,识别准确性提高。这一技术在人工智能、医疗康复等领域有广泛应用前景。
该博客介绍了肌电信号手势识别系统,包括3通道硬件采集模组和软件处理系统。硬件部分由肌电模组和信号放大模块构成,采集肌肉电信号;上位机负责数据读取、分析和训练,支持模型导入导出。通过Arduino串口通信,配合上位机软件进行手势识别训练,随着训练次数增加,识别准确性提高。这一技术在人工智能、医疗康复等领域有广泛应用前景。
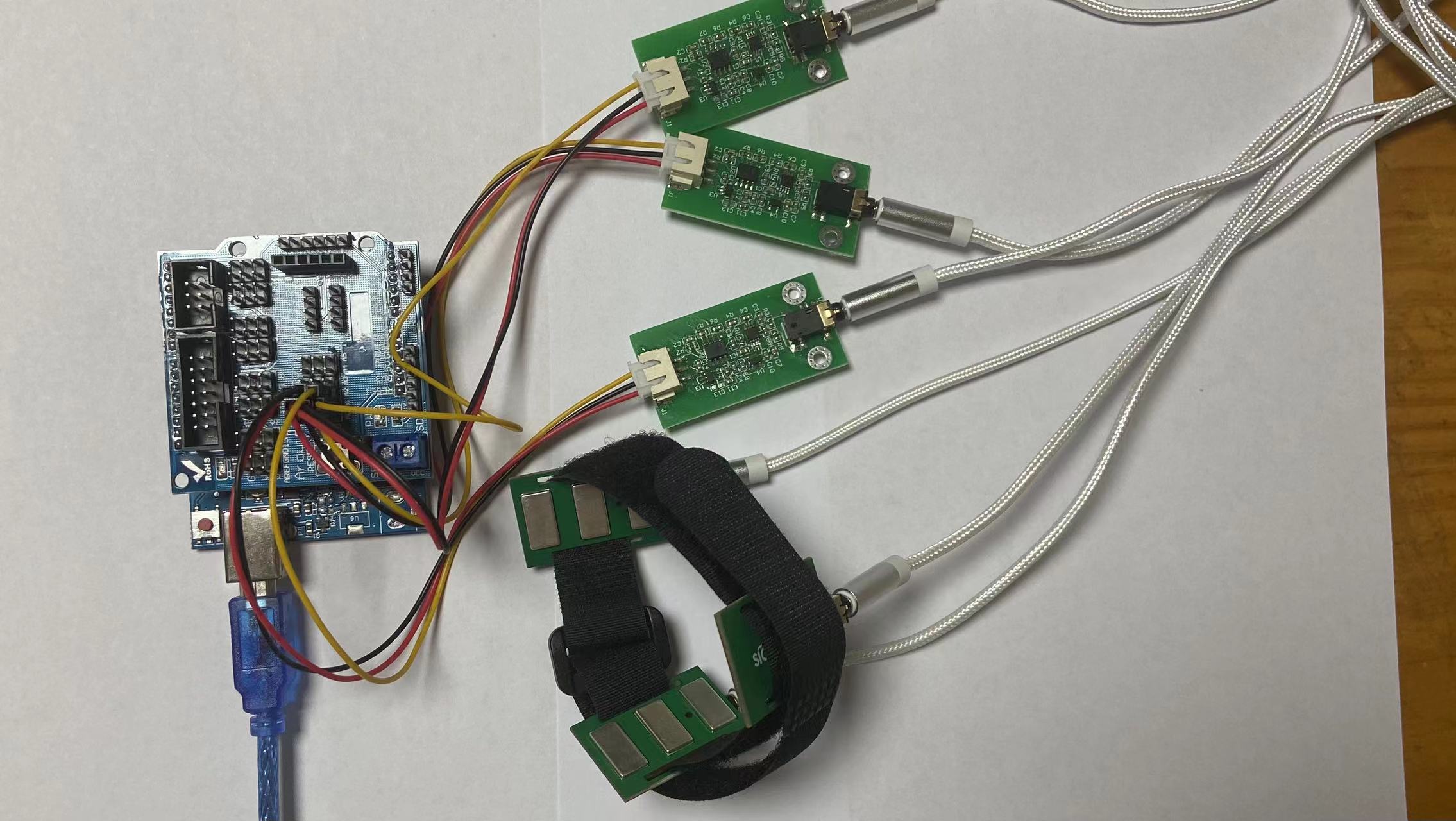
整套的识别系统分为3通道的硬件采集模组和内置处理算法的软件处理系统。
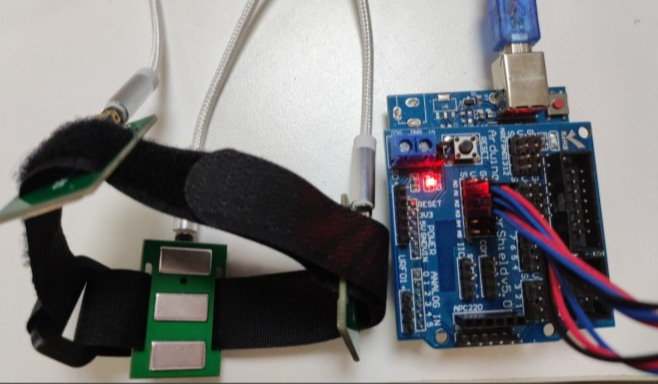
硬件部分采用3个干电极的肌电模组和信号放大模块组成,用于采集3通道的肌肉电信号。
上位机集成了对数据进行读取,分析,训练,识别等功能算法,同时支持训练模型和采集数据的导入、导出。方便后续对数据的分析、处理。
硬件采集的数据通过串口发送给上位机。
Arduino示例代码:
void setup()
{
Serial.begin(115200);
delay(200);
}
void loop()
{
int adc[3];
//将肌电信号值保持在 0 附近
adc[0] = analogRead(A1)-310;
adc[1] = analogRead(A2)-310;
adc[2] = analogRead(A3)-310;
Serial.print(adc[0]);
Serial.print(" ");
Serial.print(adc[1]);
Serial.print(" ");
Serial.print(adc[2]);
Serial.print("\n");
}Arduino代码比较简单。主要算法都写在上位机处理软件里面了。
在正确佩戴好3通道的干电极肌肉电采集模组后,菜单栏中点击"工具" , 打开arduino的 " 串口绘图器 " ,握拳可以观察到肌电的信号变化
</
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 805
805

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









