FIMC这个名字应该是从S5PC1x0开始出现的,在s5pv210里面的定义是摄像头接口,但是它同样具有图像数据颜色空间转换的作用。而exynos4412对它的定义看起来更清晰些,摄像头接口被定义为FIMC-LITE 。颜色空间转换的硬件结构被定义为FIMC-IS。不多说了,我们先来看看Linux3.0.8 三星的BSP包中与fimc驱动相关的文件。
上面的源码文件组成了整个fimc的驱动框架。通过.c文件的命名也大致可以猜测到FIMC的几个用途:
1、Capture ,Camera Interface 用于控制Camera,及m2m操作
2、Output,这个用途可以简单看成:只使用了FIMC的m2m功能,这里fimc实际上就成了一个带有颜色空间转换功能的高速DMA。
3、Overlay,比如Android 的Overlay就依赖了FIMC的这个功能,可以简单把它看作是个m2fb,当然实质上还是m2m。
清楚FIMC的大致用途了。再来说说,每个C文件在FIMC驱动框架中扮演了何种角色:
csis.c文件,用于MIPI 接口的摄像头设备,这里不多说什么了。
fimc_dev.c 是驱动中对FIMC硬件设备最高层的抽象,这在后面会详细介绍。
fimc_v4l2.c linux驱动中 ,将fimc 设备的功能操作接口(Capture,output,Overlay),用v4l2框架封装。在应用层用过摄像头设备,或在应用层使用FMIC设备完成过m2m操作的朋友应该都清楚,fimc经层层封装后最终暴露给用户空间的是v4l2 标准接口的设备文件 videoX。 这里面也引出了一个我们应该关注的问题:Fimc设备在软件层上是如何同摄像头设备关联的。
fimc_capture.c 实现对camera Interface 的控制操作,它实现的基础依赖硬件相关的摄像头驱动(eg.ov965X.c / ov5642.c 等)。 并且提供以下函数接口,由fimc_v4l2.c文件进一步封装
int fimc_g_parm(struct file *file, void*fh, struct v4l2_streamparm *a)
int fimc_s_parm(struct file *file, void*fh, struct v4l2_streamparm *a)
intfimc_queryctrl(struct file *file, void *fh, struct v4l2_queryctrl *qc)
intfimc_querymenu(struct file *file, void *fh, struct v4l2_querymenu *qm)
intfimc_enum_input(struct file *file, void *fh, struct v4l2_input *inp)
intfimc_g_input(struct file *file, void *fh, unsigned int *i)
intfimc_release_subdev(struct fimc_control *ctrl)
intfimc_s_input(struct file *file, void *fh, unsigned int i)
intfimc_enum_fmt_vid_capture(struct file *file, void *fh,struct v4l2_fmtdesc *f)
intfimc_g_fmt_vid_capture(struct file *file, void *fh, struct v4l2_format *f)
intfimc_s_fmt_vid_capture(struct file *file, void *fh, struct v4l2_format *f)
intfimc_try_fmt_vid_capture(struct file *file, void *fh, struct v4l2_format *f)
intfimc_reqbufs_capture(void *fh, struct v4l2_requestbuffers *b)
intfimc_querybuf_capture(void *fh, struct v4l2_buffer *b)
intfimc_g_ctrl_capture(void *fh, struct v4l2_control *c)
intfimc_s_ctrl_capture(void *fh, struct v4l2_control *c)
intfimc_s_ext_ctrls_capture(void *fh, struct v4l2_ext_controls *c)
intfimc_cropcap_capture(void *fh, struct v4l2_cropcap *a)
intfimc_g_crop_capture(void *fh, struct v4l2_crop *a)
intfimc_s_crop_capture(void *fh, struct v4l2_crop *a)
intfimc_start_capture(struct fimc_control *ctrl)
intfimc_stop_capture(struct fimc_control *ctrl)
intfimc_streamon_capture(void *fh)
intfimc_streamoff_capture(void *fh)
intfimc_qbuf_capture(void *fh, struct v4l2_buffer *b)
intfimc_dqbuf_capture(void *fh, struct v4l2_buffer *b)
fimc_output.c 实现fimc m2m操作,需要用FIMC实现硬件颜色空间转换的时候,这个文件里的函数就派上作用了,另外在fimc 用于Capture 和 overlay 过程本质上也包含m2m操作。因此除了提供功能函数接口,由fimc_v4l2.c文件进一步封装。另外还提供了一些功能函数供fimc_dev.c调用,比如用于设置一个m2m过程的srcAddr(源地址) 和 dstAddr(目的地址)。这部分接口太多就不贴出来了。
fimc_overlay.c 实现fimc overlay操作。同样提供函数接口,由fimc_v4l2.c文件进一步封装。
fimc_regs.c Fimc硬件相关操作,基本寄存器配置等。这个文件提供函数接口供fimc_capture.c、fimc_output.c、fimc_overlay.c调用。
通过刚才的分析,可以总结出下面的源码结构图:
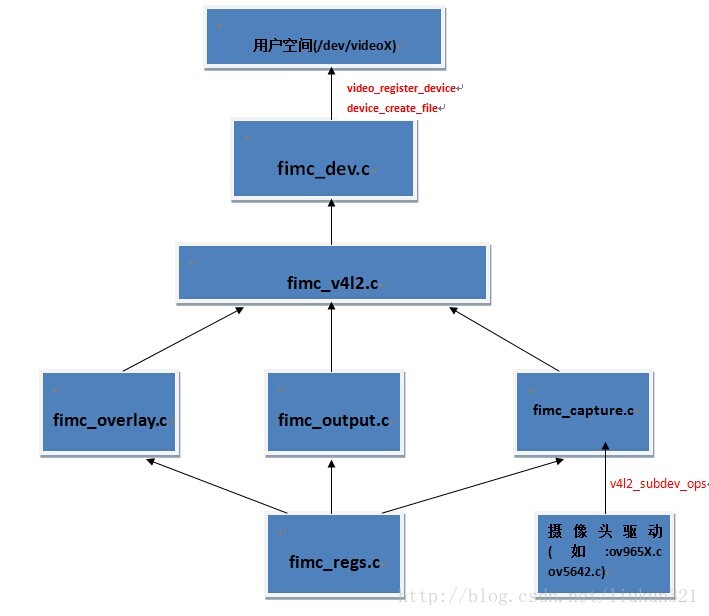
好了,框架有了,再来看源码就轻松多了
接下来,先来看看FIMC设备的注册过程。以FIMC-0为例,说说/dev/video0 这个设备文件是怎么出来的。
先看几个关键结构:
首先是 s3c_platform_fimcfimc_plat_lsi;也就是抽象fimc模块的数据结构,fimc_plat_lsi还包含了一个.camera成员。该结构初始化如下
- static struct s3c_platform_fimc fimc_plat_lsi = {
- .srclk_name = "mout_mpll",
- .clk_name = "sclk_fimc",
- .lclk_name = "fimc",
- .clk_rate = 166750000,
- #if defined(CONFIG_VIDEO_S5K4EA)
- .default_cam = CAMERA_CSI_C,
- #else
- #ifdef CAM_ITU_CH_A
- .default_cam = CAMERA_PAR_A,
- #else
- .default_cam = CAMERA_PAR_B,
- #endif
- #endif
- .camera = {
- #ifdef CONFIG_VIDEO_S5K4ECGX
- &s5k4ecgx,
- #endif
- #ifdef CONFIG_VIDEO_S5KA3DFX
- &s5ka3dfx,
- #endif
- #ifdef CONFIG_VIDEO_S5K4BA
- &s5k4ba,
- #endif
- #ifdef CONFIG_VIDEO_S5K4EA
- &s5k4ea,
- #endif
- #ifdef CONFIG_VIDEO_TVP5150
- &tvp5150,
- #endif
- #ifdef CONFIG_VIDEO_OV9650
- &ov9650,
- #endif
- },
- .hw_ver = 0x43,
- };
可以看到在s3c_platform_fimc中有一个camera成员。这里重点看一下ov9650.展开ov9650
- static struct s3c_platform_camera ov9650 = {
- #ifdef CAM_ITU_CH_A
- .id = CAMERA_PAR_A,
- #else
- .id = CAMERA_PAR_B,
- #endif
- .type = CAM_TYPE_ITU,
- .fmt = ITU_601_YCBCR422_8BIT,
- .order422 = CAM_ORDER422_8BIT_YCBYCR,
- .i2c_busnum = 0,
- .info = &ov9650_i2c_info,
- .pixelformat = V4L2_PIX_FMT_YUYV,
- .srclk_name = "mout_mpll",
-
- .clk_name = "sclk_cam1",
- .clk_rate = 40000000,
- .line_length = 1920,
- .width = 1280,
- .height = 1024,
- .window = {
- .left = 0,
- .top = 0,
- .width = 1280,
- .height = 1024,
- },
-
-
- .inv_pclk = 1,
- .inv_vsync = 1,
- .inv_href = 0,
- .inv_hsync = 0,
-
- .initialized = 0,
- .cam_power = ov9650_power_en,
- };
这个结构体,实现了对ov9650摄像头硬件结构的抽象。定义了摄像头的关键参数和基本特性。
因为fimc设备在linux3.0.8内核中作为一个平台设备加载,而上面提到的s3c_platform_fimcfimc_plat_lsi仅是fimc的抽象数据而非设备。这就需要将抽象fimc的结构体作为fimc platform_device 的一个私有数据。所以就有了下面的过程。s3c_platform_fimcfimc_plat_lsi 结构在板级设备初始化XXX_machine_init(void) 过程作为s3c_fimc0_set_platdata 的实参传入。之后fimc_plat_lsi就成为了fimc设备的
platform_data
。
- s3c_fimc0_set_platdata(&fimc_plat_lsi);
- s3c_fimc1_set_platdata(&fimc_plat_lsi);
- s3c_fimc2_set_platdata(&fimc_plat_lsi);
以s3c_fimc0_set_platdata为例展开
- void __init s3c_fimc0_set_platdata(struct s3c_platform_fimc *pd)
- {
- struct s3c_platform_fimc *npd;
-
- if (!pd)
- pd = &default_fimc0_data;
-
- npd = kmemdup(pd, sizeof(struct s3c_platform_fimc), GFP_KERNEL);
- if (!npd)
- printk(KERN_ERR "%s: no memory for platform data\n", __func__);
- else {
- if (!npd->cfg_gpio)
- npd->cfg_gpio = s3c_fimc0_cfg_gpio;
-
- if (!npd->clk_on)
- npd->clk_on = s3c_fimc_clk_on;
-
- if (!npd->clk_off)
- npd->clk_off = s3c_fimc_clk_off;
-
- npd->hw_ver = 0x45;
-
-
- npd->pmem_start = s5p_get_media_memory_bank(S5P_MDEV_FIMC0, 1);
-
- npd->pmem_size = s5p_get_media_memsize_bank(S5P_MDEV_FIMC0, 1);
-
- s3c_device_fimc0.dev.platform_data = npd;
- }
- }
最后一句是关键 s3c_device_fimc0.dev.platform_data = npd;
看一下s3c_device_fimc0定义:
- struct platform_device s3c_device_fimc0 = {
- .name = "s3c-fimc",
- .id = 0,
- .num_resources = ARRAY_SIZE(s3c_fimc0_resource),
- .resource = s3c_fimc0_resource,
- };
fimc的抽象数据,则作为它的私有数据被包含进了s3c_device_fimc0这个结构中。到这里才完成了FIMC平台设备的最终定义。这个平台设备的定义s3c_device_fimc0又被添加到了整个硬件平台的 platform_device 列表中,最终在XXX_machine_init(void) 函数中调用platform_add_devices(mini210_devices, ARRAY_SIZE(mini210_devices)); 完成所有platform_device 的注册:
- static struct platform_device *mini210_devices[] __initdata = {
- &s3c_device_adc,
- &s3c_device_cfcon,
- &s3c_device_nand,
- 。。。
- &s3c_device_fb,
- &mini210_lcd_dev,
- #ifdef CONFIG_VIDEO_FIMC
- &s3c_device_fimc0,
- &s3c_device_fimc1,
- &s3c_device_fimc2,
- }
- platform_add_devices(mini210_devices, ARRAY_SIZE(mini210_devices));
platform_device
被加载后,等待与之匹配的
platform_driver
。若此时
fimc driver
的驱动模块被加载。这个时候,
fimc_dev.c
文件里的
static int __devinit fimc_probe(structplatform_device *pdev)
函数上场了。
- static int __devinit fimc_probe(struct platform_device *pdev)
- {
- struct s3c_platform_fimc *pdata;
- struct fimc_control *ctrl;
- struct clk *srclk;
- int ret;
- if (!fimc_dev) {
- fimc_dev = kzalloc(sizeof(*fimc_dev), GFP_KERNEL);
- if (!fimc_dev) {
- dev_err(&pdev->dev, "%s: not enough memory\n",
- __func__);
- return -ENOMEM;
- }
- }
-
- ctrl = fimc_register_controller(pdev);
- if (!ctrl) {
- printk(KERN_ERR "%s: cannot register fimc\n", __func__);
- goto err_alloc;
- }
-
- pdata = to_fimc_plat(&pdev->dev);
- if (pdata->cfg_gpio)
- pdata->cfg_gpio(pdev);
-
- #ifdef REGULATOR_FIMC
-
- ctrl->regulator = regulator_get(&pdev->dev, "pd");
- if (IS_ERR(ctrl->regulator)) {
- fimc_err("%s: failed to get resource %s\n",
- __func__, "s3c-fimc");
- return PTR_ERR(ctrl->regulator);
- }
- #endif //REGULATOR_FIMC
-
- srclk = clk_get(&pdev->dev, pdata->srclk_name);
- if (IS_ERR(srclk)) {
- fimc_err("%s: failed to get source clock of fimc\n",
- __func__);
- goto err_v4l2;
- }
-
-
- ctrl->clk = clk_get(&pdev->dev, pdata->clk_name);
- if (IS_ERR(ctrl->clk)) {
- fimc_err("%s: failed to get fimc clock source\n",
- __func__);
- goto err_v4l2;
- }
-
-
- clk_set_parent(ctrl->clk, srclk);
-
-
- clk_set_rate(ctrl->clk, pdata->clk_rate);
-
-
- ret = v4l2_device_register(&pdev->dev, &ctrl->v4l2_dev);
- if (ret) {
- fimc_err("%s: v4l2 device register failed\n", __func__);
- goto err_fimc;
- }
-
-
- if (!fimc_dev->initialized) {
- ret = fimc_init_global(pdev);
- if (ret)
- goto err_v4l2;
- }
-
-
- ret = video_register_device(ctrl->vd, VFL_TYPE_GRABBER, ctrl->id);
- if (ret) {
- fimc_err("%s: cannot register video driver\n", __func__);
- goto err_v4l2;
- }
-
- video_set_drvdata(ctrl->vd, ctrl);
-
- ret = device_create_file(&(pdev->dev), &dev_attr_log_level);
- if (ret < 0) {
- fimc_err("failed to add sysfs entries\n");
- goto err_global;
- }
- printk(KERN_INFO "FIMC%d registered successfully\n", ctrl->id);
-
- return 0;
-
- err_global:
- video_unregister_device(ctrl->vd);
-
- err_v4l2:
- v4l2_device_unregister(&ctrl->v4l2_dev);
-
- err_fimc:
- fimc_unregister_controller(pdev);
-
- err_alloc:
- kfree(fimc_dev);
- return -EINVAL;
-
- }
在fimc_probe函数中有这么一段
- if(!fimc_dev->initialized) {
- ret = fimc_init_global(pdev);
- if (ret)
- goto err_v4l2;
- }
这段代码执行过程:首先判断fimc是否已经被初始化完成(此时FIMC是忙状态的),如果没有被初始化,则执行fimc_init_global(pdev);函数,它的作用是先判断平台数据中是否初始化了摄像头结构(即前面提到的.camera成员),从平台数据中获得摄像头的时钟频率并将平台数据中内嵌的s3c_platform_camera结构数据保存到该驱动模块全局的fimc_dev中,感兴趣的朋友可以展开这个函数看一下,这里就不再贴出来了。
紧接着这段代码还执行了两个非常关键的过程:
- ret= v4l2_device_register(&pdev->dev, &ctrl->v4l2_dev);
- if (ret) {
- fimc_err("%s: v4l2device register failed\n", __func__);
- goto err_fimc;
- }
这个函数里的核心完成了对v4l2_dev->subdev链表头的初始化,并将ctrl->v4l2_dev关联到pdev->dev结构的私有数据的driver_data成员中(即完成了pdev->dev->p->driver_data= ctrl->v4l2_dev; ),也就是实现了v4l2_dev向内核结构注册的过程。
- ret= video_register_device(ctrl->vd, VFL_TYPE_GRABBER, ctrl->id);
- if (ret) {
- fimc_err("%s: cannotregister video driver\n", __func__);
- goto err_v4l2;
- }
-
- video_set_drvdata(ctrl->vd, ctrl);
-
- ret = device_create_file(&(pdev->dev),&dev_attr_log_level);
上面的过程完成了对video_device 设备的注册,并且在sys 目录下生成了对应的属性文件。如果系统中移植有mdev,将会生成对应设备节点/dev/videoX。
其实到目前为止,只完成了fimc设备主要数据结构的初始化和注册,几乎没有操作fimc或摄像头的硬件寄存器。也没有完成FIMC驱动和摄像头的驱动模块的软件关联。我们是如何做到仅操作fimc的设备节点/dev/videoX就能控制摄像头设备的效果呢?下回分解吧。。。






















 7386
7386











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









