






产品目录
1.产品特性
这是一款多功能高性能高转速闭环驱动器,支持脉冲、总线、其他控制模块多种方式控制,主控采用主流单片机,主频达72Mhz,例程资源丰富,方便扩展模块开发,8-24V宽电压供电,持续电流3A,峰值电流可达3.5A,1-256细分任意设置,采用先进的PWM恒流驱动技术,不发热,低噪音,驱动器预留有SPI、ADC和外部编码器等信号接口,以适应更多用途
1.1产品参数 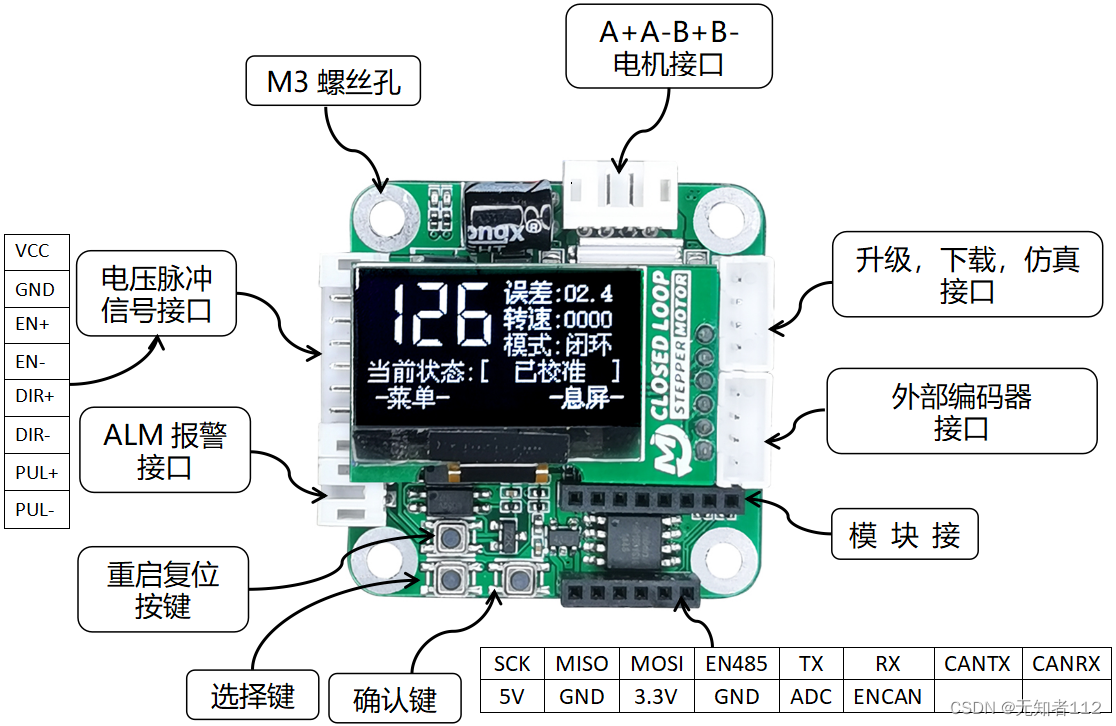

2.安装调试
2.1安装
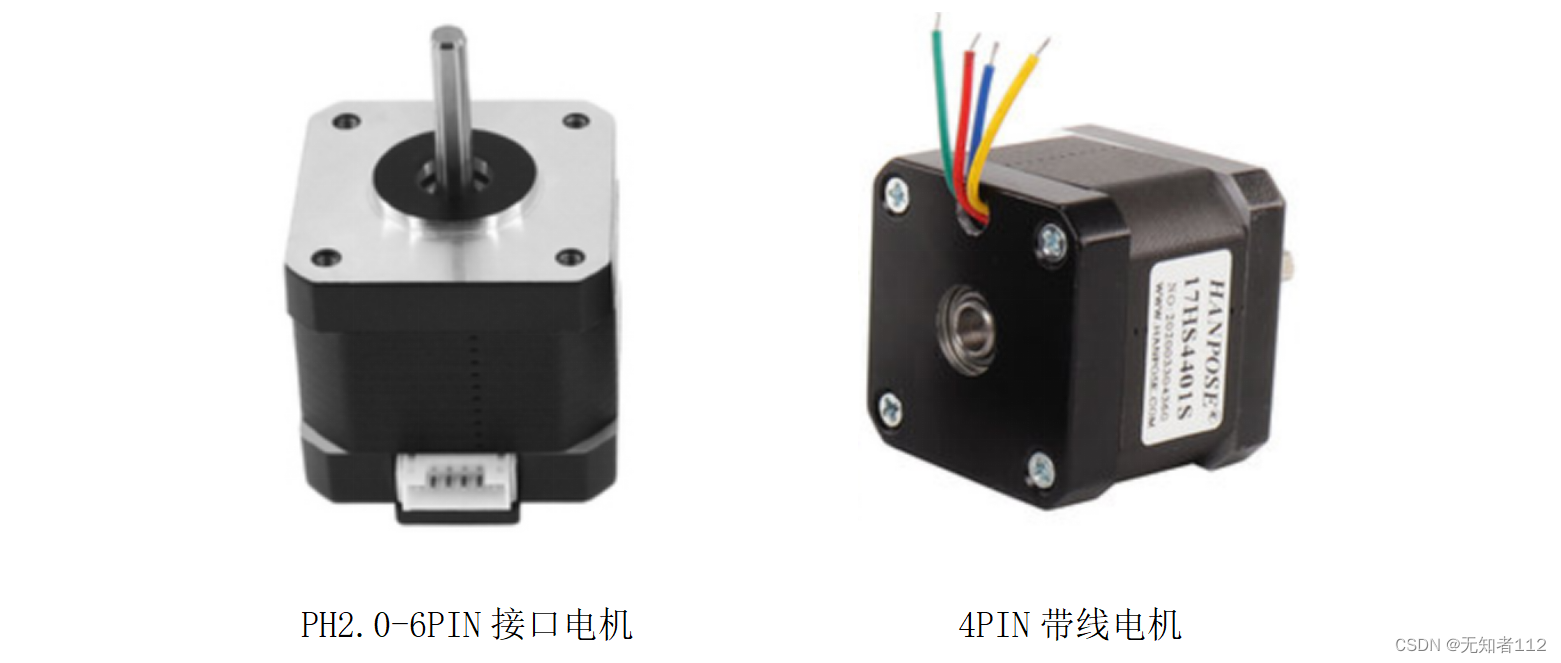
安装时需准备(PH2.0-4P转6P线用于不带线步进电机)、M3螺丝(螺丝长度和电机一样长)、3MM尼龙塑料垫片、6x5径向磁铁(宽x厚,磁铁厚度根据实际情况选择,磁铁距离编码器小于2MM),步进电机选择2相4线1.8步距角42步进电机,电机厚度任意,电机最好选择带磁柱闭环专用电机,便于磁铁的安装

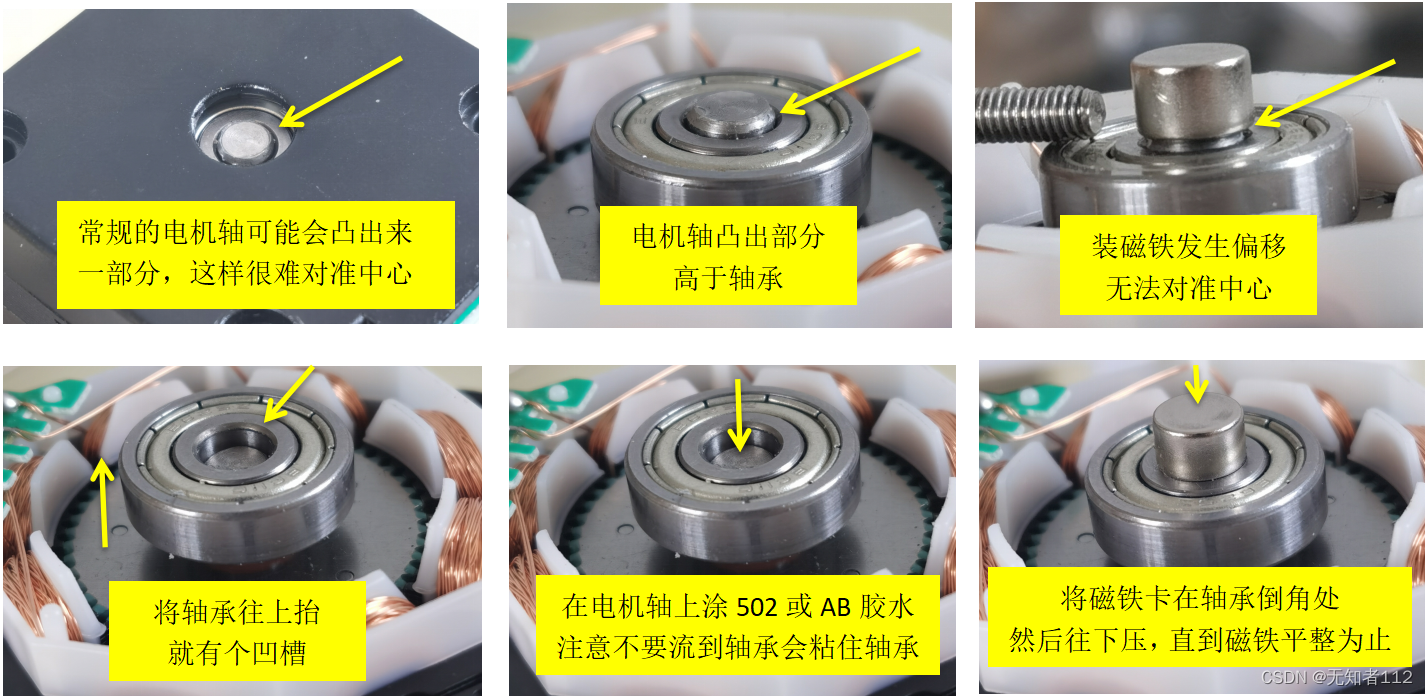
首先将磁铁放到磁柱中,没有磁柱的电机可以在磁铁上涂抹502胶水,粘到电机轴上,切记一定要涂抹在磁铁上,不要滴胶水到轴上,胶水会留到轴承上导致电机卡死,能用胶水就不要用双面胶,双面胶粘不牢,电机旋转会甩掉磁铁,导致编码器数据错误
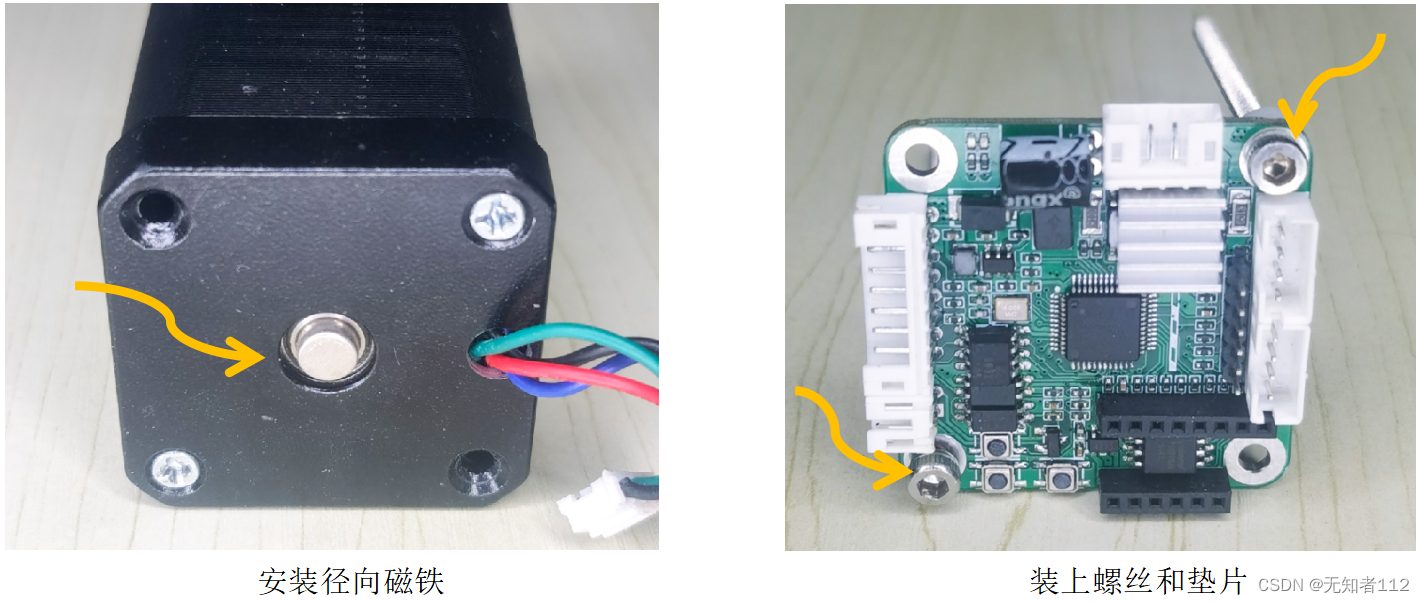
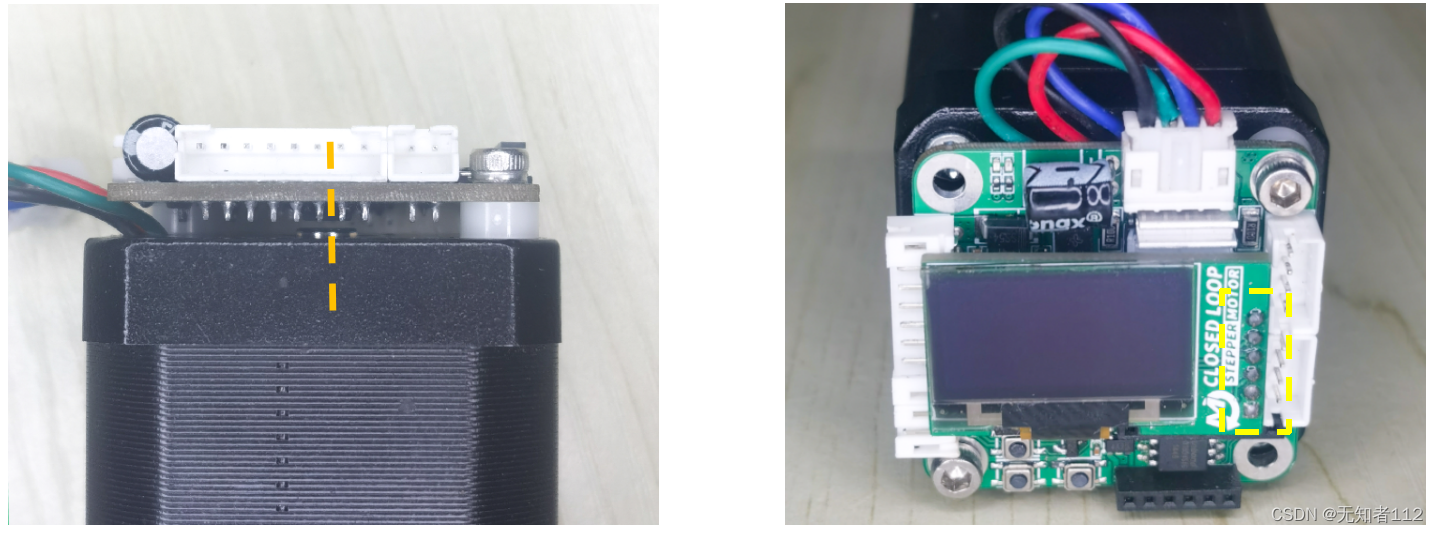
安装驱动器时可从侧面观察磁铁是否对准编码器中间,没有对准微调即可,完成后插上屏幕,屏幕要对好排针
2.2、磁铁安装
对于带磁柱的电机安装磁铁非常简单,直接插入磁铁即可,在此不过多叙述,由于带磁柱成本比不带磁柱的电机贵,为了降低成本,以下为不带磁柱电机安装磁铁的方法
2.3调整电机线序
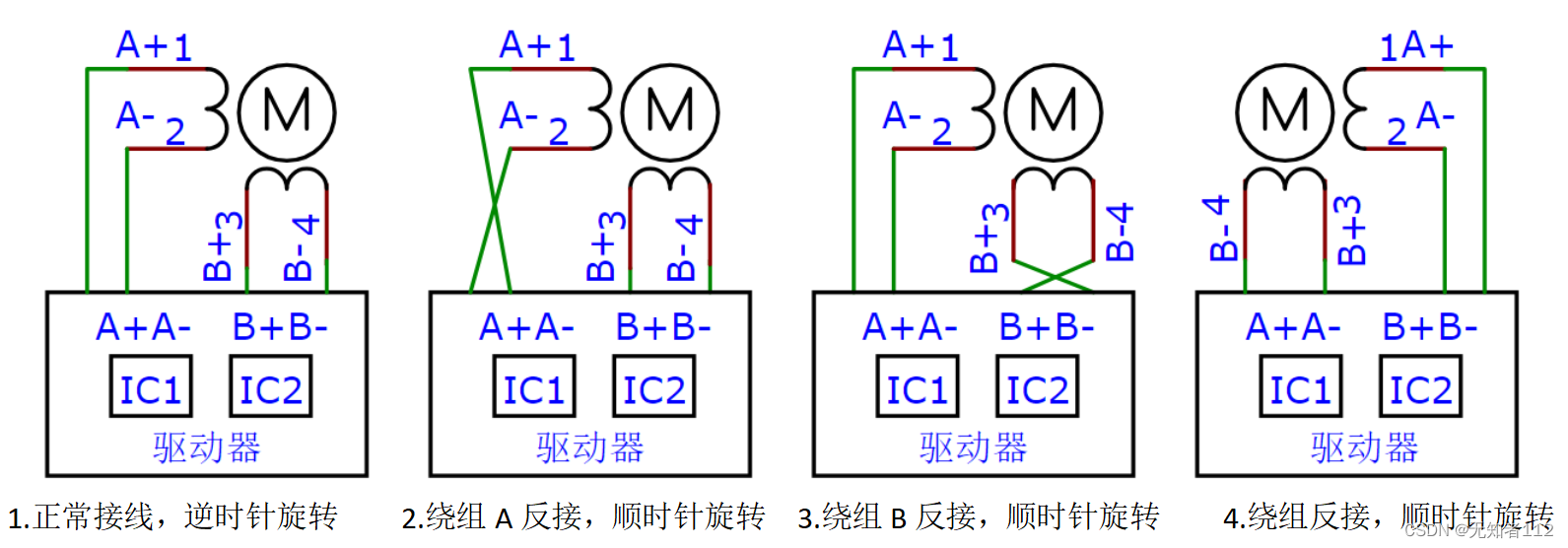
由于每个厂家电机线序定义有所不同,在接驱动器时最好电机线序和驱动器线序一致,如果没有电机定义资料可用万用表测出电机绕组,2相4线有两个绕组AA和BB,有阻值为一个绕组,驱动器一个IC驱动一个绕组,绕组接对都没问题,如果校正时抖动不转,说明绕组接反了,一个绕组左转一个绕组右转,原地不动堵转了,其中一个绕组反接即可
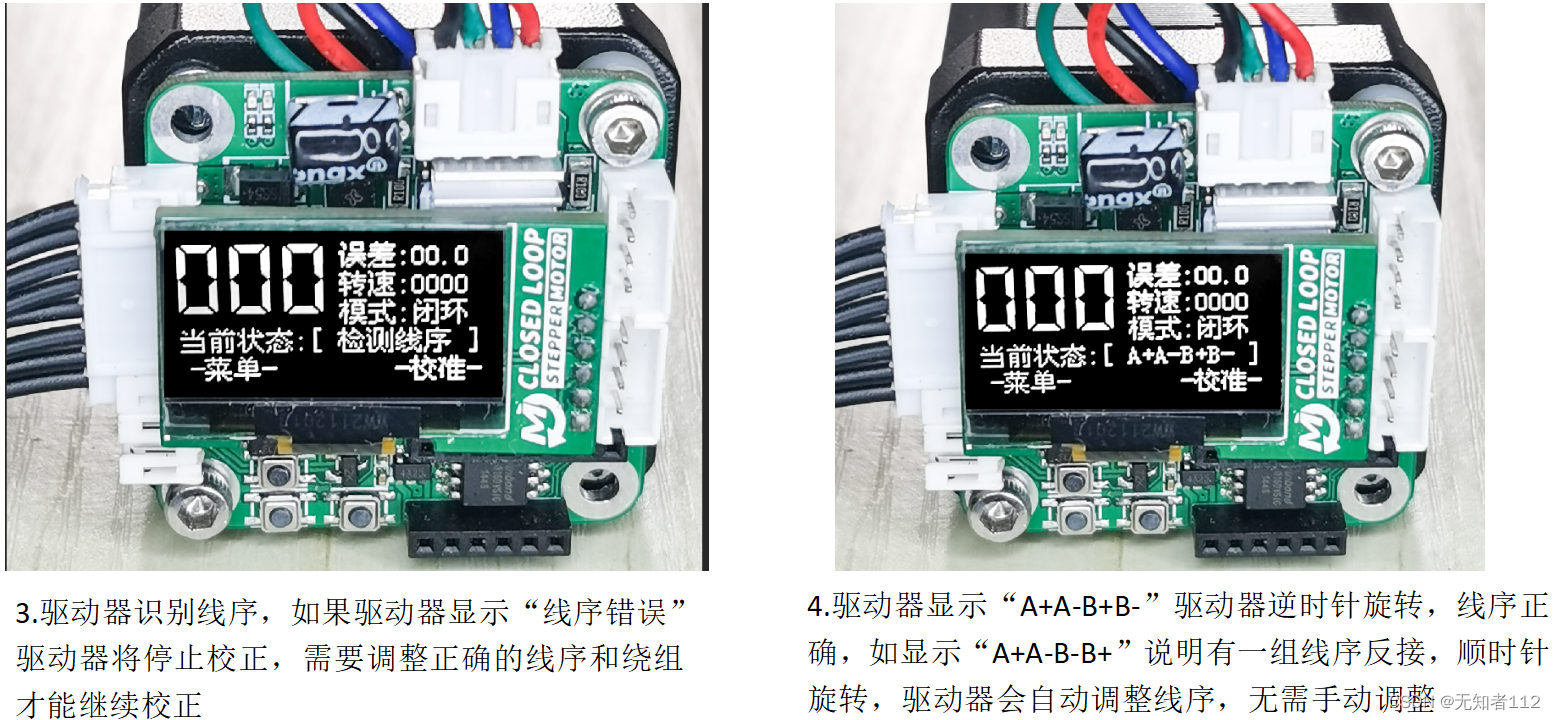
 以下为电机与驱动器的正确接法,只要绕组能对应,接反了电机反转,驱动器会自动调整线序,如果绕组接错了驱动器会提示“线序错误”将停止校正步骤,如果调整好线序还提示错误请检查电机连接线是否有接触不良,端子经常插拔会松动、氧化导致接触不良
以下为电机与驱动器的正确接法,只要绕组能对应,接反了电机反转,驱动器会自动调整线序,如果绕组接错了驱动器会提示“线序错误”将停止校正步骤,如果调整好线序还提示错误请检查电机连接线是否有接触不良,端子经常插拔会松动、氧化导致接触不良
2.4校正调试
首次使用需要校正一次驱动器(驱动器显示“未校正”驱动器工作在开环状态),读取磁铁的角度,校正完成后自动保存角度数据无需再次校正,如果校正完成后拆卸驱动器就需要重新校正,移动驱动器会导致编码器和磁铁有偏差,电机工作时因角度误差震动,务必固定好驱动器,避免驱动器晃动,校正方法如下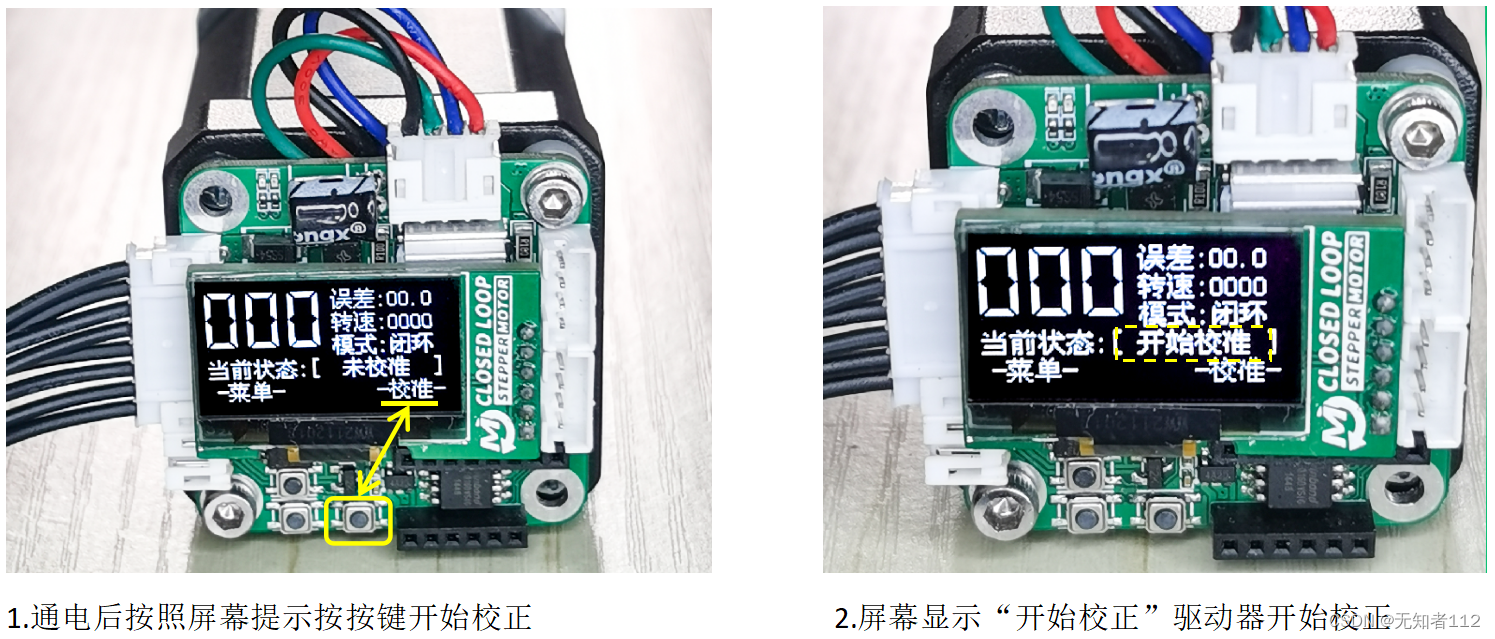

4.校正完成后驱动器显示“已校正”角度信息显示358度,如果显示不在354-360说明校正识别失败,校正完成不代表校正成功,手动旋转电机查看电机是否自动归位,如果旋转不动可降低电流再操作,如果旋转电机没有归位,电机狂转校正失败,如果电机没有锁定有轻微转动,说明校正完成后驱动器有移动导致角度有偏差
3.驱动器接线图
3.1典型接线图
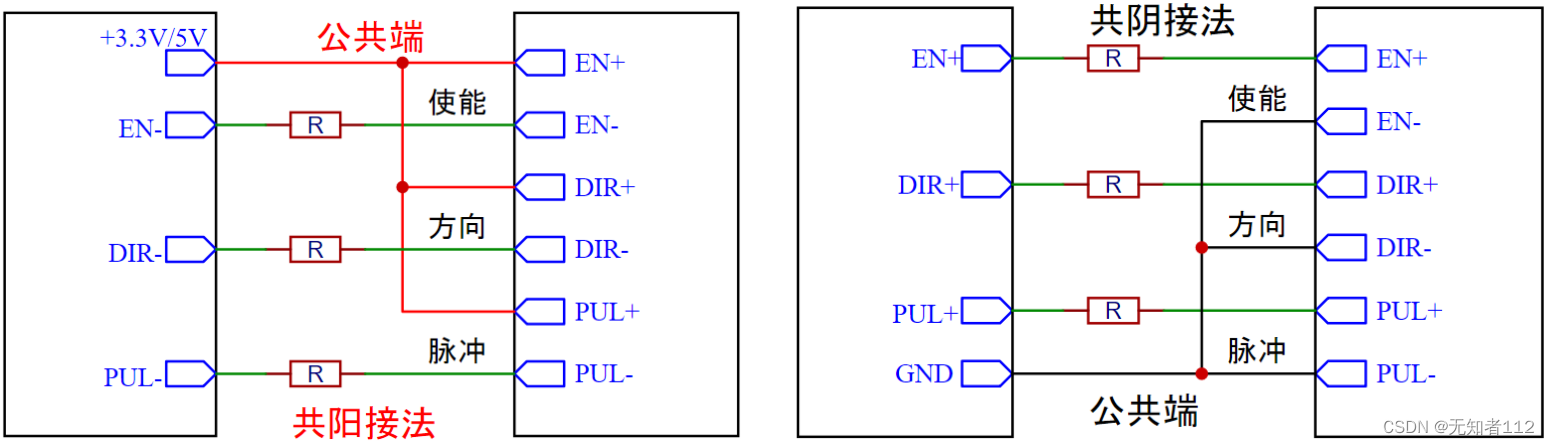
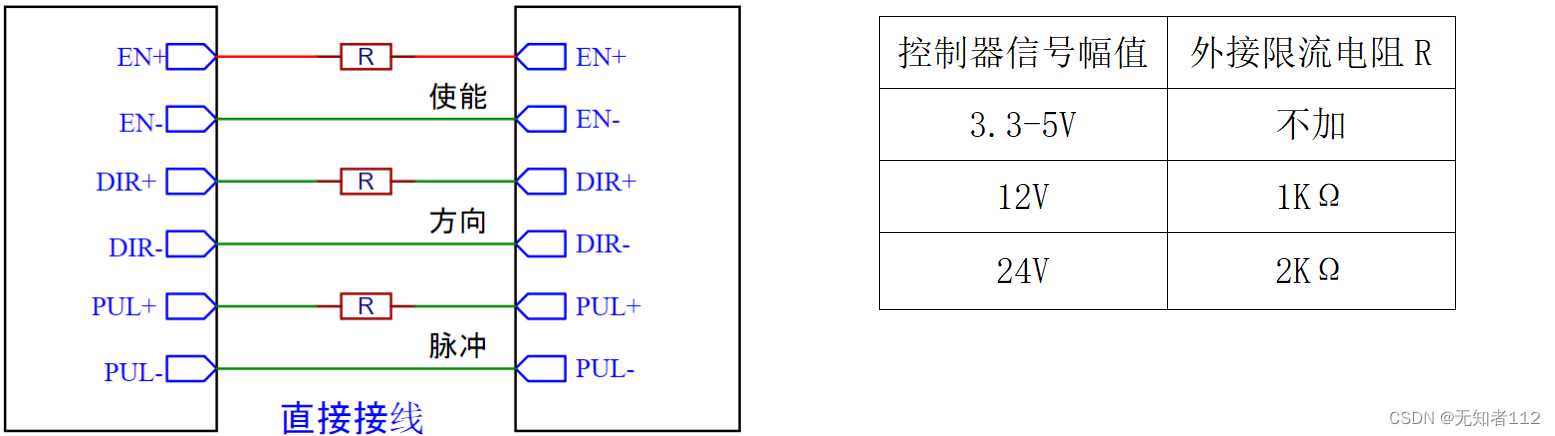
脉冲控制接线推荐共阴或共阳接法,可节省布线,EN使能可接也可不接,EN用于脱机,脱机信号可触发电机停止工作,其中R电阻如果是3.3和5V信号无需加电阻,如果是12-24V需加电阻限流保护光耦
3.2 ALM报警接线图
AML报警信号输出用于驱动器故障停机堵转等输出报警信号,控制大电流大电压可外接继电器、MOS管、SSR继电器等,小信号控制其他单片机输出可直接输出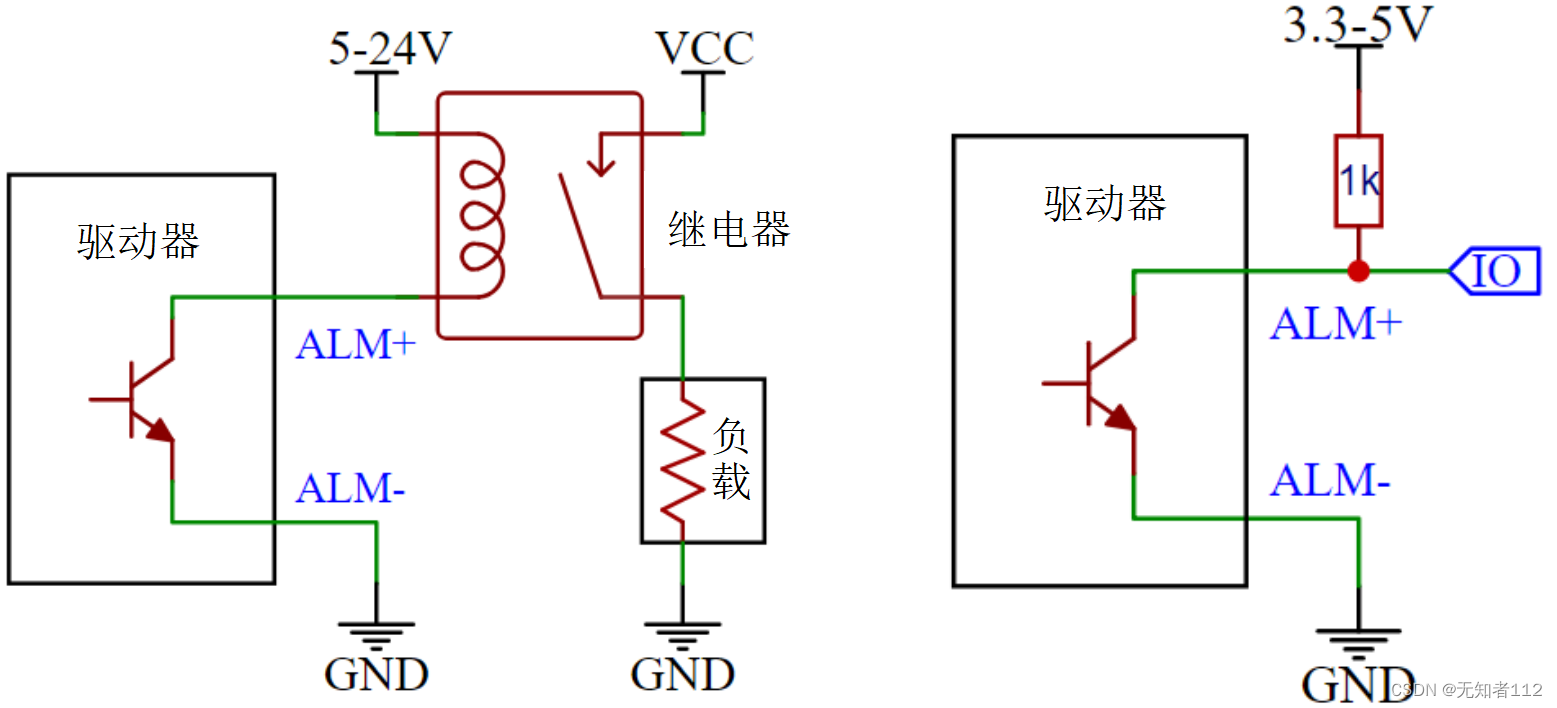 1.大电流大电压信号输出接法,驱动器内部MOS管耐压60V-600MA
1.大电流大电压信号输出接法,驱动器内部MOS管耐压60V-600MA
2.小电压小电流信号输出接法,直接控制IO
3.3 外部编码接线
外接编码器需在菜单里将编码器设置为外部,将外部编码器接线即可,外部编码器模块可根据自己需求设计PCB电路板尺寸打板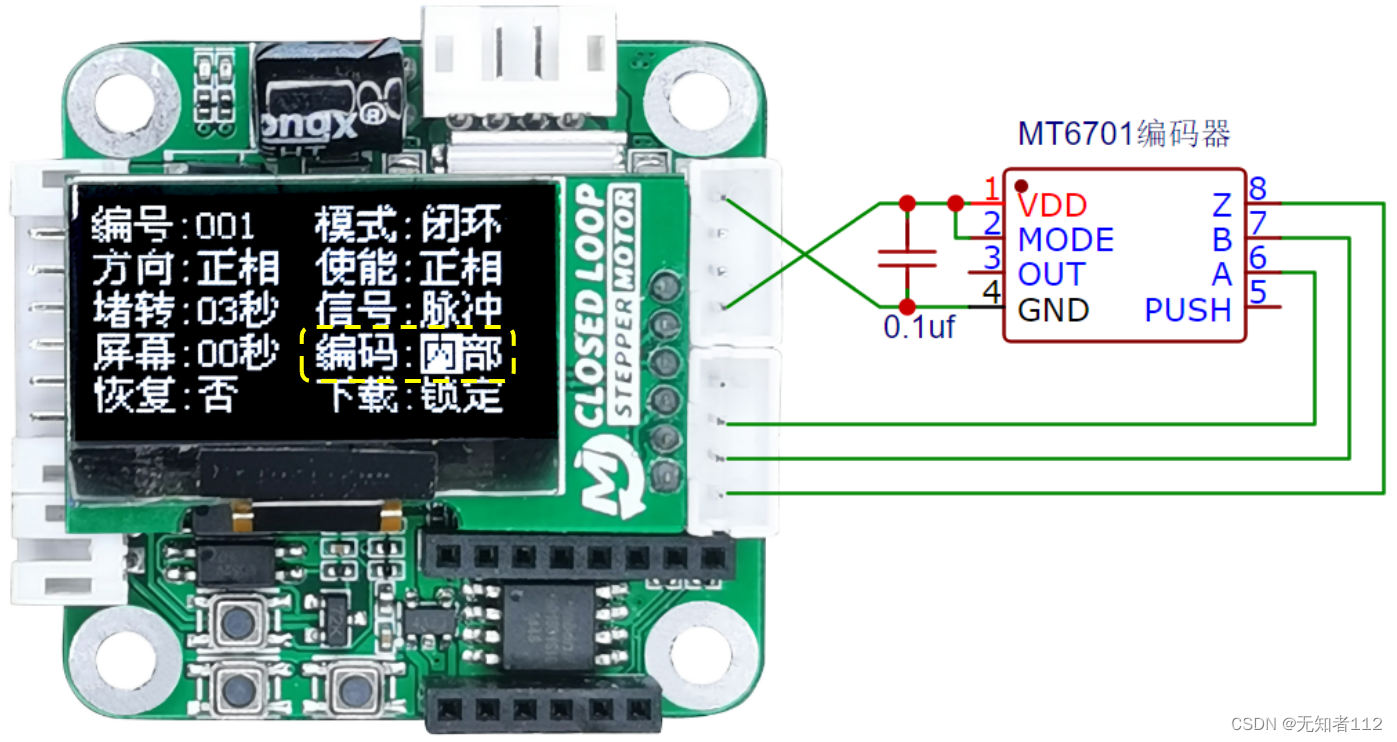
3.4 RS485接线图
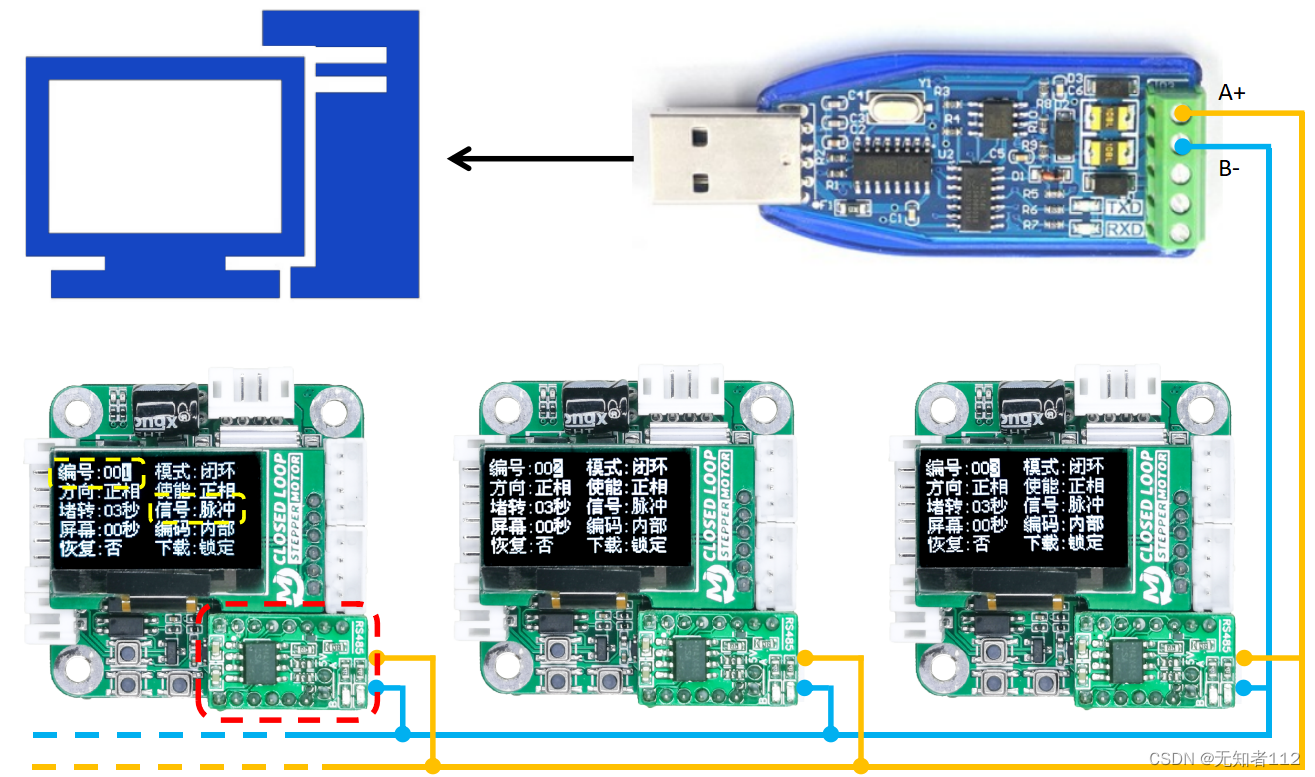
使用RS458需将RS485模块插上,根据上图接线即可,AB对应,如只改参数,设定驱动器编号即可,如需要控制驱动器,请把信号控制改为458保存即可,一般转换模块带电阻不需要接电阻,如果转换模块不带电阻,无法正常通讯可在总线上接电阻
4.功能设置
4.1 PID控制介绍
1、什么是PID(比例、积分和微分)
PID通俗解释如下图,你今天心情好,开车出门旅行,上车就想起飞直接干到120km/h,把油门干到底车子急加速到了120km/h,如果你觉得太伤车了,想缓慢起步,PID就可以控制力度,缓慢加速或者急加速,当你加速到120km/h高速飞奔,突然你发现路上有个大坑,你想刹车,车子停下需要为0km/h,由于车子惯性想要从120km/h直接达到0km/h是不可能的,这时我们就需要PID控制提前刹车,控制刹车的力度,要多少距离停下都可以控制,力度太大就就急刹,力度小刹车距离就远
PID控制器的三个最基本的参数:kP、kI、kD,P、I、D是三种不同的调节作用,既可以单独使用(P、I、D),也可以两个两个用(PI、PD),也可以三个一起用(PID)
1、kP
kP就是比例的意思,它的作用最明显,原理也最简单,就是让车子从0km/h加速到120km/h,当车速快到120km/h时,kP就会缓慢加速,超过120就停止加速,低于120又继续加速,保持在120范围
2、kI
kI积分的作用就是,减小静态情况下的误差,让受控物理量尽可能接近目标值,比如车子加速到120km/h,你把握不好油门力度,车子一会115一会126,这时就需要kI控制在120减少误差,或者车子从120km/h减速到0km/h控制在50米,但是总是把握不好力度,不是46米没达到或者58米超过了,这时调节kI尽量控制在50米减少误差
3、kD
kD微分的作用就是让物理量的速度趋于0,参数越大,向速度相反方向刹车的力道就越强
如果以上解释还不明白,自行上百度查询消化,这里不过多解释,PID调节需根据实际情况调节
4.2 细分设定
驱动器支持1-256细分任意调节,1.8度42步进电机200个脉冲转一圈,1细分200脉冲,16细分就是16X200=3200脉冲,32就是6400脉冲,其他细分也是乘以200与常规驱动器细分一致
4.3 电流设定
驱动器峰值电流为3.5A,为了留有余量,驱动器最大电流为3.2A,电流根据实际情况调节,一般闭环根据负载自动调节电流,发热低,所以闭环模式设置为最大电流也没问题,高转速需要设置为最大电流,高转速是以电流在跑
4.4 低通滤波设定
低通滤波消除高频噪声,降低电机噪音,不懂请保持默认值
4.5 设备地址设定
设备地址总线通信中设备识别的唯一ID,总线控制哪个驱动器就发送指令给哪个地址
4.6 模式设定
模式设定分为闭环和开环,闭环具有自动修正角度、防止丢步、高转速、低发热、静音的特点,开环与普通驱动器一致
4.7 方向使能设定
当控制器不能设置方向时,可在驱动器里设置反向旋转信号,控制信号发出正转信号,驱动器设置反相,信号会将信号反转,电机会反方向旋转,使能信号控制驱动器脱机,当使能信号触发驱动器会停止工作,电机释放可任意转动电机,如果通电电机没反应可能使能信号高电平,设置反相为低电平触发
4.8 堵转保护设定
堵转设定是为了保护电机卡住时无法转动产生大电流过热损坏驱动器,设置时间是为了避免瞬间启动产生大电流误触发,高转速时电机需要大电流在跑,误触发可将堵转保护关闭,0秒为关闭
4.9 屏幕时间设定
屏幕时间为0-12秒,可根据实际情况设定,0秒为不息屏
4.10 编码器设定
编码器可设置为内部和外部,外接编码器时需要将编码器设置为外部
4.11 恢复初始数据
如果驱动器数据调乱,或者重新需要校正驱动器,恢复初始数据可将设置参数恢复初始值
4.12 外部ROM下载
外部ROM下载用于更新外部ROM数据,一般情况使用不到
4.13、波特率设置
485通讯速率,设置要对应,否则接收信息会乱码
5.控制设置
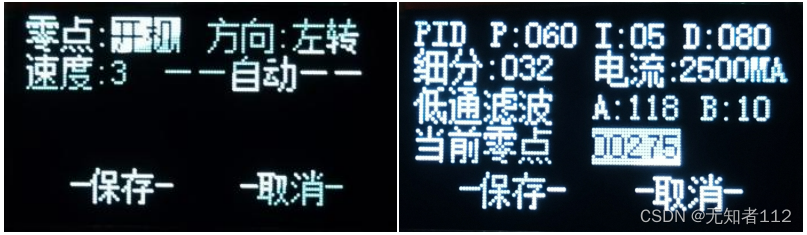
5.1开机零点
当零点模式设置为开机时,驱动器每次上电开机都会转动到设置的零点角度,每次开机只生效一次,注意必须在参数界面里更新零点的数据才能生效,否则驱动器无法找到零点将会无限旋转,注意零点的方向和速度,速度和细分会相应影响,细分越大需要的步数越多,所以越慢,此时需要把速度提高
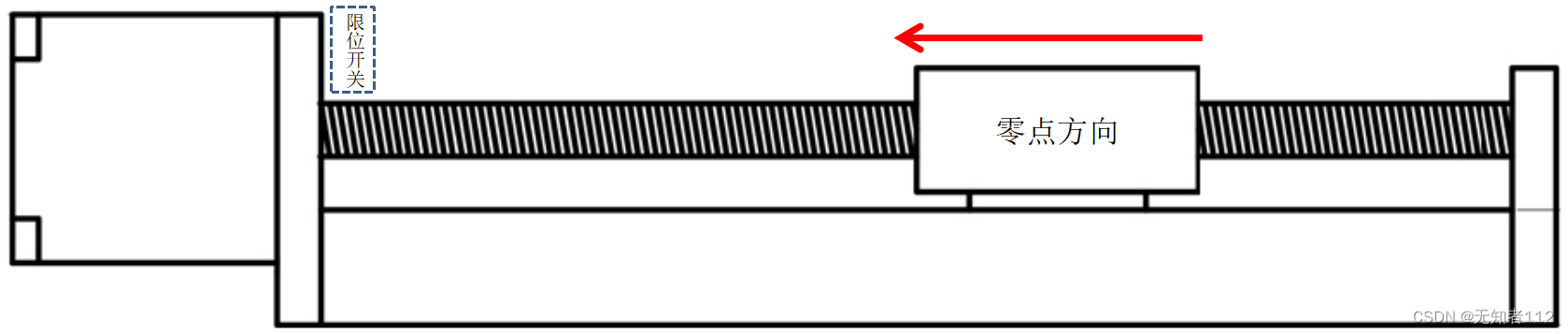
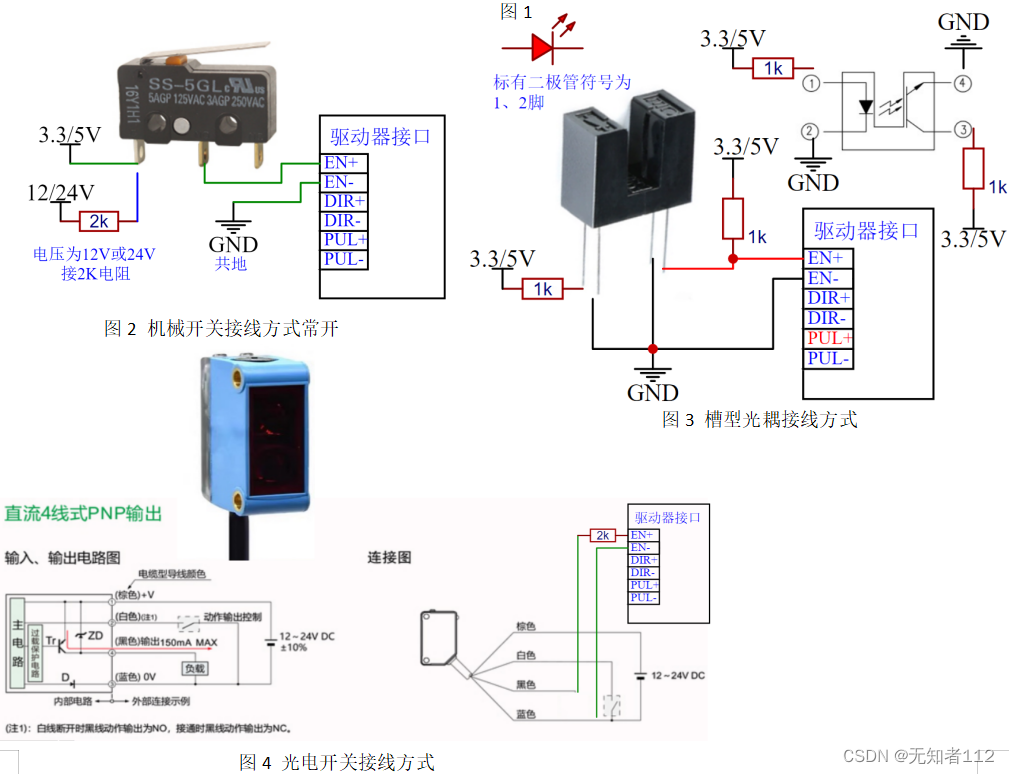
5.2、零点限位
当零点模式设置为限位时,驱动器每次开机都会往设定的方向触碰零点开关,直到触碰开关后停止,从限位开关处为零点,每次开机只生效一次,限位开关支持机械开关、光电开关、距离开关等,注意设置为零点限位后使能接口将失效,由使能变为限位开关触发接口,接线方法如图234
5.2、触发零点
当零点模式设置为限位时,发送指令可以让电机回到零点,RS485控制有效
左转回零 01 E0 00 16 00 00 61 D8 右转回零 01 E0 00 17 00 00 30 18
最近回零 01 E0 00 18 00 00 00 1B 零点更新 01 E0 00 18 00 00 00 1B
更多功能请使用上位机操作
5.3、堵转零点
当零点模式设置为堵转时,电机开机堵转停止将此位置设为为零
6.MODBUS协议格式
6.1 设备通讯说明
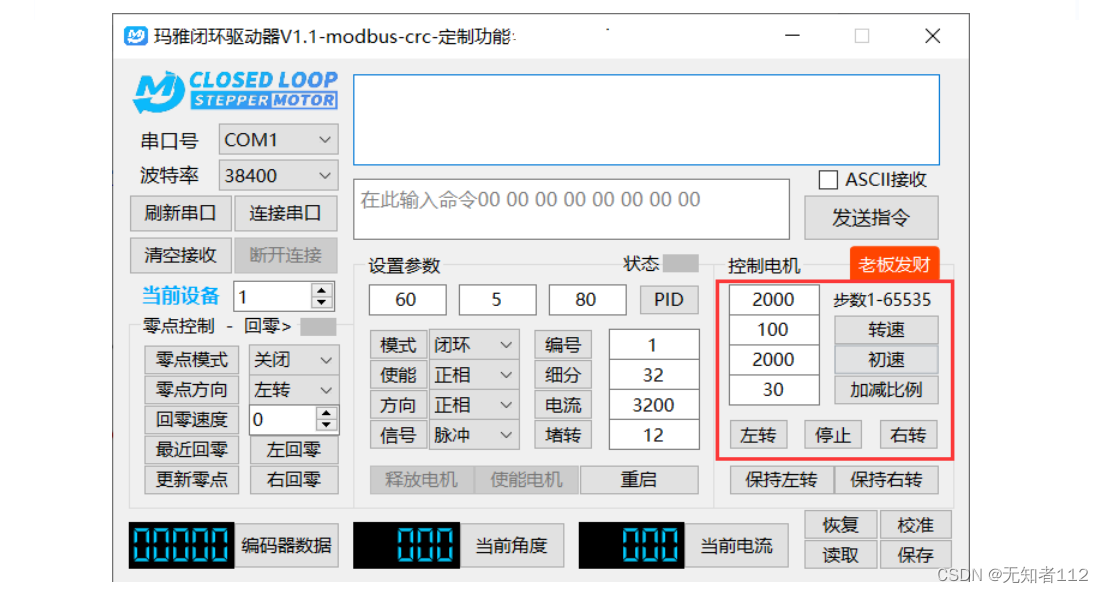
总线控制需要安装串口调试助手,485和串口通讯协议层都是一样的,只不过为了信号传输得更远更稳定,物理层将TTL电平转换成rs485电信号,其实就是信号转换器,通讯协议都是一样,当做串口使用即可,安装好助手后先检查USB转485通讯模块驱动是否安装好,然后第一步将驱动器上rs485模块插好,把USB转485通讯模块与驱动器接好线再通电,打开串口调试助手,选择波特率和端口号,打开串口,按下驱动器重启键,此时会反馈串口正常的信息说明通讯正常,接下来勾选HEX发送,有的串口助手没有这个选项,一般会有16进制发送,勾选即可,再按照协议发送,这里发送的是查询使能的信息,返回OK信息说明驱动器已经收到,再返回查询的信息,最好将自己常用的协议保存在右侧即可,这样下次就不用反复查协议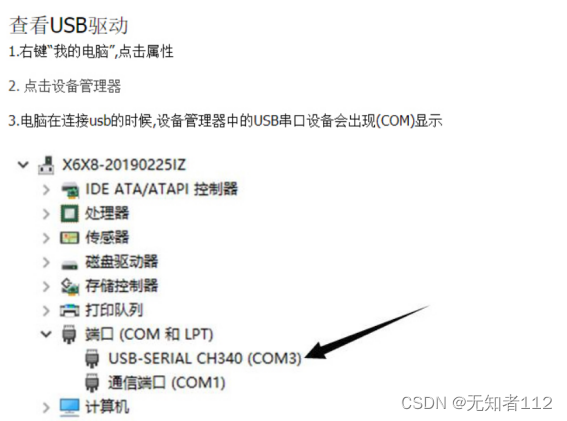
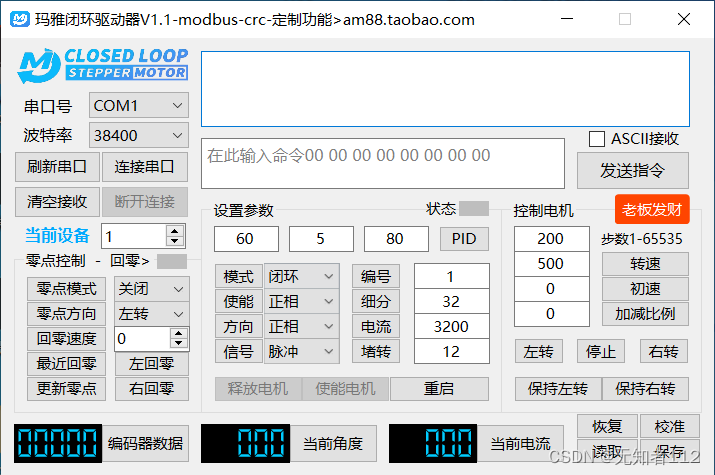
建议使用上位机
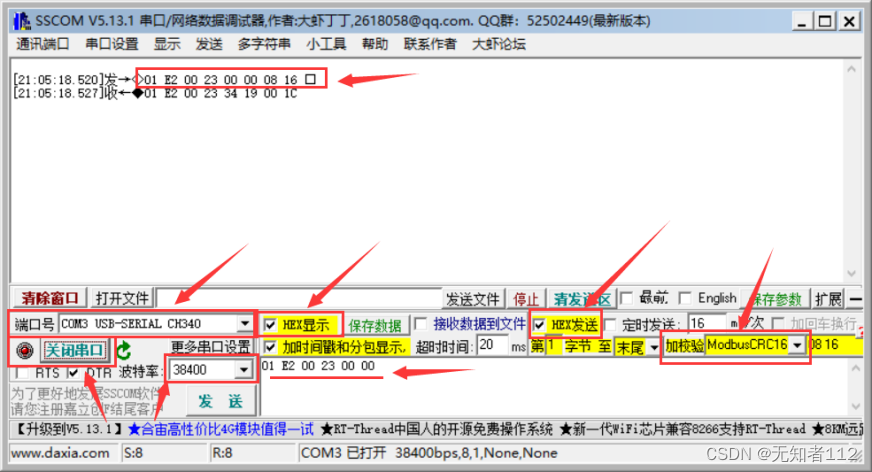
串口助手自带modbusCRC16效验,报文无需添加CRC效验,软件会自动算出效验
modbus-CRC-16协议格式解析

1.设备地址:可以在菜单中>系统>编号查看,例如设备地址为001,那么先将1转换为16进制,十进制1转换十六进制为1那么设备地址为01
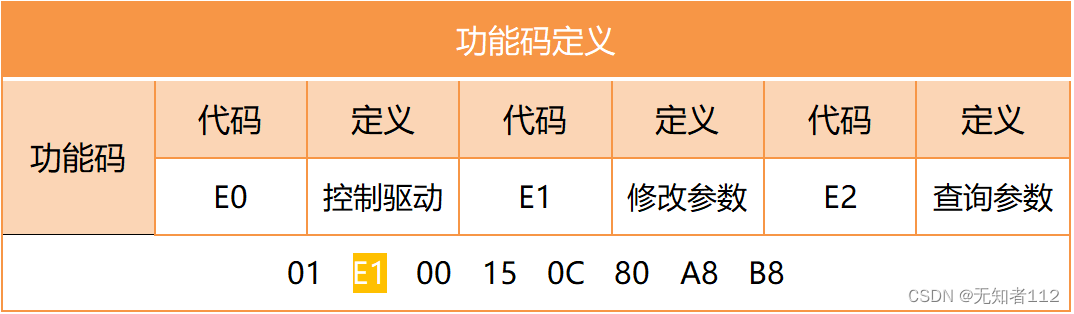
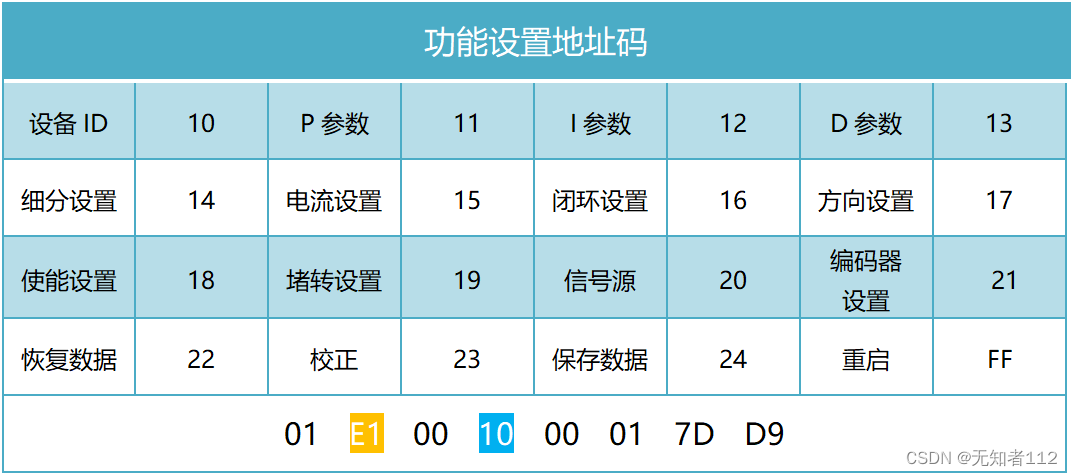
2.修改参数的功能码为E1,查询参数的功能码为E2,详细请参考报文定义表
3.地址高8位:可设置0-255任意数值,自定义数值可以避免与其他设备冲突
4.地址低8位:为功能设置地址码,如设置电流,细分的地址码为13,那么设置为13
5.数据高8位:因为8bit十六进制最大值为FF,十进制为255,如果大于这个数值需要再增加8位,那么8bit+8bit可以得到最大值为FFFF,十进制为65535,所以分为高8位和低8位
6.数据低8位,如果设置细分为256,将256转换为十六进制,那么得到100,低8位最大是FF,那么低位是00,剩下1只能放到高位,没有数值补0,那么高位为01,高位+低位就是01 00
7.CRC-16校验:效验是为了检测帧数据是否错误,CRC校验可以利用CRC校验工具进行计算
例如16进制数据:01 E1 00 13 01 00,计算的结果为894D,注意高低位

6.3 MODBUS代码定义



6.4 MODBUS代码示例
驱动控制
相对定位指令,控制电机左转一圈,设置代码如下
已知步进电机一圈200,将200转换为16进制,一个脉冲就是1步
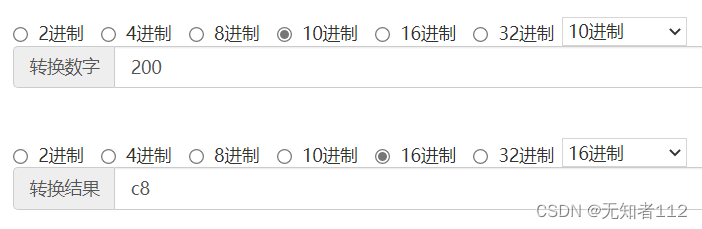
将报文进行CRC-16/MODBUS计算
保持左转指令,控制电机一直左转,只有发送停止指令才停止

当前指令为“左转+转速0.1秒(100毫秒)一圈”,如果转速数据为00 00 将不更新转速,电机转动过程也可以直接发送转速指令调节转速
转速指令和时间计算

当前指令为“调节转速1秒一圈(1细分)”,时间计算如下
1/200=0.005 已知1细分转一圈为200步,1秒除以200等于每步多少毫秒,将0.005秒换算成毫秒,换算的结果为5毫秒

现在知道走每步需要多少毫秒了,再将时间换算成脉冲频率,驱动器主频为72000000,为了方便计算,已经分频为1000000hz,1hz为1秒,但是我们需要5毫秒,先将时间换算为频率,换算结果为200hz是5毫秒
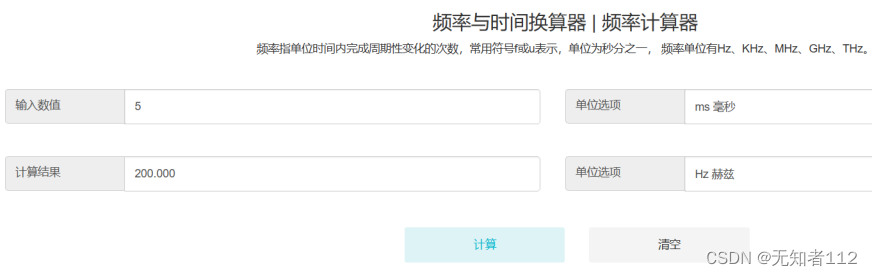
然后将分频1000000除以5000就是200hz(1000000/5000=200),我们发送5000就可以得到200hz(5毫秒)走1步,走200步就是1秒一圈,其他细分步数不一样通过此方法计算即可
功能参数设置
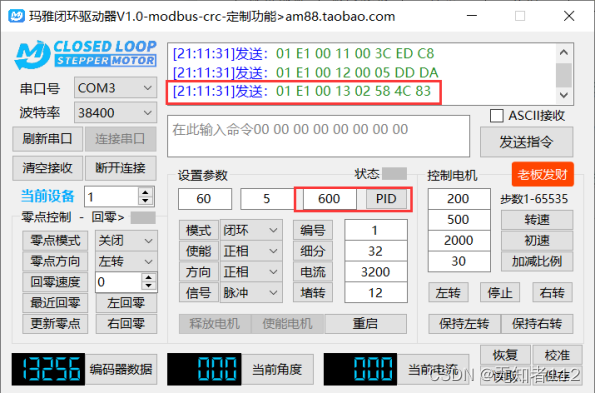
设置PID,设置D值为600,代码如下

将600换算为16进制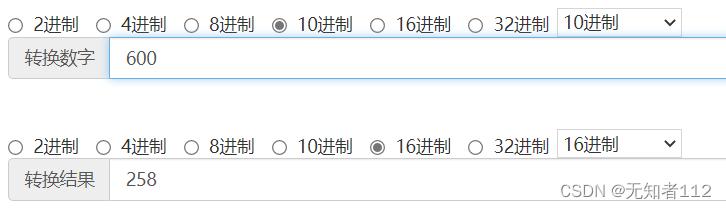
查询参数
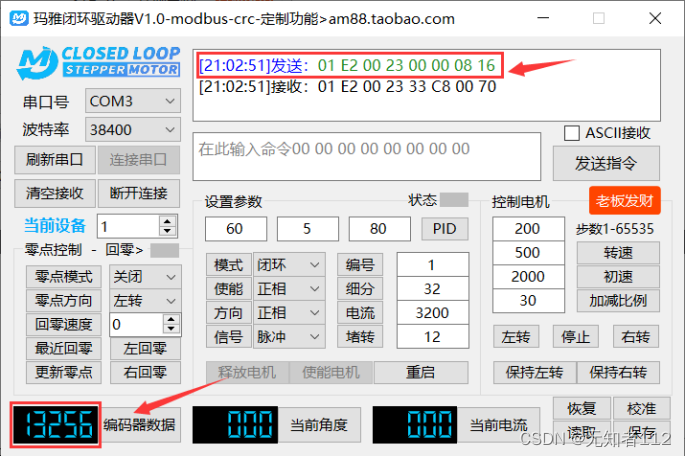
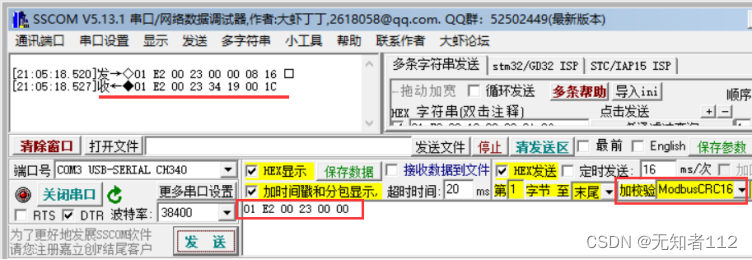
查询编码器数据,代码如下

6.5 工具地址
上位机下载
https://wwaaa.lanzoum.com/iEhJ910vjqle 密码:6o3a
Modbus通讯CRC-16校验码在线计算器
http://www.ip33.com/crc.html
串口调试助手
https://blog.csdn.net/jiesunliu3215/article/details/108405567在线二进制、十进制、16进制转换
https://www.matools.com/hex 在线进制转换
https://tool.oschina.net/hexconvert/
在线十进制转换器
https://jisuan5.com/hexadecimal/
7.1、加减速控制
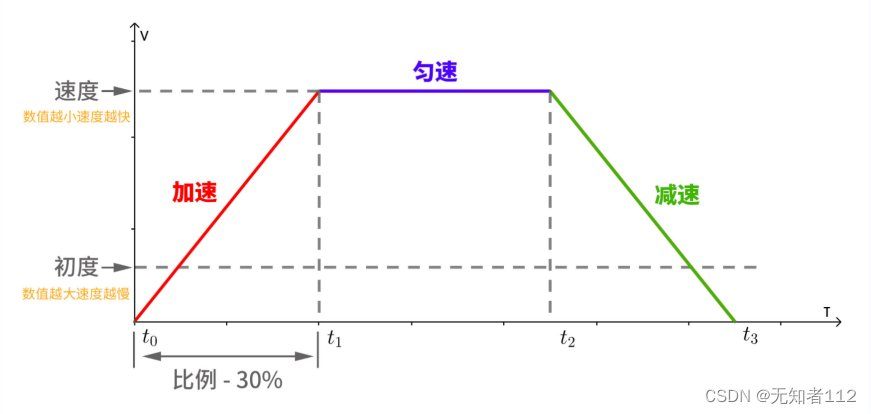
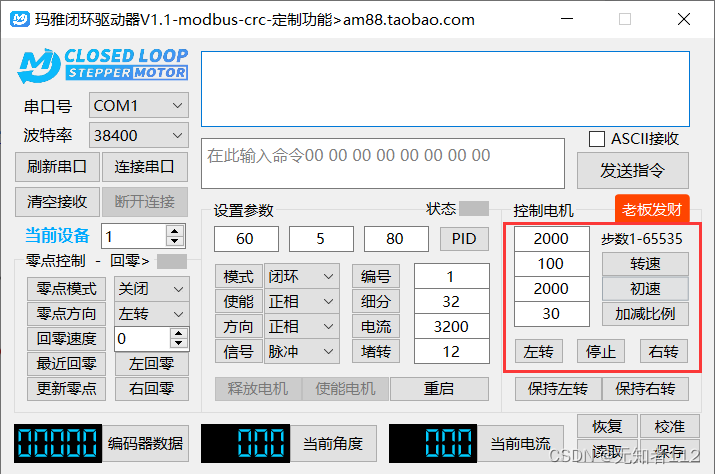
驱动器内置T型相对定位加减速算法,初速和加速比例0为关闭,初速就是启动速度,数值越大越慢,此时转速为峰值速度,数值越小越快,加减比例为加速或减速百分比1%-49%,加减速设置时需要注意参数过大增益程序会取消计算,如2000步的加速步数范围是200030%=600步,初速是2000,峰值速度是100,加速范围是初速2000-100=1900,1900/600=3.16,6003.16=1896没有超过初速是正常的,如果没有反应说明数值增益了,注意峰值速度不能大于初速,步数越大加减速比例应该越小,注意步数和细分,1.8度步进电机200步为一圈,32细分时6400步走一圈,设置好加减速参数后记得点保存后下次启动才会加载
8.故障诊断
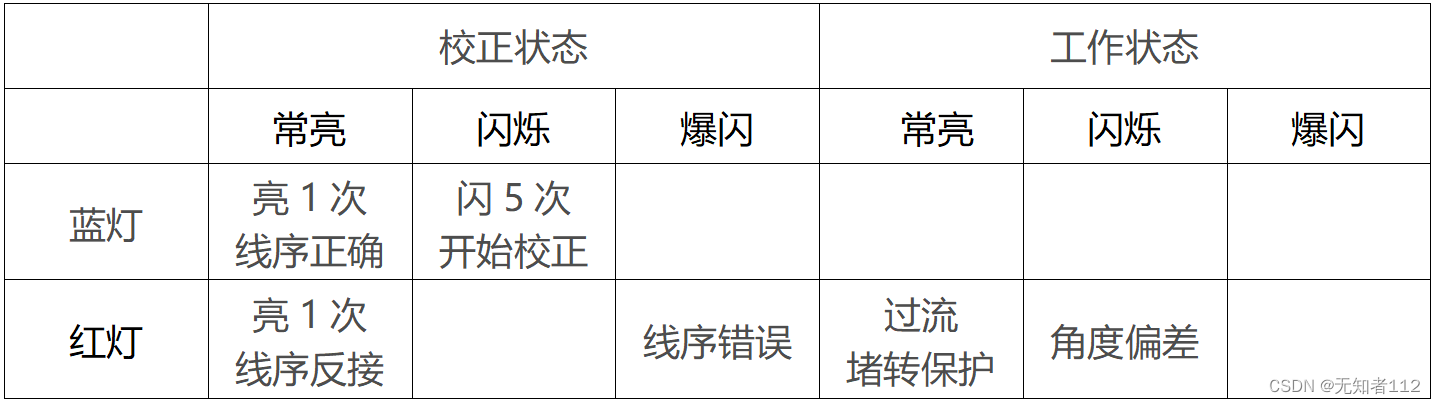
8.1 状态指示灯
8.2 故障及排除
1.驱动器校正时左右抖动,电机不转 解决:检查电机线序是否正确,接错会导致一个绕组左转一个绕组右转原地不动,再检查电机线是否有接触不良,接触不良会导致只有一个绕组在工作,电机走一步无法再走下一步
2.校正完成后电机没有锁定快速旋转或者锁住后一碰电机就快速旋转或者抖动 解决:这种情况一般是校正过程导致编码器数据错误,电机角度错误0-360度如果中间有几度或者十几度丢失,电机肯定会乱转,检查磁铁是否固定牢固,运行过程抖动排查驱动器是否固定牢固,校正完成后驱动器和磁铁是不能移动的,移动就会导致角度有偏差
3.通电后屏幕亮电机没反应 解决:检查使能状态是否有脱机信号触发,如果已经触发脱机,在菜单里将使能信号反相即可,还有检查电压和电流是否过低,设置电流是否过低
4.485控制发送没有信息反馈,请检查驱动器地址是否正确,进入 系统 - 编号 查看设备编号是否对应
5.485控制电机没有反应不旋转,请检查信号源是否将脉冲控制改为485控制,进入 系统 - 信号 修改设置
6.485接收信息乱码,请检查波特率是否对应,进入 系统 - 波特率 修改设置
7.校准事总是显示绕组错误,尝试手动旋转电机再重新校准
8.校准后电机旋转归位异常,出现震荡,如果磁铁也没有偏移,请调节PID的D值,加大或减小,不同厚度的电机扭力不一样,参数也不同,需要注意有的电机背部磁场干扰很大,就需增高磁铁避免磁场干扰编码器
9.配套例程说明
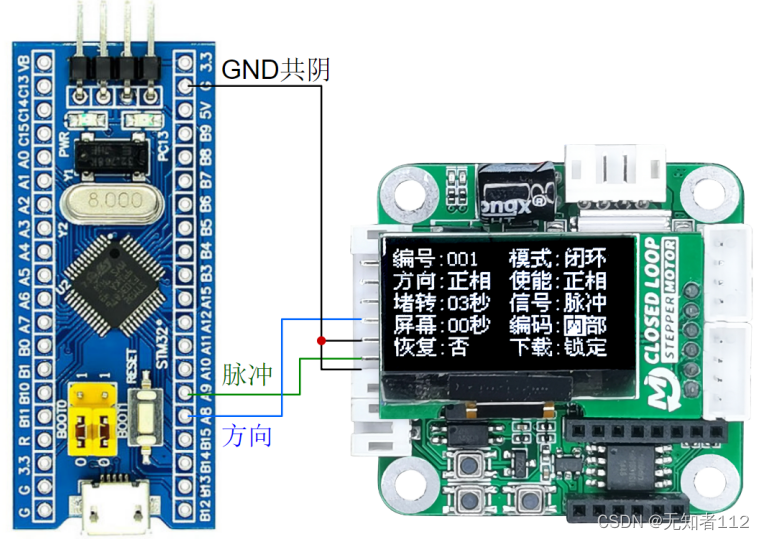
9.1 硬件连接
9.2 代码实现
根据自己的需求更改参数,烧录到单片机上即可
#include "motor.h"
#include "delay.h"
//步进电机控制程序
//引脚A8方向。A9脉冲,改引脚文件motor.c和motor.h
int main(void)
{
int x ;
delay_init(); //延时函数初始化
MOTOR_Init(); //初始化电机引脚
while(1)
{
MOTOR_DIR_H; //电机方向
for(x = 0; x < 6400; x++) // 32细分6400个脉冲转一圈
{
MOTOR_STEP_L; //脉冲信号低电平
delay_us(200);
MOTOR_STEP_H; //脉冲信号高电平
delay_us(200); //脉冲延时间隔、数字越小速度越快
}
//以下为反方向旋转
MOTOR_DIR_L;
for(x = 0; x < 6400; x++)
{
MOTOR_STEP_L;
delay_us(200);
MOTOR_STEP_H;
delay_us(200);
}
}
}
10.安装尺寸图

11.其他
关于我们:桔域世纪
最新固件、上位机及使用手册请入群下载

















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









