






Note: RECURRENT NEURAL NETWORK TUTORIAL, PART 4 – IMPLEMENTING A GRU/LSTM RNN WITH PYTHON AND THEANO
本教程包括以下几个部分
1.Introduction To RNNs
2.Implementing a RNN using Python and Theano
3.Understanding the Backpropagation Through Time (BPTT) algorithm and the vanishing gradient problem
4.Implementing a GRU/LSTM RNN
本文我们将学习LSTM网络和GRUs(Gated Recurrent Units).LSTMs首次由 Sepp Hochreiter和 Jürgen Schmidhuber于1997年提出。GRUs,于2014年首次使用,是LSTMs的一个简单变体。
LSTM网络
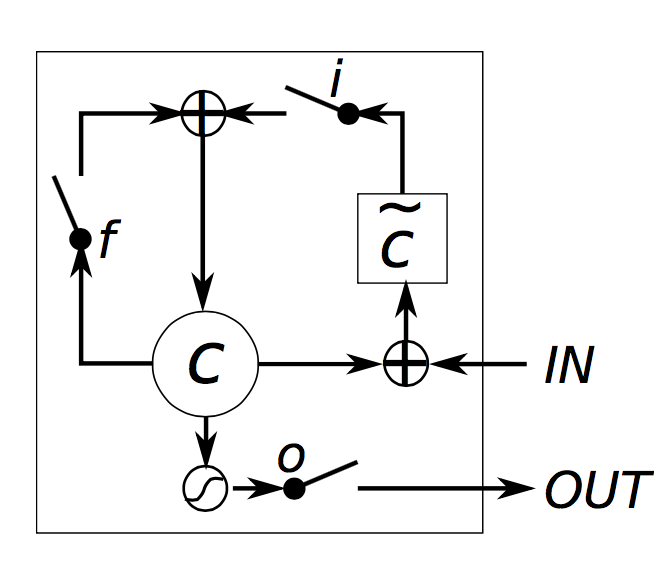
LSTMs我们通过一个门限机制设计用来处理梯度消失问题。首先来看LSTM如何计算隐层状态
st
(用
∘
代表元素相乘)
ifogctst=σ(xtUi+st−1Wi)=σ(xtUf+st−1Wf)=σ(xtUo+st−1Wo)=σ(xtUg+st−1Wg)=ct−1∘f+g∘i=tanh(ct)∘o
- i,f,o 分别叫做input,forget,output gates(门)。注意他们方程完全相同,只是参数不同。称其为门限,是因为sigmod函数将向量的值压缩到0-1之间,通过将其与另一个向量元素相乘,你就可以确定该向量的哪些部分可以通过。输入门定义了对输入新计算的状态的允许通过的部分。遗忘门定义了前一状态允许通过的程度,输出门定义了允许中间层输出暴露给外部网络的程度。
- g是候选隐层状态,根据当前输入及前一隐层状态计算。与原始RNN计算方式完全相同。
- ct 是中间记忆单元。是前一状态和遗忘门的乘积,以及新状态g和输入门的乘积。
- 对于记忆
ct
。不是所有的中间状态层与隐层状态相关。
标准RNN可以看做LSTMs的一个特例。即输入门置1,遗忘门置0,输出门置1。
另外还有很多LSTM的变体。一个比较常见的变体是创建一个peephole连接,从而允许门限不仅依赖于上一隐层,还依赖于上一中间状态层。 LSTM: A Search Space Odyssey 介绍了各种LSTM结构。
GRUs
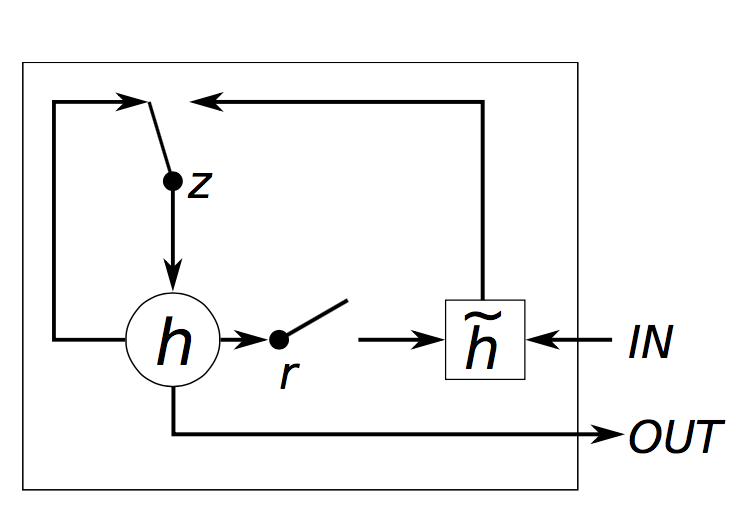
GRU的思想与LSTM十分类似,如公式:
zrhst=σ(xtUz+st−1Wz)=σ(xtUr+st−1Wr)=tanh(xtUh+(st−1∘r)Wh)=(1−z)∘h+z∘st−1
GRU有两个门,重置门
r
,和更新门
- GRU有两个门限,LSTM有三个。
- 输入门和遗忘门通过更新门组合,重置门直接应用于前一隐层状态。因此,LSTM中的重置门的任务分担到(GRU中的)重置门与更新门中。
- 计算输出时没有采用第二个非线性单元。
GRU VS LSTM
许多任务中,GRU和LSTM具有相当的性能,超参数的调整比结构的选择更为重要。GRUs参数更少,因此训练速度会快一点,或者需要更少的数据去泛化。也就是说,如果你有更多的数据,LSTMs也许会有更好的结果。















 418
418











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









