







 本文详细介绍了Xilinx ZYNQ 7000系列芯片的三种GPIO使用方式:MIO、EMIO和AXI_GPIO。MIO不消耗PL资源,EMIO消耗PL管脚资源,而AXI_GPIO通过M_AXI_GPIO接口控制PL,同时消耗管脚和逻辑资源。通过具体示例展示了如何在Vivado和SDK中配置与使用这三种GPIO,包括管脚约束和功能验证。
本文详细介绍了Xilinx ZYNQ 7000系列芯片的三种GPIO使用方式:MIO、EMIO和AXI_GPIO。MIO不消耗PL资源,EMIO消耗PL管脚资源,而AXI_GPIO通过M_AXI_GPIO接口控制PL,同时消耗管脚和逻辑资源。通过具体示例展示了如何在Vivado和SDK中配置与使用这三种GPIO,包括管脚约束和功能验证。
前言:
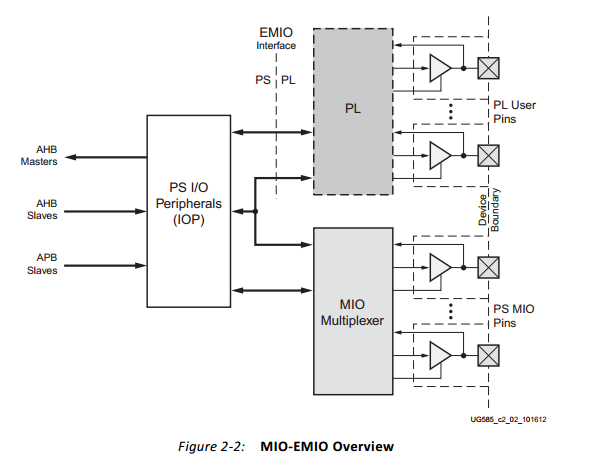
ZYNQ 7000有三种GPIO:MIO,EMIO,AXI_GPIO
MIO是固定管脚的,属于PS,使用时不消耗PL资源;EMIO通过PL扩展,使用时需要分配管脚,使用时消耗PL管脚资源;AXI_GPIO是封装好的IP核,PS通过M_AXI_GPIO接口控制PL部分实现IO,使用时消耗管脚资源和逻辑资源。
使用的板子是zc702。
1.MIO方式
Zynq7000 系列芯片有 54 个 MIO(multiuse I/O), 它们分配在 GPIO 的 Bank0 和Bank1 隶属于 PS 部分, 这些 IO 与 PS 直接相连。 不需要添加引脚约束, MIO 信号对 PL部分是透明的, 不可见。 所以对 MIO 的操作可以看作是纯 PS 的操作。

新建Vivado工程,添加ZYNQ CPU核,双击,配置好时钟和内存类型,确认勾选MIO:

如系列(三)文章所述,生成bit stream,然后Launch SDK。
在SDK中新建工程,源文件如下:
#include "xgpiops.h"
#include "sleep.h"
int main()
{
static XGpioPs psGpioInstancePtr;
XGpioPs_Config* GpioConfigPtr;
int iPinNumber= 8; //DS12连接的是MIO8
u32 uPinDirection = 0x1; //1表示输出, 0表示输入
int xStatus;
//--MIO的初始化
GpioConfigPtr = XGpioPs_LookupConfig(XPAR_PS7_GPIO_0_DEVICE_ID);
if(GpioConfigPtr == NULL)
return XST_FAILURE;
xStatus = XGpioPs_CfgInitialize(&psGpioInstancePtr,GpioConfigPtr,
GpioConfigPtr->BaseAddr);
if(XST_SUCCESS != xStatus)
print(" 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









