







CY8CKIT042BLEKIT 开发板安装 KitProg USB-UART驱动 时;给大神要驱动时,没找到,
我的板子:CY8CKIT042BLEKIT
就是索性安装了ide,PSoC Creator 3.3;因为安装ide时,驱动会自己安装好;
发现悲剧了;
人家win8,win10都么事;有的win7也没事,但是我的就悲剧;
其实我连他的driver在哪里都不知道;
后来找到在:D:\Program Files\Cypress\Programmer\3.18\drivers\KitProg
发现下面还有D:\Program Files\Cypress\Programmer\3.18\drivers\KitProg2
不管哪个都不行;
思路1 百度类似问题,发现说inf少,会导致安装不成功;
先下载两个文件:(在帖子的最后,我会提供)
mdmcpq.inf
usbser.sys
将mdmcpq.inf复制到c:\windows\inf
将usbser.sys复制到c:\windows\system32\drivers
试着想更新到4.1,但是,感觉是系统问题,不是软件问题;
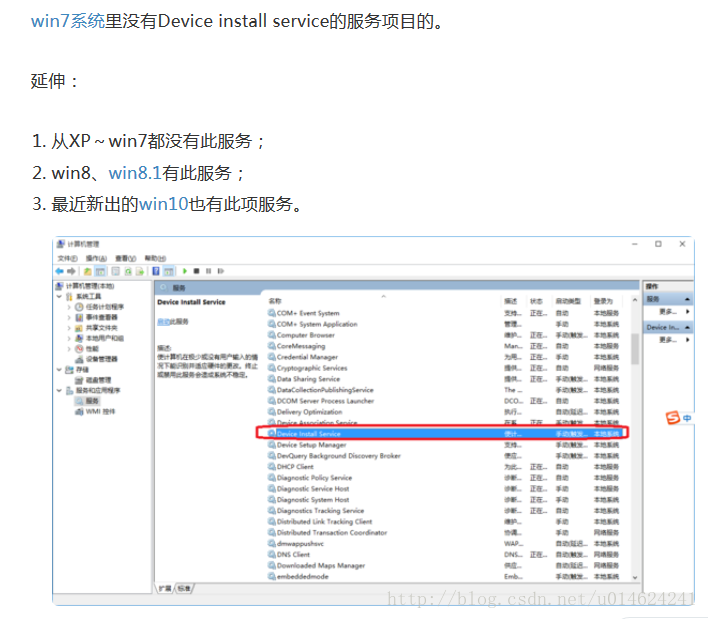
思路2 说从电脑-服务里,启动devices服务;
我发现我的win7就没有这个3个服务
思路3 安装驱动遇到一个问题,找不到指定文件,一般都是系统都说ghost的,不是正经系统,需要修复;
修改工具(RestroeDvrIndex),太厉害了;
双击修复时,会重启电脑,记得保存;
完美=解决我的问题;

修复工具和思路1提供文件 下载链接:点我
















 720
720

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











