






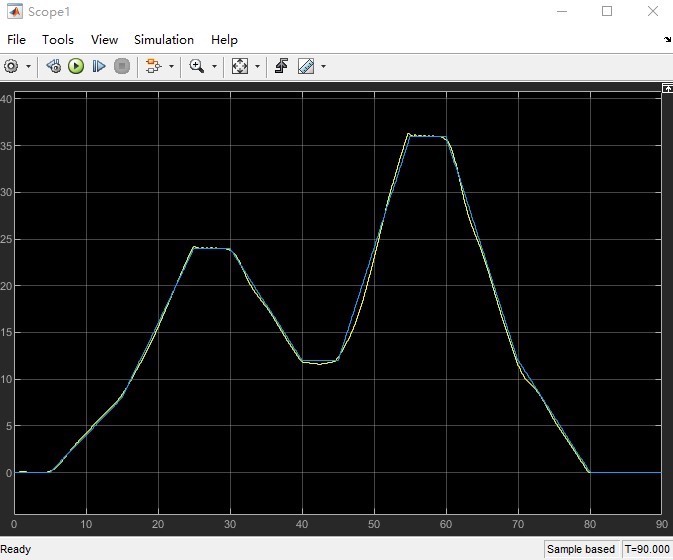
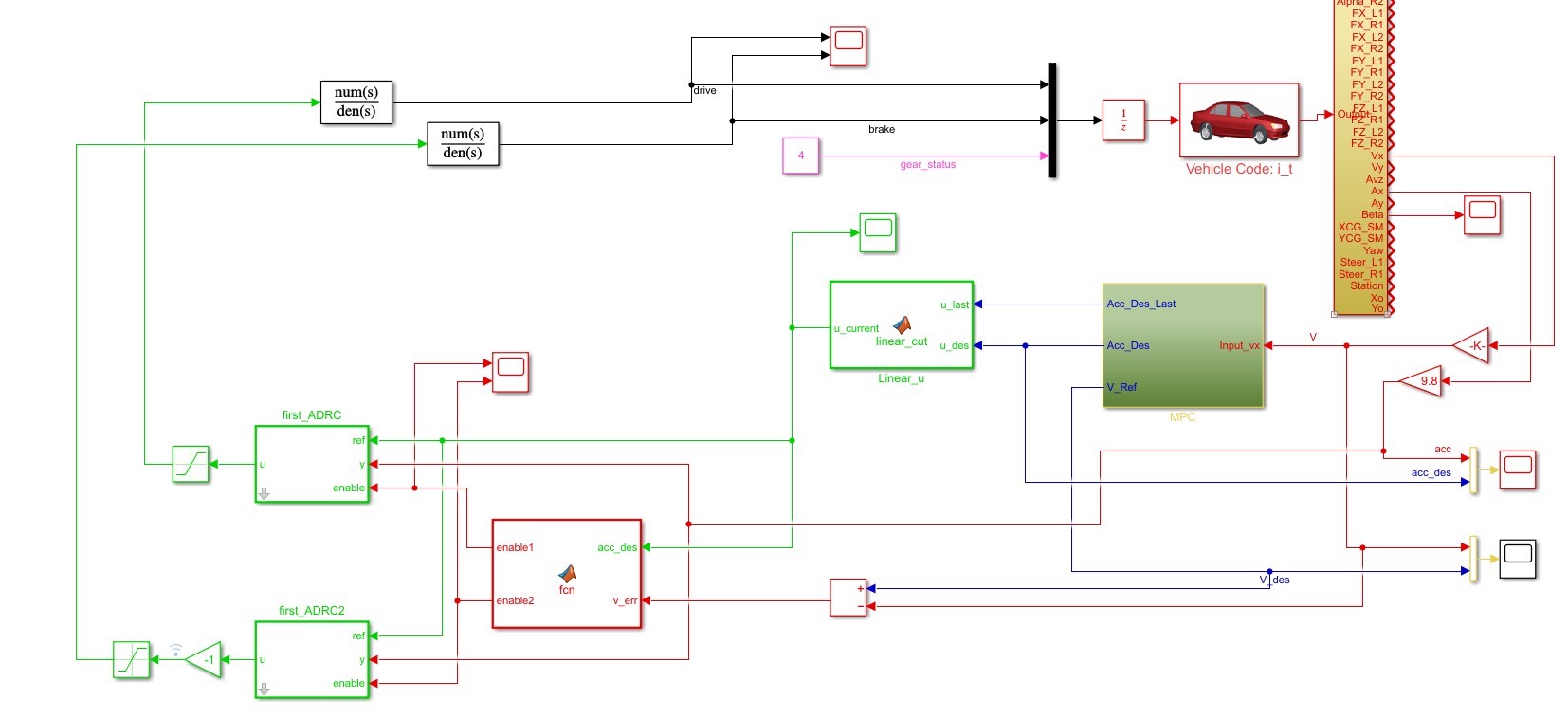
基于模型预测MPC和自抗扰adrc实现的车速控制,控制目标为燃油汽车,采用上下层控制器控制,上层mpc产生期望的加速度,下层采用自抗扰ADRC控制产生期望的节气门开度和制动压力,该算法可直接用于代码生成(可做实车试验实验),后续可以用于车速需求的控制(如acc,轨迹跟踪等)。
有对应复现资料。
ID:27240689070144398
想剁手书屋14
基于模型预测控制(Model Predictive Control,MPC)和自抗扰控制(Active Disturbance Rejection Control,ADRC)的车速控制
概述:
车速控制对于燃油汽车来说是非常重要的一项技术,它可以通过控制加速度、节气门开度和制动压力等参数,实现车速的精确控制。本文将介绍一种基于模型预测控制(MPC)和自抗扰控制(ADRC)的车速控制方法。该方法采用上下层控制器,上层控制器使用MPC算法产生期望的加速度,下层控制器采用ADRC算法产生期望的节气门开度和制动压力。该方法具有较高的控制精度和鲁棒性,可直接用于代码生成,并可用于车速需求的控制,如主动巡航控制(ACC)和轨迹跟踪等。
模型预测控制(MPC):
MPC是一种基于模型的控制方法,它通过对系统未来的状态和输入进行优化,实现对系统的控制。在车速控制中,MPC可以根据当前车辆状态
相关的代码,程序地址如下:http://fansik.cn/689070144398.html
















 3203
3203

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









